夹爪取球摩擦带射球装置
本发明涉及取球发球装置,具体涉及夹爪取球摩擦带射球装置。
背景技术:
1、机器人发展已经不只是人们日常生活的助手,已经出现了一些陪伴专业运动和比赛的机器人,以更加科学的训练方法和更加稳定的发挥成为人们娱乐和训练的好伙伴。球类运动的发展也促使着一些应用型机器人在运动领域中发挥更加重要的作用。
2、球类运动,如篮球、足球、排球、乒乓球等运动,在训练运动员时,经常使用发球机对运动员进行高强度训练,同时减少人力等不必要消耗。然而,目前市面上的发球机器人还有一定的不足和改进空间。第一,目前市面上的发球机大多只能发射“小球”,乒乓球、网球等,能够发射篮球,足球的发球机种类较少。第二,基本上所有发球机都必须人工装球,不能做到自动取球并发射。第三,射球频率较慢,足球发球机的发射频率大概为4.5s-8s,发射速度较慢。
3、例如cn 115645882a公开一种捡球发球机器人,捡球和发球比较繁琐,需要通过中介机构实现球的输送然后在发射,结构比较复杂。
技术实现思路
1、本发明为克服现有技术,提供一种夹爪取球摩擦带射球装置。该装置可实现连续的取球射球动作。
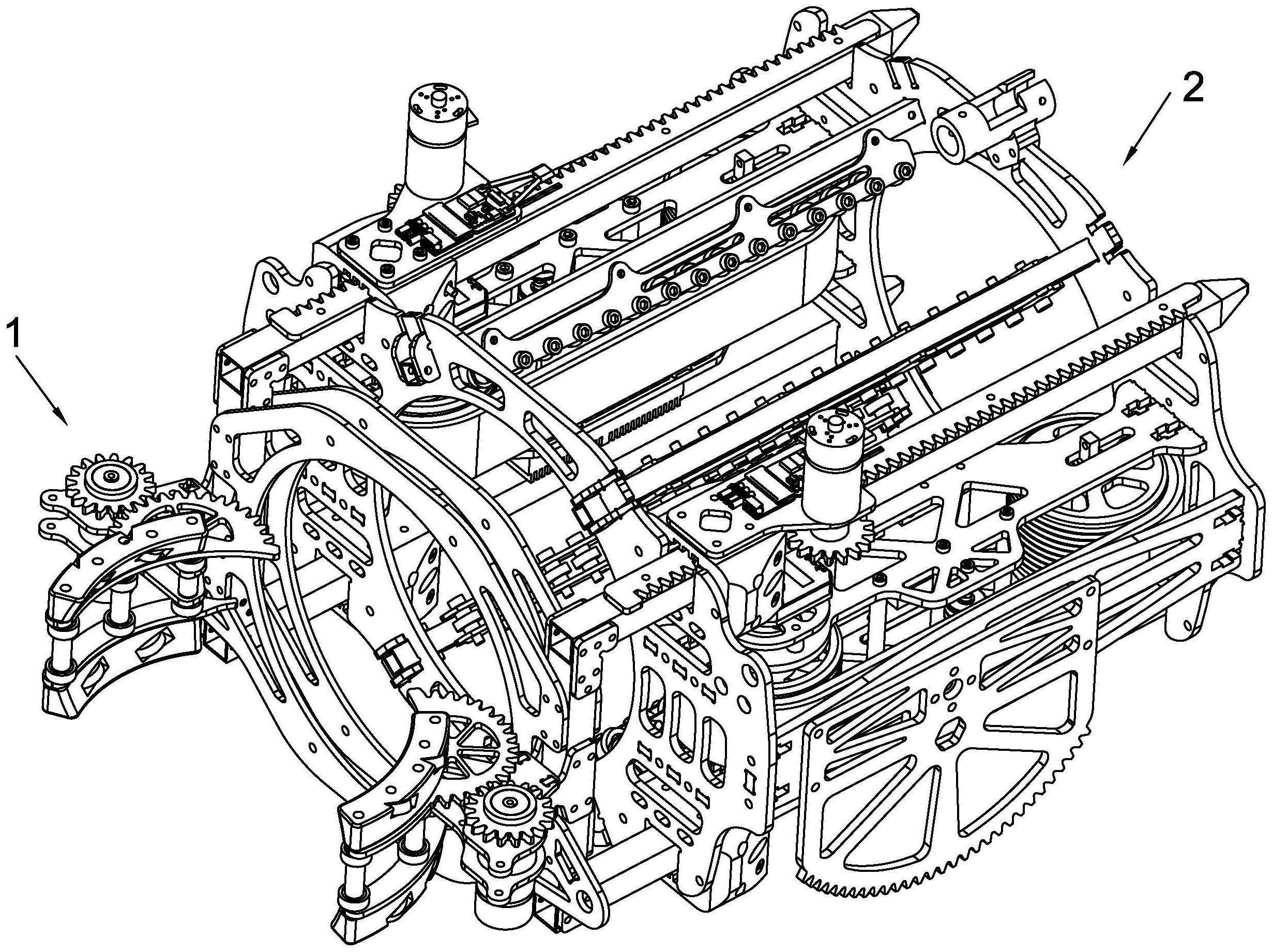
2、夹爪取球摩擦带射球装置包含夹爪取球机构和射球机构;夹爪取球机构可滑动地设置在射球机构上,所述射球机构包含摩擦带发球器、射球框架和链路导向轨;射球框架上对称设置有两个摩擦带发球器,位于每个摩擦带发球器的上下两侧的射球框架上设置有可与球面接触的链路导向轨;
3、每个摩擦带发球器包含电机、固定架、主动轮、从动轮和摩擦带;固定架安装在射球框架上,主动轮由安装在固定架上的电机驱动,从动轮可转动地设置在固定架上,主动轮与从动轮通过可与球面接触的摩擦带传动连接;
4、所述夹爪取球机构包含取球夹爪机构和送球导向机构;送球导向机构与取球夹爪机构相连,并可滑动地设置在射球框架上,夹爪取球机构的入球中心线与射球机构的出球中心线同轴设置。
5、本发明相比现有技术的有益效果是:
6、本发明夹爪取球机构为一体式夹爪取球机构,能够自动完成取球射球动作,并且相对于目前市面上的足球或篮球射球机器有较高的性能改进和功能的增多。第一,有很高的机动性,可以在任何较为平整的地面上移动并且射击。第二,可实现全自动取球射球。第三,射球速度较高,可达2-3s一次,比目前市面上的射球机器有所提升。作为专门的取球射球机器人,没有其他冗余功能,可节省大量成本和重量,可作为同类型射球机器人中的最优选。
7、下面结合附图和实施例对本发明的技术方案作进一步地说明:
技术特征:
1.夹爪取球摩擦带射球装置,包含夹爪取球机构(1)和射球机构(2);其特征在于:夹爪取球机构(1)可滑动地设置在射球机构(2)上,所述射球机构(2)包含摩擦带发球器(a)、射球框架(21)和链路导向轨(20);射球框架(21)上对称设置有两个摩擦带发球器(a),位于每个摩擦带发球器(a)的上下两侧的射球框架(21)上设置有可与球面接触的链路导向轨(20);
2.根据权利要求1所述夹爪取球摩擦带射球装置,其特征在于:所述取球夹爪机构(b1)包含固定板(10)和两套对称布置的夹取机构,每套所述夹取机构包含夹爪(11)、驱动电机(13)、夹爪齿轮(15)和夹爪不完全齿轮(16);驱动电机(13)与固定板(10)相连,驱动电机(13)的输出轴上安装有夹爪齿轮(15),夹爪齿轮(15)与夹爪不完全齿轮(16)啮合,夹爪不完全齿轮(16)和夹爪(11)固定连接,夹爪(11)可转动地设置在固定板(10)上。
3.根据权利要求1所述夹爪取球摩擦带射球装置,其特征在于:所述送球导向机构(b2)包含导向板(17-0)、导向杆(17-1)、导向齿条(17-2)、导向驱动电机(17-3)和导向驱动齿轮(17-4);
4.根据权利要求1所述夹爪取球摩擦带射球装置,其特征在于:所述夹爪取球机构(1)为一体式夹爪取球机构。
5.根据权利要求2所述夹爪取球摩擦带射球装置,其特征在于:每个所述夹爪(11)上设置有分别向上和向下倾斜45°布置的深沟球轴承(14)。
6.根据权利要求2所述夹爪取球摩擦带射球装置,其特征在于:夹爪齿轮(15)和夹爪不完全齿轮(16)的齿数比为2:1。
7.根据权利要求2所述夹爪取球摩擦带射球装置,其特征在于:导向杆(17-1)的材质为pla材料。
8.根据权利要求1所述夹爪取球摩擦带射球装置,其特征在于:电机(24)的输出端安装有增量编码器(29)。
9.根据权利要求1所述夹爪取球摩擦带射球装置,其特征在于:固定架(25)上安装有可转动地辊子(26)。
10.根据权利要求1所述夹爪取球摩擦带射球装置,其特征在于:主动轮(28)和从动轮(22)的间距可调,固定架(25)上具有沿射球方向的长条孔,从动轮(22)的从动轴(22-1)可在长条孔内滑动,从动轴(22-1)的端部具有螺纹孔,螺纹孔和射球框架(21)之间安装有可调节长度的螺栓铜柱。
技术总结
夹爪取球摩擦带射球装置,它包含夹爪取球机构和射球机构;夹爪取球机构可滑动地设置在射球机构上,所述射球机构包含摩擦带发球器、射球框架和链路导向轨;射球框架上对称设置有两个摩擦带发球器,位于每个摩擦带发球器的上下两侧的射球框架上设置有可与球面接触的链路导向轨;每个摩擦带发球器包含电机、固定架、主动轮、从动轮和摩擦带;固定架安装在射球框架上,主动轮由安装在固定架上的电机驱动,从动轮可转动地设置在固定架上,主动轮与从动轮通过可与球面接触的摩擦带传动连接。本发明结构简单,可实现连续的取球射球动作,无需冗余功能,性能稳定可靠。
技术研发人员:赵林杰,路方正,赵立军,张轩溥,高永卓,郑逸杰,周劲松,谭冰池,冯达
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!