几何倍增加速二维多级双连杆杠杆手动排球发球机的制作方法
1.本发明涉及排球发球机领域,特别涉及了一种几何倍增加速二维多级双连杆杠杆手动排球发球机。
技术背景
2.传统人工发球速度慢。只有使用几何倍增加速二维多级双连杆杠杆,并且在增加费力杠杆时不增加身体姿势长度才能达到加速目的。
技术实现要素:
3.本发明是为了实现快速发球,特提供了一种几何倍增加速二维多级双连杆杠杆手动排球发球机。
4.本发明提供了一种几何倍增加速二维多级双连杆杠杆手动排球发球机,多级为2、3、4、5或更多级;多级杠杆横向纵向二维设置充分利用空间;每一级杠杆主体包括一个双连杆,每个双连杆里的两根相邻连杆平行排列;每个双连杆形状、大小一致,间距一致。第n+1级杠杆主体设置在第n级杠杆主体前侧,第n+1级杠杆主体通过拐形件与第n级杠杆主体连接;由后至前,最后端为第一级杠杆主体。所述的第一级杠杆主体双连杆从支架右边延伸至左边,左端通过销轴连接左短竖杆。所述的左短竖杆固定连接拐杆把手。所述的第一级杠杆主体双连杆从右短竖杆到支架的部分与左短竖杆到支架的部分长度相等。所述的拐形件左右两端竖杆与支架平行;每个拐形件形状、大小一致。所述的支架、拐形件、左短竖杆、右短竖杆、传动直杆与每一级双连杆通过销轴连接。所述的传动直杆末端固定连接发射筒。
5.当几何倍增加速二维多级双连杆杠杆运行时,外力经拐杆把手先作用于第一级杠杆主体双连杆产生速度,该速度经第一级杠杆主体双连杆按杠杆比传给第一个拐形件,再经第一个拐形件传给第二级杠杆主体双连杆,再经第二级杠杆主体双连杆按杠杆比传给第二个拐形件,再经第二个拐形件传给第三级杠杆主体双连杆,再经第三级杠杆主体双连杆按杠杆比传给第三个拐形件,再经第三个拐形件传给第四级杠杆主体双连杆,再经第四级杠杆主体双连杆按杠杆比传给第四个拐形件,再经第四个拐形件传给第五级杠杆主体双连杆,再经第五级杠杆主体双连杆按杠杆比传给第五个拐形件,再经第五个拐形件传给第六级杠杆主体双连杆,再经第六级杠杆主体双连杆按杠杆比传给传动直杆,从而使速度几何倍增的带动传动直杆、发射筒向前方加速使排球从发射筒发射。
6.当几何倍增加速二维多级双连杆杠杆平行支架向后方运动时,带动第一级杠杆主体在支架左边的部分平行支架向前方运动;当第一级杠杆主体在支架左边的部分平行支架向后方运动时,带动几何倍增加速二维多级双连杆杠杆平行支架向前方运动。
7.当用手推拐杆把手时,会带动几何倍增加速二维多级双连杆杠杆平行支架做运动。当手推拐杆把手到最后端时用手推拐杆把手归位,周而往复运动发射。
8.传统人工发球速度慢。本发明的几何倍增加速二维多级双连杆杠杆加速倍数则为几何倍增。
9.本发明的优点:
10.本发明所述的几何倍增加速二维多级双连杆杠杆手动排球发球机结构耐用,快速。
附图说明
11.下面结合附图及实施方式对本发明做进一步详细说明。
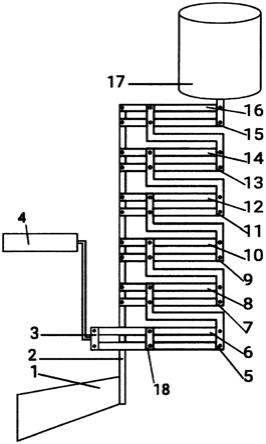
12.图1为几何倍增加速二维六级双连杆杠杆手动排球发球机结构示意图;
13.图2为几何倍增加速二维五级双连杆杠杆手动排球发球机结构示意图。
具体实施方式
14.实施例一
15.本实施例提供了一种几何倍增加速二维六级双连杆杠杆手动排球发球机,其特征在于:所述的几何倍增加速二维六级双连杆杠杆手动排球发球机,包括手柄1,支架2,左短竖杆3,拐杆把手4,第一个拐形件5,第一级杠杆主体双连杆6,第二个拐形件7,第二级杠杆主体双连杆8,第三个拐形件9,第三级杠杆主体双连杆10,第四个拐形件11,第四级杠杆主体双连杆12,第五个拐形件13,第五级杠杆主体双连杆14,传动直杆15,第六级杠杆主体双连杆16,发射筒17,右短竖杆18及若干销轴。所述的第一级杠杆主体双连杆6从支架2右边延伸至左边,左端通过销轴连接左短竖杆3。所述的左短竖杆3固定连接拐杆把手4。所述的第一级杠杆主体双连杆6从右短竖杆18到支架2的部分与左短竖杆3到支架2的部分长度相等。所述的拐形件5、7、9、11、13左右两端竖杆与支架2平行。所述的支架2,拐形件5、7、9、11、13,左短竖杆3,右短竖杆18,传动直杆15与每一级双连杆通过销轴连接。所述的传动直杆15末端固定连接发射筒17。当几何倍增加速二维六级双连杆杠杆运行时,外力经拐杆把手4先作用于第一级杠杆主体双连杆6产生速度,该速度经第一级杠杆主体双连杆6按杠杆比传给拐形件5,再经拐形件5传给第二级杠杆主体双连杆8,再经第二级杠杆主体双连杆8按杠杆比传给拐形件7,再经拐形件7传给第三级杠杆主体双连杆10,再经第三级杠杆主体双连杆10按杠杆比传给拐形件9,再经拐形件9传给第四级杠杆主体双连杆12,再经第四级杠杆主体双连杆12按杠杆比传给拐形件11,再经拐形件11传给第五级杠杆主体双连杆14,再经第五级杠杆主体双连杆14按杠杆比传给拐形件13,再经拐形件13传给第六级杠杆主体双连杆16,再经第六级杠杆主体双连杆16按杠杆比传给传动直杆15,从而使速度几何倍增的带动传动直杆15、发射筒17向前方加速使排球从发射筒17发射。
16.当几何倍增加速二维六级双连杆杠杆平行支架向后方运动时,带动第一级杠杆主体在支架左边的部分平行支架向前方运动;当第一级杠杆主体在支架左边的部分平行支架向后方运动时,带动几何倍增加速二维六级双连杆杠杆平行支架向前方运动。
17.当用手推拐杆把手时,会带动几何倍增加速二维六级双连杆杠杆平行支架做运动。当手推拐杆把手到最后端时用手推拐杆把手归位,周而往复运动发射。
18.传统人工发球速度慢。本发明的几何倍增加速二维六级双连杆杠杆加速倍数则为几何倍增。
19.传动杆传动,结构结实。
20.实施例二
21.实施例一的几何倍增加速二维六级双连杆杠杆手动排球发球机可缩至几何倍增加速二维五级双连杆杠杆手动排球发球机,如图2所示,其结构、功能及原理类似实施例一。
技术特征:
1.一种几何倍增加速二维多级双连杆杠杆手动排球发球机,其特征是:所述的传动直杆末端固定连接发射筒。
技术总结
一种几何倍增加速二维多级双连杆杠杆手动排球发球机,支架右边设有一组几何倍增加速二维多级双连杆杠杆,多级可以是2、3、4、5或更多级,最后一级杠杆连接设置传动直杆,传动直杆末端固定连接发射筒。当用手推拐杆把手带动几何倍增加速二维多级双连杆杠杆向前方运行时,带动传动直杆、发射筒向前方运动使排球从发射筒发射。本发明通过几何倍增加速二维多级双连杆杠杆达到加速效果。双连杆纵向横向二维设置充分利用空间。本发明的优点:结构结实,速度快。度快。度快。
技术研发人员:梅斌
受保护的技术使用者:梅斌
技术研发日:2022.03.02
技术公布日:2022/5/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1