一种AR全地形步行模拟器的制作方法
本技术涉及ar,具体为一种ar全地形步行模拟器。
背景技术:
1、随着vr技术的发展,各种ar(增强现实技术)设备也日益繁多,比如如今市面上出现了万向跑步机,利用机械环固定腰部,使得人可以快速的在光滑带倾角的跑步机上跑动。但是没有一款设备可以与vr游戏同步,利用虚拟建模技术模拟出游戏地面的起伏不平和障碍物。本设备利用推杆、滚珠等设备单元高度差,可以实现模拟人行走在野地,都市,石子路,扶手电梯等具体场景,达到了逼真拟真效果。利用动作捕捉技术,对穿上设备的人进行速度分析,和行为预判,与本机械所模拟的游戏地形进行定位校准。利用编程系统,对滚珠和挖状结构的马达进行操控,抵消人行走的摩擦力,达到人行走在上面如跑步机上的效果。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种ar全地形步行模拟器,具备模拟人行走在野地,都市,石子路,扶手电梯等具体场景,达到了逼真拟真效果,且相比市面上相同自由度的机械手结构接触面的排列更紧密。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:
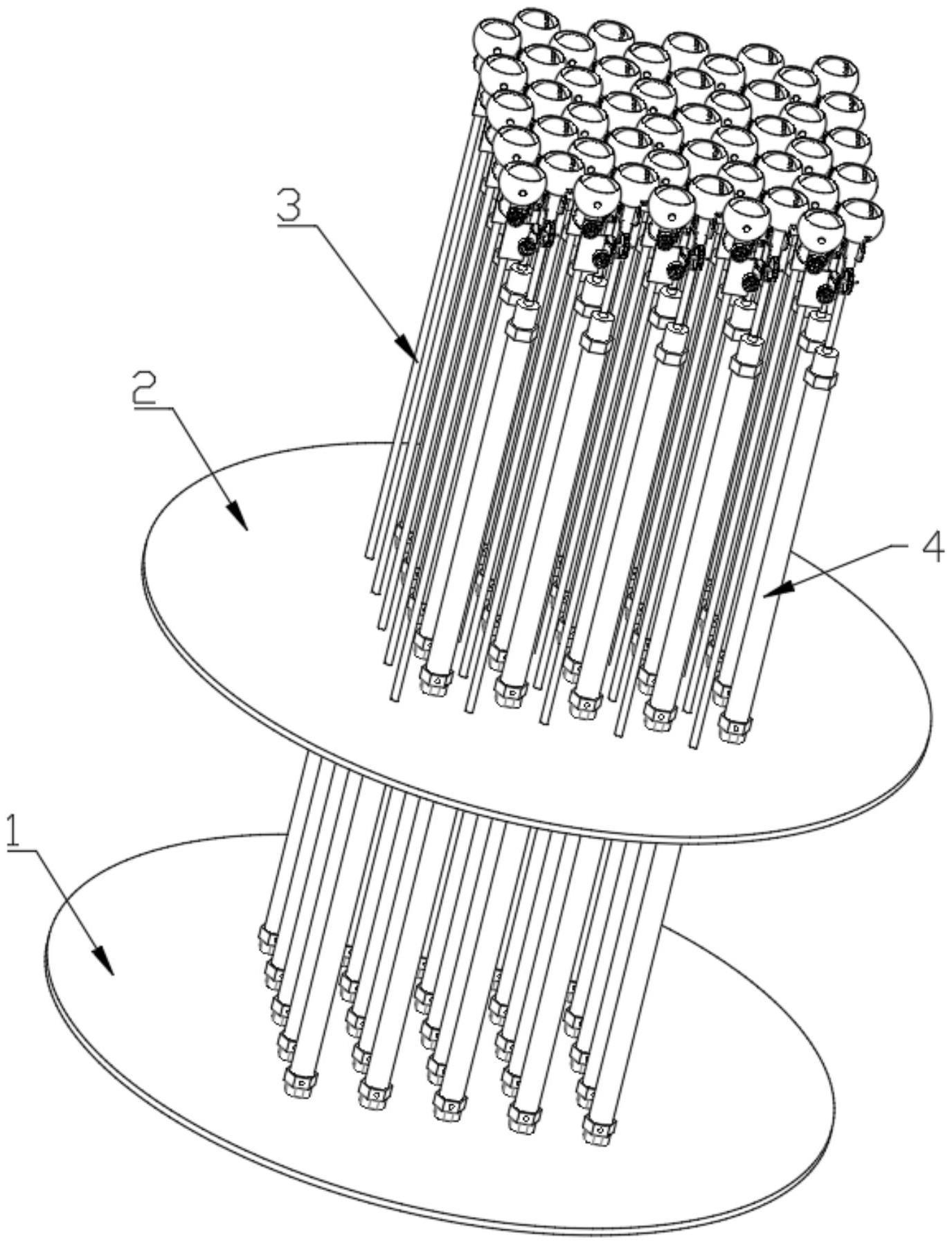
5、一种ar全地形步行模拟器,包括底座结构和设置在所述底座结构上的若干个单体钵体滚珠结构;若干个所述单体钵体滚珠结构分成两组,两组所述单体钵体滚珠结构均呈矩形阵列状分布;且两组所述单体钵体滚珠结构之间间隔错位排列,使若干个所述单体钵体滚珠结构紧密的排列;一组的所述单体钵体滚珠结构通过第一伸缩结构进行支撑,另一组所述单体钵体滚珠结构通过第二伸缩结构进行支撑;所述第一伸缩结构和第二伸缩结构的推进行程不相等,通过第一伸缩结构和第二伸缩结构使得若干个所述单体钵体滚珠结构模拟不同的地形。
6、优选的,所述底座结构包括下底座板和上底座板,所述下底座板和上底座板平行设置。
7、优选的,所述第一伸缩结构为第一电动推杆,所述第二伸缩结构为第二电动推杆。
8、优选的,所述第一伸缩结构的下端套筒部通过螺栓固定安装在下底座板和上底座板之间,其上端伸缩部穿过上底座板并于钵体滚珠结构连接。
9、优选的,所述第二伸缩结构的下端套筒部通过螺栓固定安装在上底座板上,其山东固安伸缩部与钵体滚珠结构连接。
10、优选的,所述单体钵体滚珠结构包括钵体和转动设置在所述钵体内的滚珠,所述钵体的下端固定连接有连接套筒,所述连接套筒的下端活动连接在电动推杆的上端;所述钵体呈半球壳状,其内部横向设有转轴,所述转轴穿过所述滚珠的中心,且转动的两端转动连接在位于钵体两侧的转轴孔内;所述连接套筒的上设有驱动滚珠转动的第一驱动机构;且连接套筒的的下部设有驱动钵体在电动推杆上转动的第二驱动机构。
11、优选的,所述驱动机构包括第一马达,所述第一马达通过第一马达固定板固定连接在连接套筒的外侧上部;所述第一马达的输出端穿过第一马达固定板并连接有齿轮;所述钵体的下端面一侧设有通槽,所述滚珠的表面设有一圈齿槽,所述齿轮的上部穿过通槽与滚珠上的齿槽啮合传动;
12、优选的,所述通槽的方向和转轴的方向垂直,从而保证滚珠围绕转轴转动。
13、当第一马达转动时,带动齿轮转动,齿轮转动带动滚珠绕横轴旋转,实现对设备上方物体提供摩擦力。
14、优选的,所述第二驱动机构包括第二马达,所述第二马达固定安装在第二马达固定板上,所述第二马达固定板的远离第二马达的一侧上部和下部均设有连接耳,上部的所述连接耳固定连接在连接套筒的外侧,其下部的所述连接耳呈环状套设在电动推杆的外侧;所述第二马达的输出端穿过第二马达固定板并连接有蜗轮,所述电动推杆的上端固定连接有蜗杆,所述蜗轮和蜗杆之间啮合传动;当第二电动转动时,带动蜗轮转动,由于蜗杆是固定连接在电动推杆上的,因此,蜗轮的转动使得蜗轮、第二马达固定板、连接套筒和钵体一起实现水平方向绕电动推杆在xy面实现360度自由度。同时电动推杆可以带动其沿z轴方向上下移动,从而实现正上方接触滚珠的物体可以拥有xyz三个轴的自由度。
15、优选的,所述钵体结构的顶部平台包裹皮革材料,辅助滚珠模拟摩擦力。
16、(三)有益效果
17、与现有技术相比,本实用新型提供了一种ar全地形步行模拟器,具备以下有益效果:
18、1、该ar全地形步行模拟器,利用不同行程的伸缩结构带动若干个单体钵体滚珠上下移动,可以实现模拟人行走在野地,都市,石子路,扶手电梯等具体场景,达到了逼真拟真效果。
19、2、该ar全地形步行模拟器,通过电动推杆、滚珠、马达等机械设备实现正上方接触滚珠的物体可以拥有xyz三个轴的自由度。通过电动推杆实现在z轴上下的自动度,利用钵体结构实现水平方向绕气缸在xy面实现360度自由度,利用马达驱动齿轮,齿轮带动滚珠绕横轴旋转实现对设备上方物体提供摩擦力。
技术特征:
1.一种ar全地形步行模拟器,包括底座结构和设置在所述底座结构上的若干个单体钵体滚珠结构(5);其特征在于:若干个所述单体钵体滚珠结构(5)分成两组,两组所述单体钵体滚珠结构(5)均呈矩形阵列状分布;且两组所述单体钵体滚珠结构(5)之间间隔错位排列,使若干个所述单体钵体滚珠结构(5)紧密的排列;一组的所述单体钵体滚珠结构(5)通过第一伸缩结构(3)进行支撑,另一组所述单体钵体滚珠结构(5)通过第二伸缩结构(4)进行支撑;所述第一伸缩结构(3)和第二伸缩结构(4)的推进行程不相等,通过第一伸缩结构(3)和第二伸缩结构(4)使得若干个所述单体钵体滚珠结构(5)模拟不同的地形。
2.根据权利要求1所述的一种ar全地形步行模拟器,其特征在于:所述底座结构包括下底座板(1)和上底座板(2),所述下底座板(1)和上底座板(2)平行设置。
3.根据权利要求2所述的一种ar全地形步行模拟器,其特征在于:所述第一伸缩结构(3)为第一电动推杆,所述第二伸缩结构(4)为第二电动推杆。
4.根据权利要求3所述的一种ar全地形步行模拟器,其特征在于:所述第一伸缩结构(3)的下端套筒部通过螺栓固定安装在下底座板(1)和上底座板(2)之间,其上端伸缩部穿过上底座板(2)并于单体钵体滚珠结构(5)连接。
5.根据权利要求4所述的一种ar全地形步行模拟器,其特征在于:所述第二伸缩结构(4)的下端套筒部通过螺栓固定安装在上底座板(2)上,其山东固安伸缩部与单体钵体滚珠结构(5)连接。
6.根据权利要求1-5任一项所述的一种ar全地形步行模拟器,其特征在于:所述单体钵体滚珠结构(5)包括钵体(501)和转动设置在所述钵体(501)内的滚珠(502),所述钵体(501)的下端固定连接有连接套筒(505),所述连接套筒(505)的下端活动连接在电动推杆的上端;所述钵体(501)呈半球壳状,其内部横向设有转轴(503),所述转轴(503)穿过所述滚珠(502)的中心,且转动的两端转动连接在位于钵体(501)两侧的转轴孔(5012)内;所述连接套筒(505)的上设有驱动滚珠(502)转动的第一驱动机构;且连接套筒(505)的下部设有驱动钵体(501)在电动推杆上转动的第二驱动机构。
7.根据权利要求6所述的一种ar全地形步行模拟器,其特征在于:所述第一驱动机构包括第一马达(508),所述第一马达(508)通过第一马达固定板(509)固定连接在连接套筒(505)的外侧上部;所述第一马达(508)的输出端穿过第一马达固定板(509)并连接有齿轮(504);所述钵体(501)的下端面一侧设有通槽(5011),所述滚珠(502)的表面设有一圈齿槽,所述齿轮(504)的上部穿过通槽(5011)与滚珠(502)上的齿槽啮合传动。
8.根据权利要求7所述的一种ar全地形步行模拟器,其特征在于:所述通槽(5011)的方向和转轴(503)的方向垂直,从而保证滚珠(502)围绕转轴(503)转动。
9.根据权利要求8所述的一种ar全地形步行模拟器,其特征在于:所述第二驱动机构包括第二马达(510),所述第二马达(510)固定安装在第二马达固定板(511)上,所述第二马达固定板(511)的远离第二马达(510)的一侧上部和下部均设有连接耳(5091),上部的所述连接耳(5091)固定连接在连接套筒(505)的外侧,其下部的所述连接耳(5091)呈环状套设在电动推杆的外侧;所述第二马达(510)的输出端穿过第二马达固定板(511)并连接有蜗轮(507),所述电动推杆的上端固定连接有蜗杆(506),所述蜗轮(507)和蜗杆(506)之间啮合传动。
10.根据权利要求9所述的一种ar全地形步行模拟器,其特征在于:所述钵体(501)结构的顶部平台包裹皮革材料,辅助滚珠(502)模拟摩擦力。
技术总结
本技术涉及AR技术领域,且公开了一种AR全地形步行模拟器,包括底座结构和设置在所述底座结构上的若干个单体钵体滚珠结构;若干个所述单体钵体滚珠结构分成两组,两组所述单体钵体滚珠结构均呈矩形阵列状分布;且两组所述单体钵体滚珠结构之间间隔错位排列,使若干个所述单体钵体滚珠结构紧密的排列;一组的所述单体钵体滚珠结构通过第一伸缩结构进行支撑,另一组所述单体钵体滚珠结构通过第二伸缩结构进行支撑;所述第一伸缩结构和第二伸缩结构的推进行程不相等。该AR全地形步行模拟器,利用不同行程的伸缩结构带动若干个单体钵体滚珠上下移动,可以实现模拟人行走在野地,都市,石子路,扶手电梯等具体场景,达到了逼真拟真效果。
技术研发人员:梁源
受保护的技术使用者:梁源
技术研发日:20220927
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!