基于游戏场景的无人机飞行控制方法、装置及存储介质与流程
本发明涉及无人机飞控,尤其涉及一种基于游戏场景的无人机飞行控制方法、装置及存储介质。
背景技术:
1、现有的无人机飞控交互场景,飞控方式一般为:玩家通过直接视野观察无人机飞行姿态,进行飞行控制操作。或者通过无人机相机拍摄视频实时传输实时画面(包括普通平面屏幕、头戴曲面头盔等),玩家基于实时画面进行飞行控制操作。但是,这两种方式均基于实时画面场景进行飞行控制,无法实现玩家在空旷的地方体验复杂的高楼城市间飞行穿梭,或者在森林中飞行,冲出大气层星际之间穿越的场景体验,并且在真实的高楼、山林复杂真实地形飞控也存在风险,容易造成机器的损失。另外,即使无人机在空旷的场景中飞行,仍然存在不确定性,例如:飞行环境中突然出现真实鸟类,或者玩家在集中关注游戏画面操控无人机俯冲的时候可能会撞击真实地面,无法规避飞控过程中出现的障碍物。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种基于游戏场景的无人机飞行控制方法、装置及存储介质,在游戏场景中嵌入无人机飞控交互,增强了游戏、无人机与玩家之间的交互,增加了游戏趣味性的同时,提升了玩家对无人机的飞控技能。同时通过真实视频回传计算对真实障碍物进行告警规避,有效降低了无人机飞控游戏过程中碰撞真实障碍物的风险。
2、为了实现上述目的,本发明实施例提供了一种基于游戏场景的无人机飞行控制方法,包括:
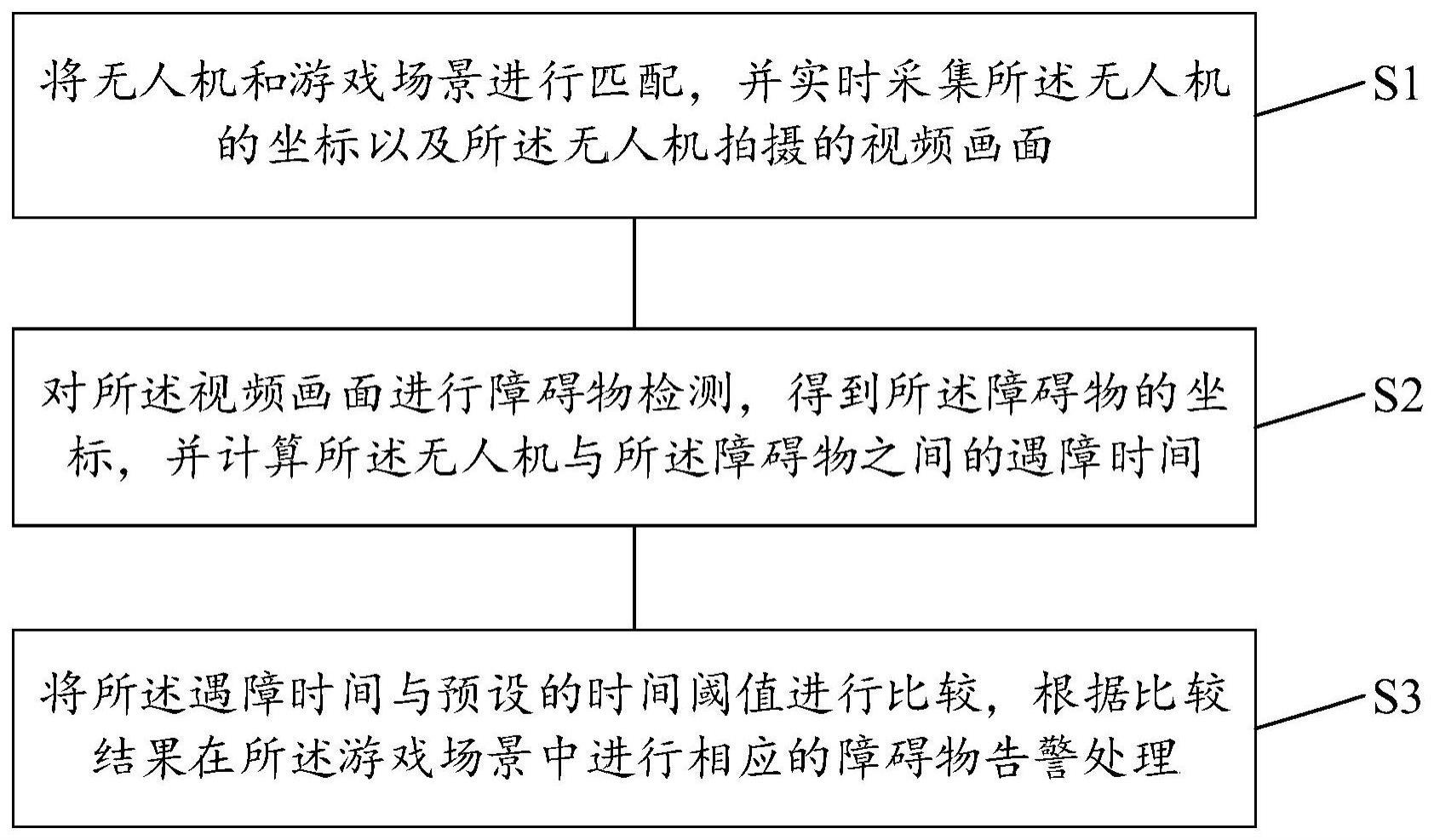
3、将无人机和游戏场景进行匹配,并实时采集所述无人机的坐标以及所述无人机拍摄的视频画面;
4、对所述视频画面进行障碍物检测,得到所述障碍物的坐标,并计算所述无人机与所述障碍物之间的遇障时间;
5、将所述遇障时间与预设的时间阈值进行比较,根据比较结果在所述游戏场景中进行相应的障碍物告警处理。
6、作为上述方案的改进,所述方法还包括:
7、根据预设的坐标系转换规则将所述无人机的相机坐标系转换为所述游戏场景的像素坐标系;
8、其中,所述预设的坐标系转换规则具体为:
9、通过透视投影将所述无人机的相机坐标系转换为所述无人机的图像坐标系;
10、通过伸缩变换和/或平移变换将所述无人机的图像坐标系转换为所述无人机的像素坐标系;
11、通过三角形相似原理将所述无人机的像素坐标系转换为所述游戏场景的像素坐标系。
12、作为上述方案的改进,所述对所述视频画面进行障碍物检测,得到所述障碍物的坐标,并计算所述无人机与所述障碍物之间的遇障时间,具体包括:
13、对所述视频画面进行图像匹配,在左右图像中标记出同一障碍物,得到所述障碍物的左投影坐标和右投影坐标;
14、根据所述左投影坐标和所述右投影坐标,计算得到视差值;
15、通过相似三角形原理根据所述视差值,计算得到所述无人机与所述障碍物之间的距离;
16、根据所述无人机与所述障碍物之间的距离以及速度分量,计算得到所述无人机与所述障碍物之间的遇障时间。
17、作为上述方案的改进,所述无人机与所述障碍物之间的距离的计算公式为:
18、
19、式中,z表示无人机与障碍物之间的距离;t表示左右两个摄像机之间的中心距离;f表示摄像机的焦距;d表示视差值,d=xl-xr,xl表示障碍物的左投影坐标,xr表示障碍物的右投影坐标。
20、作为上述方案的改进,所述预设的时间阈值的获取方法为:
21、获取玩家在所述游戏场景中的历史避障操作数据;
22、对所述历史避障操作数据进行分析,得到所述玩家的最长反应时间、成功避障的最大速度以及成功避障的剩余最短距离;
23、根据所述最长反应时间、所述成功避障的最大速度以及所述成功避障的剩余最短距离,计算得到所述时间阈值。
24、作为上述方案的改进,所述时间阈值的计算公式为:
25、
26、式中,t0表示时间阈值;tmax表示玩家的最长反应时间;lmin表示玩家成功避障的剩余最短距离;vmax表示玩家成功避障的最大速度。
27、作为上述方案的改进,所述根据比较结果在所述游戏场景中进行相应的障碍物告警处理,具体包括:
28、在所述比较结果表征所述遇障时间大于所述预设的时间阈值的情况下,在所述游戏场景中提示无障碍物风险;
29、在所述比较结果表征所述遇障时间等于所述预设的时间阈值的情况下,在所述游戏场景中提示前方存在障碍物风险;
30、在所述比较结果表征所述遇障时间小于所述预设的时间阈值的情况下,在所述游戏场景中提示前方即将碰撞到障碍物。
31、本发明实施例还提供了一种基于游戏场景的无人机飞行控制装置,包括:
32、采集模块,用于将无人机和游戏场景进行匹配,并实时采集所述无人机的坐标以及所述无人机拍摄的视频画面;
33、计算模块,用于对所述视频画面进行障碍物检测,得到所述障碍物的坐标,并计算所述无人机与所述障碍物之间的遇障时间;
34、告警模块,用于将所述遇障时间与预设的时间阈值进行比较,根据比较结果在所述游戏场景中进行相应的障碍物告警处理。
35、本发明实施例还提供了一种基于游戏场景的无人机飞行控制装置,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述的基于游戏场景的无人机飞行控制方法。
36、本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行上述任一项所述的基于游戏场景的无人机飞行控制方法。
37、相对于现有技术,本发明实施例提供的一种基于游戏场景的无人机飞行控制方法、装置及存储介质的有益效果在于:通过将无人机和游戏场景进行匹配,并实时采集所述无人机的坐标以及所述无人机拍摄的视频画面;对所述视频画面进行障碍物检测,得到所述障碍物的坐标,并计算所述无人机与所述障碍物之间的遇障时间;将所述遇障时间与预设的时间阈值进行比较,根据比较结果在所述游戏场景中进行相应的障碍物告警处理。本发明实施例将游戏场景与无人机实时画面进行整合,在游戏场景中嵌入无人机飞控交互,增强了游戏、无人机与玩家之间的交互,增加了游戏趣味性的同时,提升了玩家对无人机的飞控技能。同时对于游戏中无法通过人眼视觉准确识别的真实障碍物,通过真实视频回传计算对真实障碍物进行告警规避,有效降低了无人机飞控游戏过程中碰撞真实障碍物的风险。
技术特征:
1.一种基于游戏场景的无人机飞行控制方法,其特征在于,包括:
2.如权利要求1所述的基于游戏场景的无人机飞行控制方法,其特征在于,所述方法还包括:
3.如权利要求2所述的基于游戏场景的无人机飞行控制方法,其特征在于,所述对所述视频画面进行障碍物检测,得到所述障碍物的坐标,并计算所述无人机与所述障碍物之间的遇障时间,具体包括:
4.如权利要求3所述的基于游戏场景的无人机飞行控制方法,其特征在于,所述无人机与所述障碍物之间的距离的计算公式为:
5.如权利要求4所述的基于游戏场景的无人机飞行控制方法,其特征在于,所述预设的时间阈值的获取方法为:
6.如权利要求5所述的基于游戏场景的无人机飞行控制方法,其特征在于,所述时间阈值的计算公式为:
7.如权利要求6所述的基于游戏场景的无人机飞行控制方法,其特征在于,所述根据比较结果在所述游戏场景中进行相应的障碍物告警处理,具体包括:
8.一种基于游戏场景的无人机飞行控制装置,其特征在于,包括:
9.一种基于游戏场景的无人机飞行控制装置,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,且所述计算机程序被配置为由所述处理器执行,所述处理器执行所述计算机程序时实现如权利要求1至7中任意一项所述的基于游戏场景的无人机飞行控制方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,其中,所述计算机可读存储介质所在设备执行所述计算机程序时,实现如权利要求1至7中任意一项所述的基于游戏场景的无人机飞行控制方法。
技术总结
本发明公开了一种基于游戏场景的无人机飞行控制方法、装置及存储介质,所述方法包括:将无人机和游戏场景进行匹配,并实时采集所述无人机的坐标以及所述无人机拍摄的视频画面;对所述视频画面进行障碍物检测,得到所述障碍物的坐标,并计算所述无人机与所述障碍物之间的遇障时间;将所述遇障时间与预设的时间阈值进行比较,根据比较结果在所述游戏场景中进行相应的障碍物告警处理。本发明在游戏场景中嵌入无人机飞控交互,增强了游戏、无人机与玩家之间的交互,增加了游戏趣味性的同时,提升了玩家对无人机的飞控技能。同时通过真实视频回传计算对真实障碍物进行告警规避,有效降低了无人机飞控游戏过程中碰撞真实障碍物的风险。
技术研发人员:高俊,王朕
受保护的技术使用者:咪咕互动娱乐有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!