一种骑跨式步行训练装置
本发明属于康复医疗辅具器械,具体涉及一种骑跨式步行训练装置。
背景技术:
1、肢体功能障碍者通过手术或者药物无法完全康复,因此康复机器人逐渐走进人们的生活中,下肢康复机器人也作为治疗的一部分。
2、下肢康复机,以减重功能为主,辅助老年人完成基本的步行训练帮助其恢复下肢功能。基于所要实现的功能要求,目前该研究领域内主要有以下几种机构设计:
3、提拉式下肢康复机,该类辅具通过置于患者腋下的长杆将患者抬起或是翘起,亦或是用固定在患者身上的吊带将患者吊起从而实现减重功能。该设计的优点是结构简单且减重效果直观,但存在着安全性不高的问题,患者在辅具工作过程中会承受较大负担。
4、外骨骼式下肢康复机,该类辅具通过置于患者腿部的机械结构来控制患者下肢运动,可以实现减重的功能。该设计的优点是运行稳定且占地空间小,但也存在一些问题,如造价高昂、与患者关节固定不够贴合等问题。最关键在于机构与人体运动的不协调会直接导致患者腿部关节疼痛。
5、骑跨式下肢康复机,该类辅具通过置于患者胯下的坐杆将患者抬起实现减重功能,座椅抬升方式多用直升式或单杆转动抬升。该设计的优点是不会对患者作用较大负担且结构简单,缺点是运动效率低下,抬升机构占地空间较大且助行动作不足。
6、综上所述,目前产品存在运动效率低、占地空间大、对患者身体负担较大等普遍问题。
技术实现思路
1、鉴于以上现有技术的缺点,本发明的目的在于提供一种骑跨式步行训练装置,能够减轻患者运动负担,有效提升训练效果和舒适度,保证训练安全,且占地空间小,适合不同人群多种场景的使用。
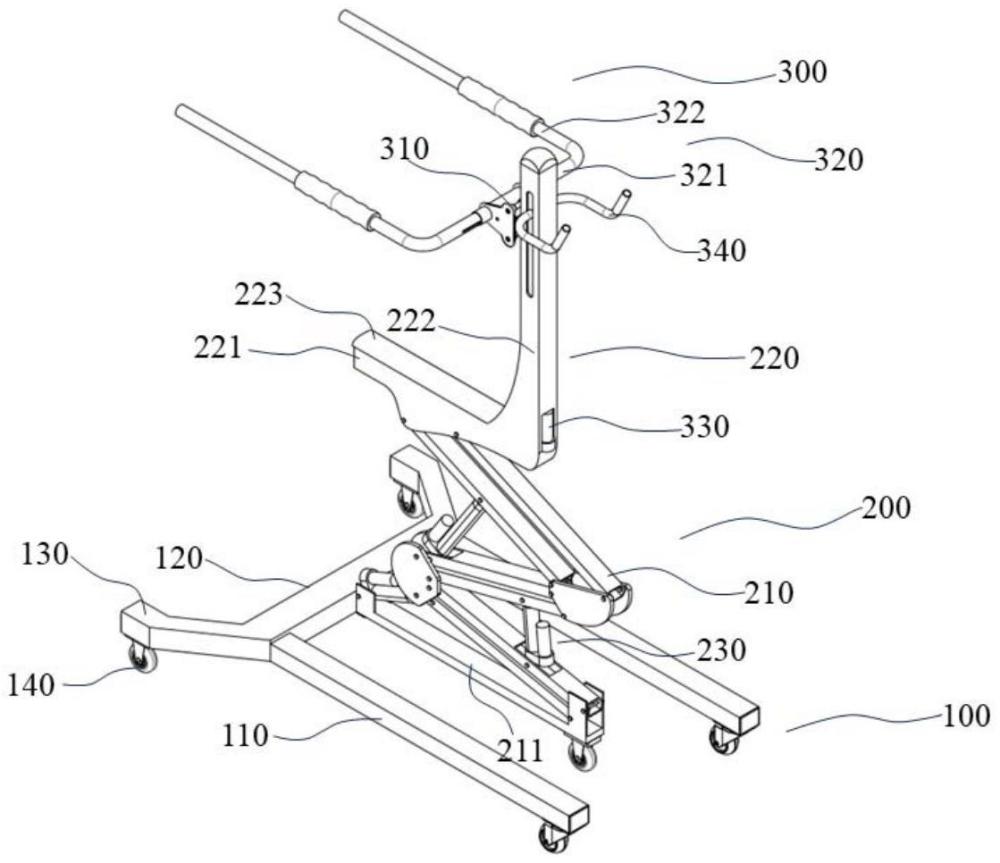
2、为实现上述目的及其它相关目的,本发明提出一种骑跨式步行训练装置,包括:
3、底座,设置于第一运动平面上;
4、减重机构,设置于第二运动平面,所述第二运动平面垂直或近似垂直于所述第一运动平面;
5、上身保护机构,连接于所述减重机构远离所述底座的一侧,其包括扶手组件,所述扶手组件在第三运动平面内左右往复运动或往复转动,所述第三运动平面垂直于所述第一运动平面与所述第二运动平面;
6、其中,所述减重机构固定于所述底座,所述上身保护机构还包括扶手驱动组件,所述扶手组件连接于所述扶手驱动组件,并在所述扶手驱动组件的驱动下于所述第三运动平面内左右往复移动,或于所述第三运动平面内从水平位置向两侧往复转动;
7、或所述减重机构转动连接于所述底座,所述扶手组件固定于所述减重机构,所述减重机构在动力驱动下相对所述底座转动进而带动所述扶手组件于所述第三运动平面内相对所述底座进行一定角度的往复转动;
8、或所述减重机构转动连接于所述底座,且所述上身保护机构还包括扶手驱动组件,所述扶手组件在所述扶手驱动组件驱动下的移动或转动方向与所述减重机构的转动偏移方向相互配合。
9、根据本发明提供的一实施例,所述减重机构包括:
10、调节组件,连接于所述底座;
11、支撑组件,连接于所述调节组件远离所述底座的一端,在所述调节组件的作用下于所述第二运动平面内实现水平方向和/或竖直方向的移动;
12、驱动组件,连接于所述调节组件和/或所述底座和/或所述支撑组件上。
13、根据本发明提供的一实施例,所述调节组件包括:
14、连接杆,连接于所述底座;
15、两个平行设置的第一连杆,其一端转动连接于所述连接杆;
16、第一固定件,转动连接于两个所述第一连杆远离所述连接杆的一端;
17、两个平行设置的第二连杆,转动连接于所述第一固定件;
18、第二固定件,转动连接于两个所述第二连杆远离所述第一固定件的一端;
19、两个平行设置的第三连杆,转动连接于所述第二固定件;
20、所述支撑组件转动连接于两个所述第三连杆远离所述第二固定件的一端,在所述第二运动平面内,所述驱动组件驱动所述支撑组件以实现平移。
21、根据本发明提供的一实施例,所述支撑组件包括:
22、水平支撑架,转动连接于两个所述第三连杆远离所述第二固定件的一端,所述水平支撑架上设置有坐垫;
23、竖直支撑架,设置于所述水平支撑架上。
24、根据本发明提供的一实施例,所述坐垫与所述水平支撑架之间通过弹性件连接。
25、根据本发明提供的一实施例,所述上身保护机构还包括竖直驱动组件,其连接于所述扶手驱动组件或所述扶手组件,并与所述竖直支撑架滑动连接或转动连接,所述竖直驱动组件驱动所述扶手驱动组件和/或所述扶手组件在所述第二运动平面内相对所述竖直支撑架移动或转动。
26、根据本发明提供的一实施例,所述扶手组件包括:
27、抬升杆,连接于所述扶手驱动组件或所述竖直驱动组件,并垂直于所述第二运动平面;
28、支撑扶手,连接于所述抬升杆,并对称分布于所述抬升杆两侧。
29、根据本发明提供的一实施例,所述扶手驱动组件包括:
30、第一连接件,连接于所述竖直驱动组件或所述竖直支撑架;
31、滑动连接件,滑动连接于所述第一连接件,且垂直于所述第二运动平面;
32、第二连接件,连接于所述滑动连接件,且对称分布于所述滑动连接件两侧;
33、第五驱动件,其一端固定于所述第一连接件,另一端连接于所述第二连接件,且平行于所述滑动连接件;
34、所述抬升杆连接于所述第二连接件,所述第五驱动件驱动所述滑动连接件和所述第二连接件沿轴向往复运动,并带动所述抬升杆在所述第三运动平面内相对所述第一连接件沿水平方向往复运动。
35、根据本发明提供的一实施例,所述连接杆与所述底座转动连接,且在连接处设置有角度限位器,以对所述调节组件产生的偏移运动进行限位。
36、根据本发明提供的一实施例,还包括支撑架和分布于所述支撑架两侧的助行机构,所述支撑架固定于所述减重机构,两组所述助行机构通过绑带与所述支撑架上的滑轮组相互连接,两组所述助行机构通过所述绑带相互拉动。
37、本发明的骑跨式步行训练装置,利用减重机构及其支撑组件上对下身提供有效的支撑减重,减轻患者运动负担;上身保护机构辅助实现上身支撑并通过其左右位移带动患者重心变化以辅助患者行走,减重机构与底座之间随患者行走能够进行一定角度的偏移配合重心移动,符合人体运动规律,有效辅助患者迈步实现更好的训练效果;减重机构与上身保护机构高度均可调节,能够适应不同人群及不同运动姿态,配合移动滚轮的控制能够实现患者各种活动;各部件结构简单易于加工,部件之间配合简单,易于拆卸进行维修清理,保证结构强度的同时节约成本,且占地空间小,能够适应多种使用场合。
技术特征:
1.一种骑跨式步行训练装置,其特征在于,包括:
2.根据权利要求1所述的骑跨式步行训练装置,其特征在于,所述减重机构包括:
3.根据权利要求2所述的骑跨式步行训练装置,其特征在于,所述调节组件包括:
4.根据权利要求3所述的骑跨式步行训练装置,其特征在于,所述支撑组件包括:
5.根据权利要求4所述的骑跨式步行训练装置,其特征在于,所述坐垫与所述水平支撑架之间通过弹性件连接。
6.根据权利要求4所述的骑跨式步行训练装置,其特征在于,所述上身保护机构还包括竖直驱动组件,其连接于所述扶手驱动组件或所述扶手组件,并与所述竖直支撑架滑动连接或转动连接,所述竖直驱动组件驱动所述扶手驱动组件和/或所述扶手组件在所述第二运动平面内相对所述竖直支撑架移动或转动。
7.根据权利要求6所述的骑跨式步行训练装置,其特征在于,所述扶手组件包括:
8.根据权利要求7所述的骑跨式步行训练装置,其特征在于,所述扶手驱动组件包括:
9.根据权利要求3所述的骑跨式步行训练装置,其特征在于,所述连接杆与所述底座转动连接,且在连接处设置有角度限位器,以对所述调节组件产生的偏移运动进行限位。
10.根据权利要求1所述的骑跨式步行训练装置,其特征在于,还包括支撑架和分布于所述支撑架两侧的助行机构,所述支撑架固定于所述减重机构,两组所述助行机构通过绑带与所述支撑架上的滑轮组相互连接,两组所述助行机构通过所述绑带相互拉动。
技术总结
本发明提出一种骑跨式步行训练装置,包括底座、减重机构和上身保护机构,上身保护机构提供上身保护的同时能够进行水平方向的位移,辅助患者进行重心偏移以实现辅助行走;减重机构为骑跨式减重机构,在行走时提供有效的支撑减重;减重机构与底座连接处设置有角度限位器和转动阻尼器,在行走训练时减重机构能够进行一定角度的偏移转动配合人体重心转移并保持稳定,提升训练效果;同时减重机构和上身保护机构能够进行竖直方向的位移来进行高度调节以适应不同体态需求,整个装置为一个整体,稳定性高,安全性强,舒适度高,减重效果好,且符合人体运动规律,训练效果更好。
技术研发人员:王勇,夏宇辰,曹大迪,穆景颂,陈品,刘正士
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!