智能捡拾机器人控制系统、控制方法和智能捡拾机器人与流程
本发明涉及智能捡拾乒乓球,具体为智能捡拾机器人控制系统、控制方法和智能捡拾机器人。
背景技术:
1、拾球机构的目的是将乒乓球从地面拾起,送入储球箱中,乒乓球为塑料材质,质量较轻,现在有的手动拾球设备多采用弹性网,如图1所示,当网接触球时,由于受力,使网变形,球就进入到网的另一侧,达到收集乒乓球的目的,这种拾球方式一般和储球结合,有的是直接将弹性网做成滚轮结构,有的是采用底部为弹性网的盒子,但是,这种储球方式需要使网变形足够大才能使球到达网后,若受力过小,使网不能达到有效的形变,则会影响收集效率,而加大受力,会增加拾球机的功率,节能效果变差;
2、另外一种针对球形的有效拾取方式就是采用滚轮收集,滚轮结构如图2所示;在一个光滚筒外侧,安装有针型挡板,挡板的宽度按球的外形尺寸设计;滚轮和拾球机的驱动装置连接,当驱动装置前进时,滚轮逆时针滚动;当乒乓球在滚轮前方时,受挡板作用,将乒乓球从地面拾取,送入后面的储球装置中;
3、综上所述,如何研制一种智能捡拾机器人控制系统、控制方法和智能捡拾机器人,成为目前待解决的问题。
技术实现思路
1、本发明的目的在于提供智能捡拾机器人控制系统、控制方法和智能捡拾机器人,以解决以上的问题。
2、为达到以上目的,提供以下技术方案:
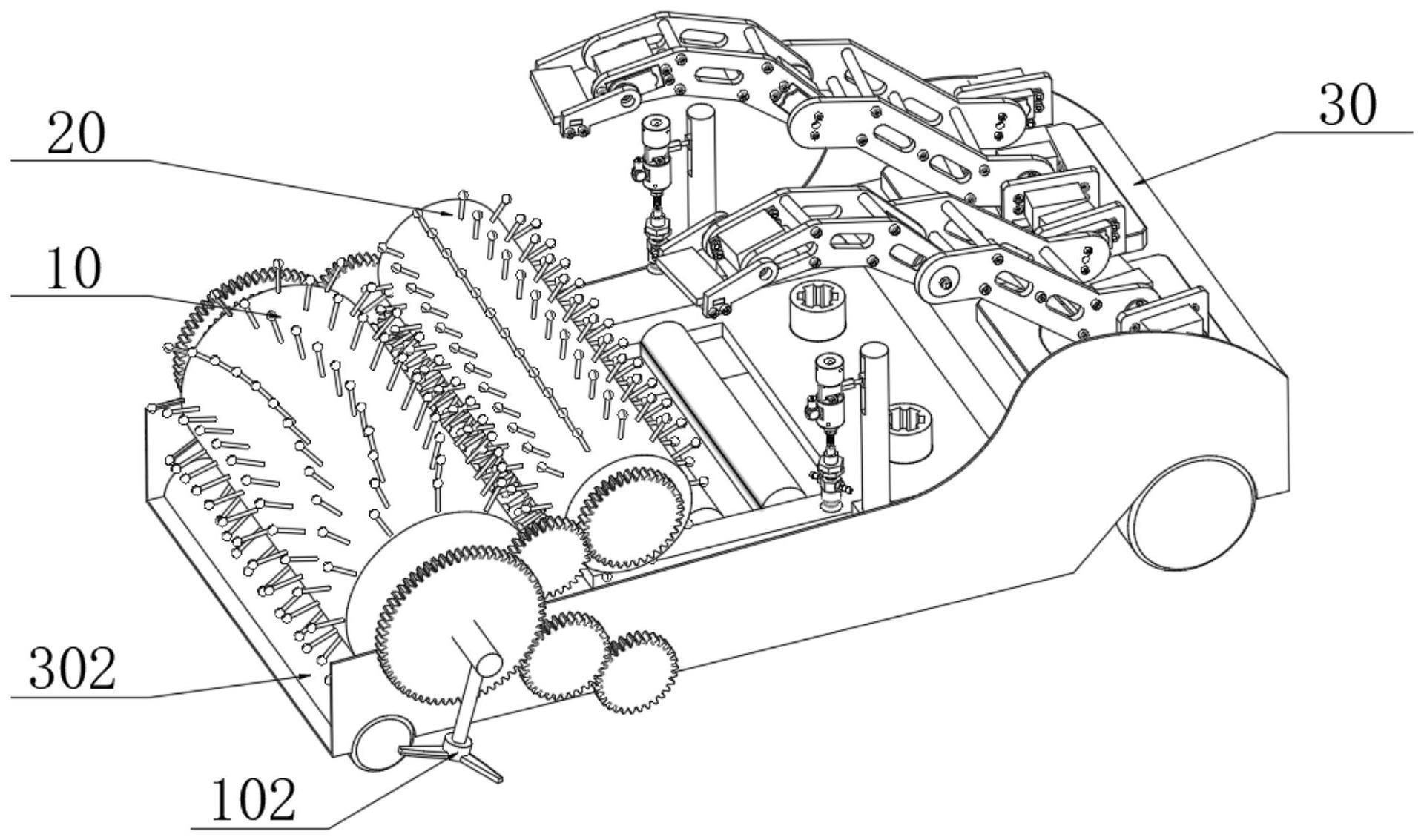
3、智能捡拾机器人,与乒乓球配合使用,包括:第一辊体、第二辊体、主动捡拾机构与车体,所述车体的内壁还设有伺服电机,所述伺服电机贯穿车体的一侧壁,并传动连接有齿轮,所述第一辊体的两端套设有齿轮,且所述第一辊体上的齿轮与伺服电机上的齿轮直接和/或间接啮合连接,进而所述伺服电机可通过驱动齿轮带动第一辊体转动,所述第一辊体还通过齿轮直接和/或间接与第二辊体啮合连接,进而带动第二辊体转动,所述第一辊体与第二辊体的直径不同,进而所述智能捡拾机器人可通过第一辊体与第二辊体之间的相对转动捡拾乒乓球,并带动乒乓球进入车体。
4、优选地,所述第一辊体与第二辊体之间依次啮合连接有偶数个齿轮,进而所述第一辊体与第二辊体的转动方向相反,所述第一辊体和第二辊体均为圆柱形结构,所述第一辊体和第二辊体的侧壁上分别沿其径向向外延伸设置有一定数量的第一凸起与第二凸起,所述第一凸起与第二凸起均包括圆柱形结构的连接部与固定于连接部上呈圆球形结构的收集部,所述第一凸起与第二凸起均为可弹性变形的材质,所述第一凸起与第二凸起收集部的刚性均小于的连接部的刚性。
5、优选地,所述第一凸起以一定间隔地呈弧形排列环设于第一辊体上,每个所述第一凸起均与其对应位置的第一辊体外表面法线相平行,进而每排弧形设置的第一凸起的收集部朝向向弧线的朝向弯曲设置。
6、优选地,所述相邻两排弧形设置的第一凸起之间的间距大于乒乓球的直径,所述每排弧形设置的第一凸起之间的间距小于乒乓球的直径,进而所述乒乓球可被限位于相邻两排弧形设置的第一凸起之间的空隙中。
7、优选地,所述第二凸起阵列环设于第二辊体上,所述每排第二凸起之间的间距与每排弧形设置的第一凸起之间的间距相同,且所述第二凸起的位置与所述第一凸起的位置相对应,进而所述第一辊体带动第二辊体运动时,所述乒乓球可由第一凸起之间的空隙转移至相邻两排第二凸起之间的空隙中。
8、优选地,所述车体还包括用于移动的走行轮,所述车体靠近第一辊体的一端开口设置,且沿其内表面向第一辊体的方向延伸设有凸出部,所述凸出部为半圆柱形结构,用于防止车体内的乒乓球掉出车体,所述第一辊体的两端还固定连接有转刷,所述转刷包括转刷轴与套设于其一端的转刷体,所述转刷体绕其周向以固定间隔向其外侧凸出设置,所述转刷体凸出部分之间的空间配置为可限位乒乓球,所述乒乓球可与转刷体的凸出部分抵接并限位于转刷体内,限位于转刷体内的乒乓球可和/或不可沿转刷体的径向向转刷体的一侧运动;
9、其中,不可向转刷体运动的乒乓球对应与转刷体凸出部分沿中心点靠近转刷体的一侧相抵接;
10、所述转刷体的一端沿转刷轴的径向固定于转刷体中,且所述转刷体具有绕转刷轴轴向转动的自由度,所述转刷轴远离转刷体的一端沿第一辊体的外法线方向固定连接于第一辊体套设齿轮的一侧,进而所述转刷可被第一辊体带动并绕第一辊体的中轴线做圆周运动,用于收集车体两侧的乒乓球。
11、优选地,所述主动捡拾机构包括主动整理机构与主动吸附机构,所述主动整理机构对称固定于车体的后侧,用于整理乒乓球,所述主动吸附机构对称固定连接于车体的左右两侧,用于吸附乒乓球,所述主动整理机构与主动吸附机构均可绕其自身中轴线转动,其中,所述主动整理机构和主动吸附机构转动至任一角度时,所述主动整理机构和主动吸附机构沿竖直方向向车体内表面上的投影均不与其他主动整理机构和主动吸附机构沿竖直方向向车体内表面上的投影相重合。
12、优选地,所述主动捡拾机构为多轴机械臂,所述主动吸附机构为带有弹性部件且可升降的吸附机械手,所述车体还包括置物板,所述置物板配置为将车体分隔成上下两层,所述车体的下层空间中沿竖直方向安装有升降组件,所述升降组件包括电机与设有外螺纹的轴套,所述置物板上开设有螺纹孔,进而所述置物板可被升降组件带动升降,所述置物板上还开设有用于通过乒乓球的通孔,进而所述乒乓球可通过通孔进入车体下层空间中,所述多轴机械臂包括一定数量的转动节,每节所述转动节可独立进行枢转运动,用于将第二辊体上的乒乓球导引至置物板上,所述吸附机械手可通过力传感器对弹性部件进行受力检测,用于判断吸附机械手是否吸附到乒乓球以及检测对乒乓球的吸附力。
13、本发明还提供了一种控制上述智能捡拾机器人的系统,包括:at89s52单片机,以及与at89s52单片机电性连接的自动循迹控制系统、红外自动避障检测电路、电机驱动电路、储球桶检测与报警电路,所述红外自动避障检测电路包括设置于车体上的红外反射式传感器,所述电机驱动电路包括设置于车体上的驱动电机与转向电机,所述储球桶检测与报警电路包括设置于车体上的红外对射式传感器与警报器。
14、本发明还提供了一种上述控制系统控制智能捡拾机器人的方法,包括以下步骤:s1:开始;s2:关闭中断;s3:判断障碍物方向,并定义障碍物方向为左前方、正前方、右前方中的一种;s4:绕过障碍物;s5:前进;s6:返回主程序;s7:结束。
15、本发明的有益效果为:
16、1.本发明通过第一辊体与第二辊体不同的直径,智能捡拾机器人可通过第一辊体与第二辊体之间的转速差实现将乒乓球从第一辊体移送至第二辊体上,并由第二辊体带动至车体中,从而实现捡拾乒乓球操作;
17、2.本发明通过不同材质的连接部与收集部的设置,收集部在使用过程中的位移更大,乒乓球可被收集部挂扫带动,并进入到刚性更高的连接部形成的空隙之间,进而乒乓球被限位,实现乒乓球的收集操作;
18、3.本发明通过与第一辊体外表面法线相平行设置的第一凸起,乒乓球可逐渐沿第一凸起弧形排列的弧线朝向进入第一辊体内侧,有利于乒乓球的收集。
技术特征:
1.智能捡拾机器人,与乒乓球配合使用,其特征在于:包括:第一辊体、第二辊体、主动捡拾机构与车体,所述车体的内壁还设有伺服电机,所述伺服电机贯穿车体的一侧壁,并传动连接有齿轮,所述第一辊体的两端套设有齿轮,且所述第一辊体上的齿轮与伺服电机上的齿轮直接和/或间接啮合连接,进而所述伺服电机可通过驱动齿轮带动第一辊体转动,所述第一辊体还通过齿轮直接和/或间接与第二辊体啮合连接,进而带动第二辊体转动,所述第一辊体与第二辊体的直径不同,进而所述智能捡拾机器人可通过第一辊体与第二辊体之间的相对转动捡拾乒乓球,并带动乒乓球进入车体。
2.根据权利要求1所述的智能捡拾机器人,其特征在于:所述第一辊体与第二辊体之间依次啮合连接有偶数个齿轮,进而所述第一辊体与第二辊体的转动方向相反,所述第一辊体和第二辊体均为圆柱形结构,所述第一辊体和第二辊体的侧壁上分别沿其径向向外延伸设置有一定数量的第一凸起与第二凸起,所述第一凸起与第二凸起均包括圆柱形结构的连接部与固定于连接部上呈圆球形结构的收集部,所述第一凸起与第二凸起均为可弹性变形的材质,所述第一凸起与第二凸起收集部的刚性均小于的连接部的刚性。
3.根据权利要求2所述的智能捡拾机器人,其特征在于:所述第一凸起以一定间隔地呈弧形排列环设于第一辊体上,每个所述第一凸起均与其对应位置的第一辊体外表面法线相平行,进而每排弧形设置的第一凸起的收集部朝向向弧线的朝向弯曲设置。
4.根据权利要求3所述的智能捡拾机器人,其特征在于:所述相邻两排弧形设置的第一凸起之间的间距大于乒乓球的直径,所述每排弧形设置的第一凸起之间的间距小于乒乓球的直径,进而所述乒乓球可被限位于相邻两排弧形设置的第一凸起之间的空隙中。
5.根据权利要求4所述的智能捡拾机器人,其特征在于:所述第二凸起阵列环设于第二辊体上,所述每排第二凸起之间的间距与每排弧形设置的第一凸起之间的间距相同,且所述第二凸起的位置与所述第一凸起的位置相对应,进而所述第一辊体带动第二辊体运动时,所述乒乓球可由第一凸起之间的空隙转移至相邻两排第二凸起之间的空隙中。
6.根据权利要求5所述的智能捡拾机器人,其特征在于:所述车体还包括用于移动的走行轮,所述车体靠近第一辊体的一端开口设置,且沿其内表面向第一辊体的方向延伸设有凸出部,所述凸出部为半圆柱形结构,用于防止车体内的乒乓球掉出车体,所述第一辊体的两端还固定连接有转刷,所述转刷包括转刷轴与套设于其一端的转刷体,所述转刷体绕其周向以固定间隔向其外侧凸出设置,所述转刷体凸出部分之间的空间配置为可限位乒乓球,所述乒乓球可与转刷体的凸出部分抵接并限位于转刷体内,限位于转刷体内的乒乓球可和/或不可沿转刷体的径向向转刷体的一侧运动;
7.根据权利要求6所述的智能捡拾机器人,其特征在于:所述主动捡拾机构包括主动整理机构与主动吸附机构,所述主动整理机构对称固定于车体的后侧,用于整理乒乓球,所述主动吸附机构对称固定连接于车体的左右两侧,用于吸附乒乓球,所述主动整理机构与主动吸附机构均可绕其自身中轴线转动,其中,所述主动整理机构和主动吸附机构转动至任一角度时,所述主动整理机构和主动吸附机构沿竖直方向向车体内表面上的投影均不与其他主动整理机构和主动吸附机构沿竖直方向向车体内表面上的投影相重合。
8.根据权利要求7所述的智能捡拾机器人,其特征在于:所述主动捡拾机构为多轴机械臂,所述主动吸附机构为带有弹性部件且可升降的吸附机械手,所述车体还包括置物板,所述置物板配置为将车体分隔成上下两层,所述车体的下层空间中沿竖直方向安装有升降组件,所述升降组件包括电机与设有外螺纹的轴套,所述置物板上开设有螺纹孔,进而所述置物板可被升降组件带动升降,所述置物板上还开设有用于通过乒乓球的通孔,进而所述乒乓球可通过通孔进入车体下层空间中,所述多轴机械臂包括一定数量的转动节,每节所述转动节可独立进行枢转运动,用于将第二辊体上的乒乓球导引至置物板上,所述吸附机械手可通过力传感器对弹性部件进行受力检测,用于判断吸附机械手是否吸附到乒乓球以及检测对乒乓球的吸附力。
9.一种控制权利要求8所述的智能捡拾机器人的系统,其特征在于:包括:at89s52单片机,以及与at89s52单片机电性连接的自动循迹控制系统、红外自动避障检测电路、电机驱动电路、储球桶检测与报警电路,所述红外自动避障检测电路包括设置于车体上的红外反射式传感器,所述电机驱动电路包括设置于车体上的驱动电机与转向电机,所述储球桶检测与报警电路包括设置于车体上的红外对射式传感器与警报器。
10.一种权利要求9所述的控制系统控制智能捡拾机器人的方法,其特征在于:包括以下步骤:s1:开始;s2:关闭中断;s3:判断障碍物方向,并定义障碍物方向为左前方、正前方、右前方中的一种;s4:绕过障碍物;s5:前进;s6:返回主程序;s7:结束。
技术总结
本发明涉及智能捡拾乒乓球技术领域,具体为智能捡拾机器人控制系统、控制方法和智能捡拾机器人,包括:第一辊体、第二辊体、主动捡拾机构与车体,车体的内壁还设有伺服电机,伺服电机贯穿车体的一侧壁,并传动连接有齿轮,第一辊体的两端套设有齿轮,且第一辊体上的齿轮与伺服电机上的齿轮直接和/或间接啮合连接,进而伺服电机可通过驱动齿轮带动第一辊体转动,第一辊体还通过齿轮直接和/或间接与第二辊体啮合连接,进而带动第二辊体转动,本发明通过第一辊体与第二辊体不同的直径,智能捡拾机器人可通过第一辊体与第二辊体之间的转速差实现从第一辊体被移送至第二辊体上,并由第二辊体带动至车体中,从而实现捡拾乒乓球操作。
技术研发人员:张诗勖
受保护的技术使用者:张诗勖
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!