一种计数健腹轮及计数方法与流程
本发明属于健腹轮,涉及一种计数健腹轮及计数方法。
背景技术:
1、目前市面上的健腹轮,大部分不带计数功能。少部分带计数功能的健腹轮,采用或旋转编码器、或加速度计、或霍尔传感器来实现计数方式。由于霍尔传感器的成本较低,故大多数带计数的健腹轮产品,采用霍尔传感器来实现计数。其中,以三霍尔传感器计数为主。
2、三霍尔传感器实现的计数方案,在硬件和结构上较为复杂,势必会带来较高的生产研发难度。如何减少结构复杂度,提高系统可靠性,降低系统成本的同时,并降低生产研发难度成了亟需解决的难题。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种计数健腹轮及计数方法,通过双传感器实现的计数方案,硬件走线少、结构干涉少、电子器件少。
2、为了实现上述目的,本发明采用了以下技术方案:
3、一种计数健腹轮,包括:
4、触发部,所述触发部安装于健腹轮的滚轮上,所述触发部与滚轮同步转动;
5、第一传感器和第二传感器,所述第一传感器和第二传感器分别安装于健腹轮的固定座上,所述第一传感器和第二传感器均用于感应触发部;
6、中控模块,所述中控模块分别于第一传感器和第二传感器电性连接,所述中控模块用于依据第一传感器和第二传感器的电信号计数;
7、其中,所述第一传感器和第二传感器之间的夹角小于180度,当所述触发部位于第一传感器和第二传感器的夹角间时,所述第一传感器和第二传感器能同时感应到触发部。
8、进一步的,所述触发部具有4个区域位置状态,当触发部位于第一区域位置状态时,只有第一传感器能感应到触发部;
9、当触发部位于第一传感器和第二传感器的夹角间时处于第二区域位置状态,所述第一传感器和第二传感器能同时感应到触发部;
10、当触发部位于第三区域位置状态时,只有第二传感器能感应到触发部;
11、当触发部位于第四区域位置状态时,所述第一传感器和第二传感器均不能感应到触发部。
12、进一步的,所述触发部为磁性件,所述第一传感器和第二传感器为霍尔传感器。
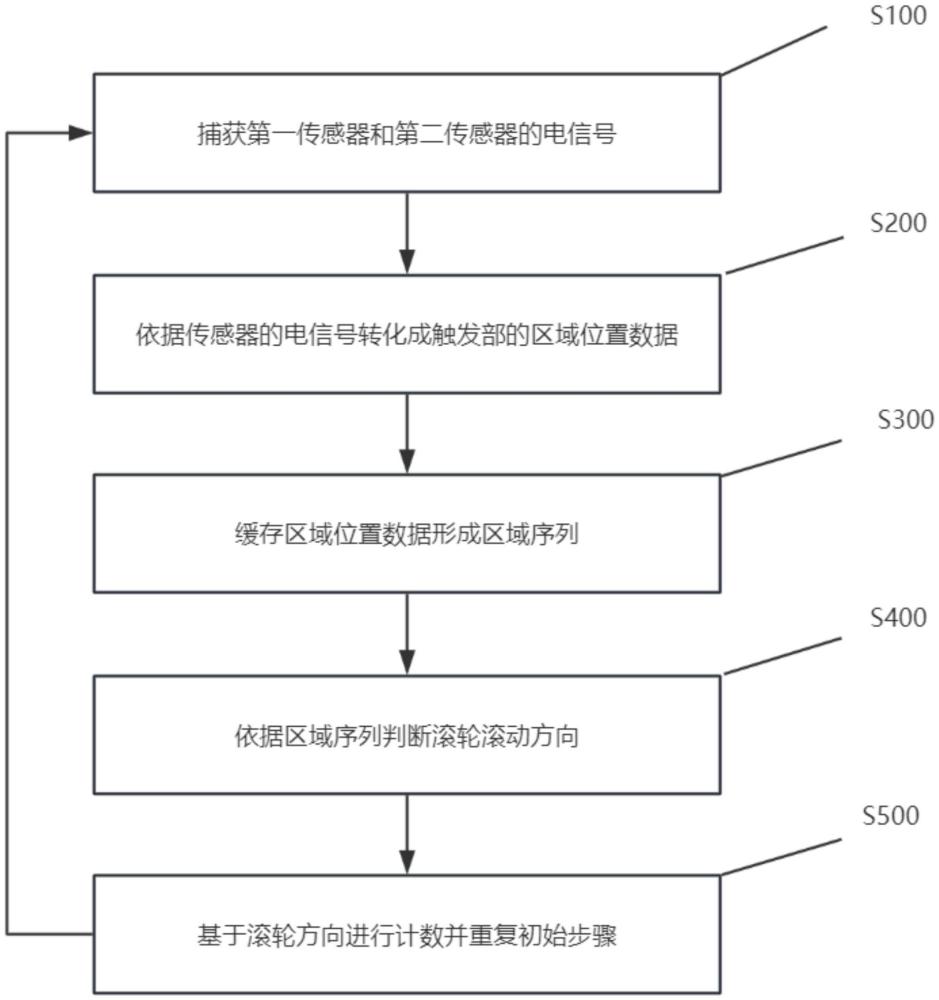
13、本发明的另一技术方案,一种计数方法,应用于上述述的健腹轮,包括以下步骤:
14、捕获第一传感器和第二传感器的电信号;
15、依据传感器的电信号转化成触发部的区域位置数据;
16、缓存区域位置数据形成区域序列;
17、依据区域序列判断滚轮滚动方向;
18、基于滚轮方向进行计数并重复初始步骤。
19、进一步的,所述依据传感器的电信号转化成触发部的区域位置数据具体包括:
20、若第一传感器输出高电平、第二传感器输出低电平,则触发部的区域位置数据为1;
21、若第一传感器输出高电平、第二传感器输出高电平,则触发部的区域位置数据为2;
22、若第一传感器输出低电平、第二传感器输出高电平,则触发部的区域位置数据为3;
23、若第一传感器输出低电平、第二传感器输出低电平,则触发部的区域位置数据为4。
24、进一步的,所述依据区域序列判断滚轮滚动方向包括以下步骤:
25、若区域序列的区域位置数据少于3个,则重复初始步骤;
26、若区域序列的区域位置数据大于等于3个,则取最新的3个区域位置数据组成实时区域序列;
27、识别实时区域序列中区域位置数据的顺序,判断滚轮滚动方向生成滚轮方向数据。
28、进一步的,所述基于滚轮方向进行计数包括:
29、获取初始方向数据和当前运动方向数据进行比对;
30、若初始运动方向数据与当前运动方向数据相同,则不进行计数,并重复初始步骤;
31、若初始运动方向数据与当前运动方向数据相反,则计数+1,并重复初始步骤。
32、进一步的,所述获取初始方向数据和当前运动方向数据进行比对包括以下步骤:
33、搜寻初始方向数据;
34、若不存在初始方向数据,则滚轮方向数据标定为初始方向数据,并重复初始步骤;
35、若存在,则滚轮方向数据标定为当前运动方向数据,将当前运动方向数据与初始方向数据进行比对。
36、应用本发明的技术方案,简化了计数过程的状态数,从算法上能够更简单。由于计数过程的状态数少,每个状态对应的区域广,因此受外界影响,如瞬间扰动时,能有很好的抗干扰性。在硬件和结构设计上,由于少了一个传感器,一定程度上能够降低系统设计的复杂度。且通过4个区域位置状态,特别是同时触发两个传感器的第二区域位置状态,极大的提高了抗干扰性和方向判断的准确性。
37、发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种计数健腹轮,其特征在于,包括:
2.据权利要求1所述计数健腹轮,其特征在于,所述触发部具有4个区域位置状态,当触发部位于第一区域位置状态时,只有第一传感器能感应到触发部;
3.根据权利要求1所述计数健腹轮,其特征在于,所述触发部为磁性件,所述第一传感器和第二传感器为霍尔传感器。
4.一种计数方法,应用于权利要求1-3任一所述的健腹轮,其特征在于,包括以下步骤:
5.根据权利要求4所述计数方法,其特征在于,所述依据传感器的电信号转化成触发部的区域位置数据具体包括:
6.根据权利要求4所述计数方法,其特征在于,所述依据区域序列判断滚轮滚动方向包括以下步骤:
7.根据权利要求6所述计数方法,其特征在于,所述基于滚轮方向进行计数包括:
8.根据权利要求7所述计数方法,其特征在于,所述获取初始方向数据和当前运动方向数据进行比对包括以下步骤:
技术总结
本发明属于健腹轮技术领域,涉及一种计数健腹轮及计数方法,所述健腹轮,包括:触发部,所述触发部安装于健腹轮的滚轮上,所述触发部与滚轮同步转动;第一传感器和第二传感器,所述第一传感器和第二传感器分别安装于健腹轮的固定座上,所述第一传感器和第二传感器均用于感应触发部;中控模块,所述中控模块分别于第一传感器和第二传感器电性连接,所述中控模块用于依据第一传感器和第二传感器的电信号计数;其中,所述第一传感器和第二传感器之间的夹角小于180度,当所述触发部位于第一传感器和第二传感器的夹角间时,所述第一传感器和第二传感器能同时感应到触发部。
技术研发人员:郑涛,汪洋,孙昕,谢远军,彭星星
受保护的技术使用者:珠海云麦科技有限公司
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!