一种模拟马的制作方法
1.本实用新型涉及一种仿真模拟机构,具体的说是一种具备有高仿真控制及活动的模拟马。
背景技术:
2.马术是奥运会常设比赛项目之一,且研究究发现骑马能够活动人的腰腹背臂,在摆动中,身体做出被动适应性调整,从而达到运动锻炼的目的。实验证明骑马能显著缓解腰酸背痛、脖子发硬等症状。所以,马术深受人们喜爱,越来越多的人开始学习骑马,甚至从青少年时期就学习马术。
3.但是骑真马会使我们受到意外运动的伤害可能,因此没有受过适当的训练就直接去骑真马是具有危险性的。但一直没有标准的骑马教学,来系统来解决这个问题。为了解决这些问题,杰出的概念是骑马模拟器,创造仿生机械马匹。经济上仿生马匹比骑真马便宜得多,并且无需饲养和繁琐的维护工作。其运动的可控性使我们免受意外伤害,并使用互联网程序指导我们学习骑马学习。
4.由于此类模拟马尚属于新兴行业,现有产品的结构及功能上均较秋简单,在姿态拟真度以及操控仿真度上均存在明显不足,故而,提供一种高仿真控制及活动的模拟马对本行业有着重要的意义。
技术实现要素:
5.本实用新型的目的在于克服现有技术所存在的不足,提供一种具备有高仿真控制及活动的模拟马。
6.为实现上述目的,本实用新型所采用的技术方案是:一种模拟马,包括造型外壳、运动机构、主机、骑行重心监测组件、辅助控制组件,造型外壳安装在运动机构上;主机安装在运动机构内用于控制运动机构运动;骑行重心监测组件安装在造型外壳上并与主机相连用于监测骑行人员的重心位置;两辅助控制组件对称安装在造型外壳的两侧面上。
7.进一步的说,运动机构包括底座、活动基板、竖置电控伸缩杆、斜置电控伸缩杆,三根呈三角布置的竖置电控伸缩杆的一端通过转轴铰装在底座上,另一端铰装在活动基板的底面上;底座上设有一竖直安装杆,斜置电控伸缩杆一端通过转轴铰装在安装杆上,另一端通过转轴铰装在活动基板的底面上;各竖置电控伸缩杆及斜置电控伸缩杆均与主机相连,受主机控制。
8.进一步的说,骑行重心监测组件包括贴设在造型外壳马背位置上的蝶冀状基板、安装在基板上的前气囊组、后气囊组以及独立与各前气囊组及后气囊组相连的气压传感器,气压传感器通过线缆与主机相连,用于向主机发送压力值监测信号。
9.进一步的说,辅助控制组件包括多个独立气囊袋,各独立气囊袋独立与一气压传感器相连,各气压传感器与主机相连,用于监测各独立气囊袋的气压值变化。
10.进一步的说,造型外壳的马头位置上安装有与主机相连的拉力应变传感器,拉力
应变传感器与一缰绳相连,经由拉力应变传感器感应缰绳拉力。
11.更进一步的说,拉力应变传感器呈杆状,包括一柱形本体以及插入柱形本体内且两端伸出柱形本体外的工作杆,工作杆的两端与缰绳相连
12.本实用新型结构简单,设计合理,通过特定结构的运动机构,即使整体结构简单,也可满足多姿态的动态变化,此外,由于模拟马上安装有骑行重心监测组件、辅助控制组件以及与缰绳相连的拉力应变传感器,可以实现多维度的控制以及重心监测,功能强度,使用灵活性高。
附图说明
13.附图被结合在说明书中并构成说明书的一部,附图示出了本说明书的实施例,并且连同其说明一起用于解释本说明书的原理。
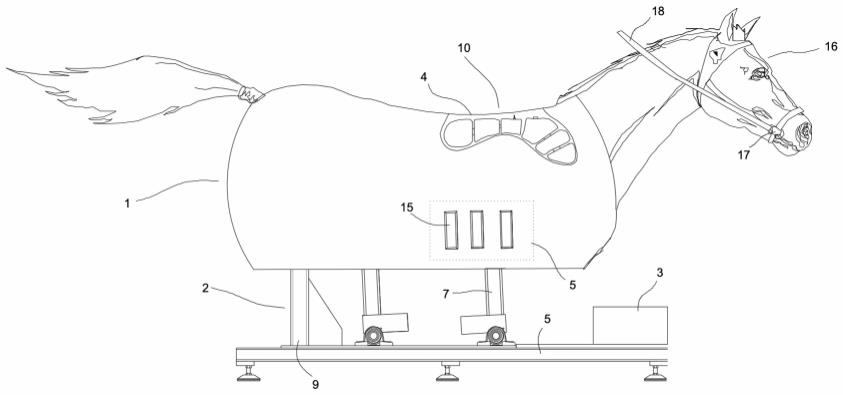
14.图1是本实用新型的结构示意图。
15.图2是本实用新型中运动机构的结构示意图。
16.图3是本实用新型中运动机构另一视角的结构示意图。
17.图4是本实用新型中骑行重力监测组件的结构示意图。
18.图5是本实用新型中马头局部的结构示意图。
19.图6是本实用新型中拉力应变传感器的结构示意图。
20.图7是本实用新型在工作时重力监测组件的一种工作状态示意图。
21.图8是本实用机型在工作时重力监测组件另一种工作状态示意图。
具体实施方式
22.现在将参照附图来详细描述本说明书的各种示例性实施例。
23.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本说明书及其应用或使用的任何限制。
24.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一 个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
25.在本发明的描述中,需要说明的是,术语“竖直”、“上”、“下”、“水平”等指示的方位 或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而 不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此 不能理解为对本发明的限制。
26.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、
ꢀ“
安装”、“相连”、“连接”应做广义理解。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
27.实施例:
28.如图1-8所示,示例性结构中包括造型外壳1、运动机构2、主机3、骑行重心监测组件4、辅助控制组件5,造型外壳1安装在运动机构2上;主机3安装在运动机构2内用于控制运动机构2运动;骑行重心监测组件4安装在造型外壳1上并与主机3相连用于监测骑行人员的重心位置;两辅助控制组件4对称安装在造型外壳1的两侧面上。
29.运动机构2包括底座5、活动基板6、竖置电控伸缩杆7、斜置电控伸缩杆8,三根呈三
角布置的竖置电控伸缩杆7的一端通过转轴铰装在底座5上,另一端铰装在活动基板6的底面上;底座5上设有一竖直安装杆9,斜置电控伸缩杆8一端通过转轴铰装在安装杆9上,另一端通过转轴铰装在活动基板6的底面上;各竖置电控伸缩杆7及斜置电控伸缩杆8均与主机3相连,受主机3控制。
30.骑行重心监测组件4包括贴设在造型外壳1马背位置10上的蝶冀状基板11、安装在基板11上的前气囊组12、后气囊组13以及独立与各前气囊组13及后气囊组13相连的气压传感器14,气压传感器14通过线缆与主机3相连,用于向主机3发送压力值监测信号。
31.辅助控制组件5包括多个独立气囊袋15,各独立气囊袋15独立与一气压传感器相连,各气压传感器与主机3相连,用于监测各独立气囊袋15的气压值变化。
32.造型外壳1的马头16位置上安装有与主机3相连的拉力应变传感器17,拉力应变传感器17与一缰绳18相连,经由拉力应变传感器感17应缰绳18拉力。
33.拉力应变传感器17呈杆状,包括一柱形本体19以及插入柱形本体19内且两端伸出柱形本体19外的工作杆20,工作杆20的两端与缰绳18相连
34.以上已经描述了本说明书的各实施例,上述说明是示例性的,并非穷尽性的,并且 也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本 技术领域的普通技术人物来说许多修改和变更都是显而易见的。本文中所用术语的选择, 旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的 其它普通技术人物能理解本文披露的各实施例。本申请的范围由所附权利要求来限定。
技术特征:
1.一种模拟马,其特征在于:包括造型外壳、运动机构、主机、骑行重心监测组件、辅助控制组件,造型外壳安装在运动机构上;主机安装在运动机构内用于控制运动机构运动;骑行重心监测组件安装在造型外壳上并与主机相连用于监测骑行人员的重心位置;两辅助控制组件对称安装在造型外壳的两侧面上。2.如权利要求1中所述的一种模拟马,其特征在于:运动机构包括底座、活动基板、竖置电控伸缩杆、斜置电控伸缩杆,三根呈三角布置的竖置电控伸缩杆的一端通过转轴铰装在底座上,另一端铰装在活动基板的底面上;底座上设有一竖直安装杆,斜置电控伸缩杆一端通过转轴铰装在安装杆上,另一端通过转轴铰装在活动基板的底面上;各竖置电控伸缩杆及斜置电控伸缩杆均与主机相连,受主机控制。3.如权利要求1中所述的一种模拟马,其特征在于:骑行重心监测组件包括贴设在造型外壳马背位置上的蝶冀状基板、安装在基板上的前气囊组、后气囊组以及独立与各前气囊组及后气囊组相连的气压传感器,气压传感器通过线缆与主机相连,用于向主机发送压力值监测信号。4.如权利要求1中所述的一种模拟马,其特征在于:辅助控制组件包括多个独立气囊袋,各独立气囊袋独立与一气压传感器相连,各气压传感器与主机相连,用于监测各独立气囊袋的气压值变化。5.如权利要求1中所述的一种模拟马,其特征在于:造型外壳的马头位置上安装有与主机相连的拉力应变传感器,拉力应变传感器与一缰绳相连,经由拉力应变传感器感应缰绳拉力。6.如权利要求5中所述的一种模拟马,其特征在于:拉力应变传感器呈杆状,包括一柱形本体以及插入柱形本体内且两端伸出柱形本体外的工作杆,工作杆的两端与缰绳相连。
技术总结
本实用新型公开了一种模拟马,包括造型外壳、运动机构、主机、骑行重心监测组件、辅助控制组件,造型外壳安装在运动机构上;主机安装在运动机构内用于控制运动机构运动;骑行重心监测组件安装在造型外壳上并与主机相连用于监测骑行人员的重心位置;两辅助控制组件对称安装在造型外壳的两侧面上。本实用新型结构简单,设计合理,通过特定结构的运动机构,即使整体结构简单,也可满足多姿态的动态变化,此外,由于模拟马上安装有骑行重心监测组件、辅助控制组件以及与缰绳相连的拉力应变传感器,可以实现多维度的控制以及重心监测,功能强度,使用灵活性高。用灵活性高。用灵活性高。
技术研发人员:刘志 邱德志
受保护的技术使用者:广东探月教育设备有限公司
技术研发日:2022.07.11
技术公布日:2023/1/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1