一种基于图像传感器的拳击训练设备及训练方法与流程
本发明涉及图像传感器领域,特别涉及一种基于图像传感器的拳击训练设备及训练方法。
背景技术:
1、拳击运动是动作技术等较为细腻的运动。拳击运动员在训练时通常需要教练或拿靶师配合训练。由于教练与拿靶师的风格单一,导致训练效果不理想,无法训练临场应变能力。同时,通过教练或拿靶师配合训练也会耗费人力成本和金钱时间的成本。
2、由于拳击运动员可能会遇到不同的对手,不同对手的风格也不同,导致拳击运动员可能无法适应。因此,对于拳击运动员的训练,存在待改进之处。
技术实现思路
1、本发明的目的在于提供一种基于图像传感器的拳击训练设备及训练方法,以训练运动员的临场应变能力。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
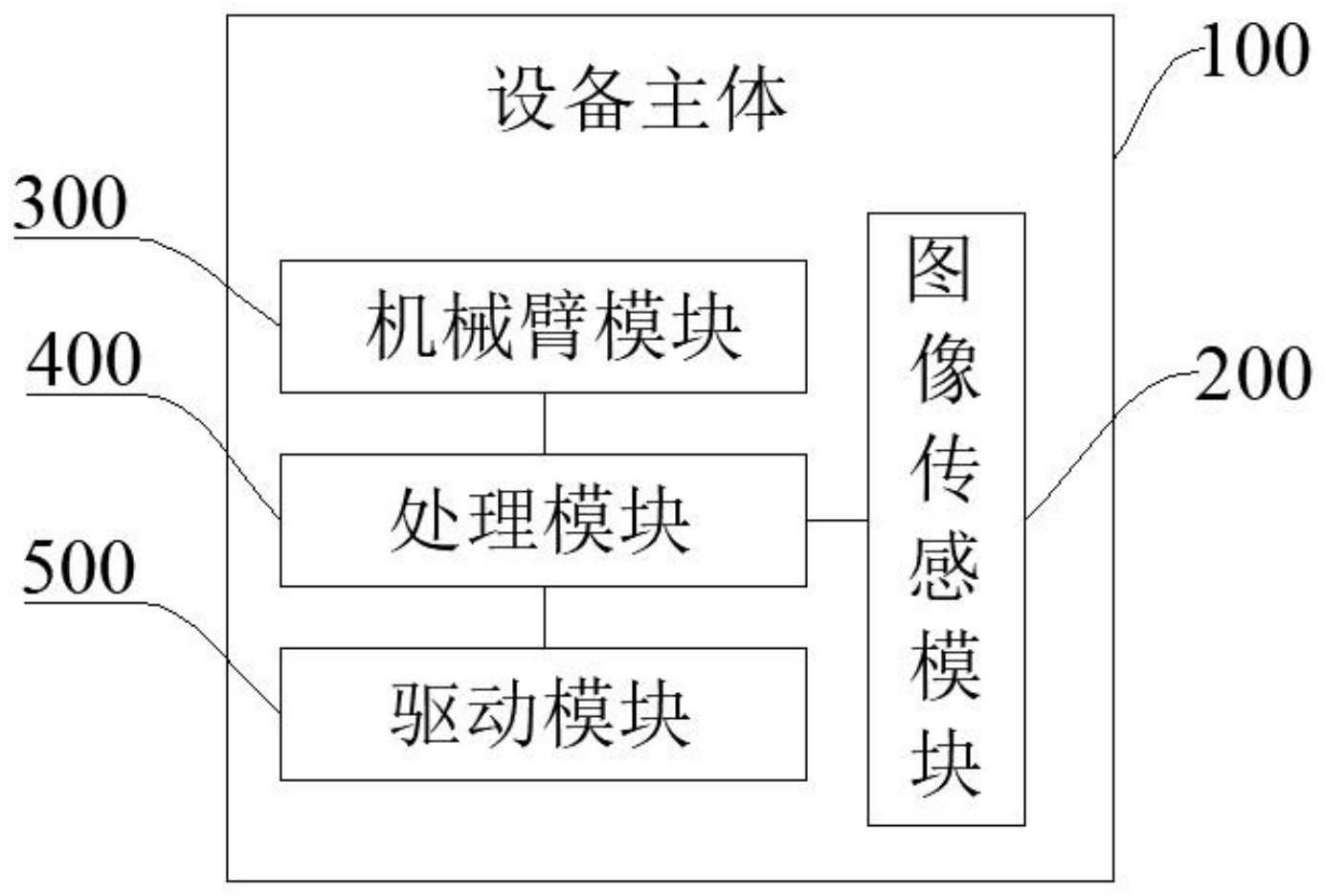
3、本发明提供了一种基于图像传感器的拳击训练设备,包括:
4、设备主体;
5、图像传感模块,设于所述设备主体上,被配置为获取运动员的数据信息、距离数据,所述距离数据表示为所述设备主体与所述运动员的间距;
6、机械臂模块,设于所述设备主体上;以及
7、处理模块,设于所述设备主体内,被配置为根据所述数据信息调节所述机械臂模块的拳击高度数据,并根据所述距离数据与预设距离的比较结果,以进入不同的训练模式。
8、在本发明一实施例中,所述处理模块确定所述距离数据小于所述预设距离时,执行的动作为进入勾摆训练模式。
9、在本发明一实施例中,所述勾摆训练模式被配置为所述机械臂模块使用勾摆拳进行训练,且拳击高度数据在预设高度范围内循环变化。
10、在本发明一实施例中,所述处理模块确定所述距离数据大于或等于所述预设距离时,执行的动作为进入直拳训练模式。
11、在本发明一实施例中,所述直拳训练模式被配置为所述机械臂模块使用直拳进行训练,且拳击高度数据在预设高度范围内循环变化。
12、在本发明一实施例中,所述处理模块确定进入勾摆训练模式或直拳训练模式的训练时长达到预设时长时,执行的动作为进入混合训练模式。
13、在本发明一实施例中,所述混合训练模式被配置为所述机械臂模块循环使用勾摆拳与直拳进行训练,拳击高度数据在预设高度范围内循环变化,距离数据在预设距离范围内循环变化。
14、在本发明一实施例中,还包括驱动模块,所述驱动模块设于所述设备主体上,所述驱动模块被配置为在混合训练模式下,驱动所述设备主体移动,以调节所述距离数据。
15、在本发明一实施例中,所述驱动模块还被配置为根据图像传感模块获取的运动员的位置信息,调整所述设备主体的方向,以保持所述设备主体始终朝向所述运动员。
16、本发明还提供了一种基于图像传感器的拳击训练方法,包括:
17、获取运动员的数据信息;
18、根据所述数据信息,调节机械臂模块的拳击高度数据;
19、实时获取设备主体与所述运动员之间的距离数据,并根据所述距离数据与预设距离的比较结果,以进入不同的训练模式
20、如上所述,本发明提供一种基于图像传感器的拳击训练设备及训练方法,能够通过cmos图像传感器识别运动员的位置信息,以使训练设备执行相应的拳击动作。同时,训练设备能够在训练过程中执行不同的拳击动作,能够有效训练运动员的临场应变能力。
21、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于图像传感器的拳击训练设备,其特征在于,包括:
2.根据权利要求1所述的基于图像传感器的拳击训练设备,其特征在于,所述处理模块确定所述距离数据小于所述预设距离时,执行的动作为进入勾摆训练模式。
3.根据权利要求2所述的基于图像传感器的拳击训练设备,其特征在于,所述勾摆训练模式被配置为所述机械臂模块使用勾摆拳进行训练,且拳击高度数据在预设高度范围内循环变化。
4.根据权利要求1所述的基于图像传感器的拳击训练设备,其特征在于,所述处理模块确定所述距离数据大于或等于所述预设距离时,执行的动作为进入直拳训练模式。
5.根据权利要求4所述的基于图像传感器的拳击训练设备,其特征在于,所述直拳训练模式被配置为所述机械臂模块使用直拳进行训练,且拳击高度数据在预设高度范围内循环变化。
6.根据权利要求1所述的基于图像传感器的拳击训练设备,其特征在于,所述处理模块确定进入勾摆训练模式或直拳训练模式的训练时长达到预设时长时,执行的动作为进入混合训练模式。
7.根据权利要求6所述的基于图像传感器的拳击训练设备,其特征在于,所述混合训练模式被配置为所述机械臂模块循环使用勾摆拳与直拳进行训练,拳击高度数据在预设高度范围内循环变化,距离数据在预设距离范围内循环变化。
8.根据权利要求1所述的基于图像传感器的拳击训练设备,其特征在于,还包括驱动模块,所述驱动模块设于所述设备主体上,所述驱动模块被配置为在混合训练模式下,驱动所述设备主体移动,以调节所述距离数据。
9.根据权利要求8所述的基于图像传感器的拳击训练设备,其特征在于,所述驱动模块还被配置为根据图像传感模块获取的运动员的位置信息,调整所述设备主体的方向,以保持所述设备主体始终朝向所述运动员。
10.一种基于图像传感器的拳击训练方法,其特征在于,包括:
技术总结
本发明提供了一种基于图像传感器的拳击训练设备及训练方法,包括:设备主体;图像传感模块,设于所述设备主体上,被配置为获取运动员的数据信息、距离数据,所述距离数据表示为所述设备主体与所述运动员的间距;机械臂模块,设于所述设备主体上;以及处理模块,设于所述设备主体内,被配置为根据所述数据信息调节所述机械臂模块的拳击高度数据,并根据所述距离数据与预设距离的比较结果,以进入不同的训练模式。通过本发明提供的一种基于图像传感器的拳击训练设备及训练方法,能够训练运动员的临场应变能力。
技术研发人员:李亚林,刘正,范春辉,张志存,蒋飞飞,伍凯,杨洋
受保护的技术使用者:合肥海图微电子有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!