一种全自动板材切割装置的横切方法
1.本发明属于板材加工领域,涉及一种全自动板材切割装置的横切方法。
背景技术:
2.目前市场上,木门厂家生产复合木门部分采用了全自动生产线,而能够实现全自动生产的前提是工人必须首先要安装好完整木门的结构,而木门组装前,必须要人工手工将料切好,再进行组装,前期的复合填充板准备,目前都是用手工切锯来进行,需要工人拿卷尺或者其他测量工具进行测量,然后对复合填充板进行对齐,由操作人员手推完成门料的切割,门的框架组装方木以及复合板门皮,都是需要人工手推台锯进行切割,现有的这种方式效率较低,需要大量的人工去配合生产,本发明有效地解决了这种问题。
技术实现要素:
3.本发明为了克服现有技术的不足,提供一种全自动板材切割装置的横切方法。
4.1.为了实现上述目的,本发明采用以下技术方案:一种全自动板材切割装置的横切方法,其特征在于:利用全自动板材切割装置对板材进行切割,全自动板材切割装置包括主控系统、上料装置、横切装置、废料装置、运输装置、纵切装置以及成品板材运输装置,主控系统分别与上料装置、横切装置、运输装置、废料装置、纵切装置以及成品板材运输装置连接并控制各装置的运行,具体包括以下步骤:
5.步骤1:全自动板材切割装置预处理;
6.步骤1.1:pc下发加工数据至主控系统;
7.步骤1.1:依次启动各装置,确认各装置运行正常;
8.步骤2:上料装置上料;
9.步骤3:横切装置横切板材;
10.步骤4:运输装置将横切后板材输送至纵切装置;
11.步骤5:纵切装置纵切板材;
12.步骤6:成品板材运输装置运输成品板材。
13.进一步的;所述上料装置包括上料框架、上料横移机构、上料升降机构、上料夹紧机构以及报警装置,横切装置包括横切前传送机构以及横切机构,横切前传送机构包括横切框架、横切前输送组件、横切前推料组件和横切前定位靠山组件,横切机构包括横切框架、横切压紧组件、横切横移组件、横切升降组件以及横切组件,运输装置包括运输框架、防掉料机构、料定位靠山机构和横切后传送机构,纵切装置包括纵切前传送机构以及纵切机构,纵切前传送机构包括纵切前框架、纵切前输送组件、纵切前侧推组件以及纵切前推料组件,纵切机构包括纵切框架、纵切压紧组件、纵切横移组件、纵切升降组件、纵切组件以及侧对齐组件。
14.进一步的;所述步骤2中上料装置上料步骤如下:步骤2.1:确认取料区是否有料,若是,执行步骤2.2,若否,在取料区备料,备料后执行步骤2.1;
15.步骤2.2:确认上料装置是否掉料,若否,执行步骤2.3,若是,上料装置的上料横移机构、上料升降机构返回至初始位置,上料装置的报警装置报警,人工处理后执行步骤2.1;
16.步骤2.3:上料装置将板材移动至横切装置的待放料区,等待接收主控系统允许上料指令;
17.步骤2.4:上料装置接收主控系统允许上料指令,上料装置将板材将板材下降至放料位置,将板材放置在横切装置,完成板材的上料工序。
18.进一步的;步骤3中横切装置横切板材的步骤如下:
19.步骤3.1:横切前定位靠山组件将板材定位;
20.横切前定位靠山组件的横切前定位靠山气缸启动将固设在其输出端的横切前定位靠山顶出,横切前输送组件的横切前传送电机启动输送板材,横切前定位靠山组件的定位靠山料到位传感器检测感应到料后,横切前传送电机停止,将板材进行定位;
21.步骤3.2:料定位靠山机构根据板材加工尺寸定位板材;
22.步骤3.3:板材推料处理;
23.步骤3.4:横切压紧组件的横切前压紧构件和横切后压紧构件启动将板材切料的前后区域进行固定;
24.步骤3.5:横切横移组件、横切升降组件以及横切组件启动,横切割片切割板材;
25.步骤3.6:板材余料尺寸计算;
26.步骤3.7:判定下一次加工尺寸是否大于板材余料尺寸,若否,执行步骤3.8,若是,执行步骤3.9,
27.步骤3.8:板材余料横切加工;
28.步骤3.9:主控系统判定板材余料尺寸,若板材余料尺寸>5cm,执行步骤3.9.1;若板材余料尺寸《5cm,执行步骤3.9.2。
29.进一步的;所述步骤3.3中板材推料处理包括以下步骤:
30.步骤3.3.1:基础数据设定;
31.设定板材的初始宽度为w,横切前推料组件的前推料构件的前推料气缸原点与横切割片之间的距离为sf,前推料构件的长度补偿为bf,横切前推料组件的后推料构件的后推料气缸原点与横切割片之间的距离为sr,横切前定位靠山组件与横切割片之间的距离为sz,横切前定位靠山组件的长度补偿为bz,横切割片的补偿为db,当前板材后端与横切割片之间的距离设为sa,板材余料尺寸设为y
h0
;
32.初始上料阶段:sa=w+db+sz+bz、y
h0
=w;
33.步骤3.3.2:运输装置的防掉料机构45启动;
34.步骤3.3.3:主控系统根据基础数据选择后推料构件或前推料构件推料;
35.当sf+bf《sa《sr,主控系统控制后推料构件推料,执行步骤3.3.3.1;
36.当sa《sf,主控系统控制前推料构件推料,执行步骤3.3.3.2;
37.步骤3.3.4:主控系统控制启动横切前输送组件和横切后传送机构42,使板材与料定位靠山机构对齐。
38.进一步的;所述步骤3.3.3.1设为后推料构件推料:
39.主控系统控制后推料构件进行推料动作,将板材推动至料定位靠山机构进行定位,料定位靠山机构的料定位靠山传感器感应到料到位时,停止推料,后推料构件返回至原
点;
40.所述步骤3.3.3.2设为前推料构件推料;
41.主控系统控制前推料构件进行推料动作,将板材推动至料定位靠山机构进行定位,料定位靠山机构的料定位靠山传感器感应到料到位时,停止推料,前推料构件返回至原点。进一步的;设定所述料定位靠山机构位于初始位置时,料定位靠山机构的料定位靠山气缸原点与横切组件的横切割片之间的距离为hor,目标横切加工尺寸设定为t
hn
,料定位靠山伺服电机控制料定位靠山机架,相当于料定位靠山压板434的实际行走距离为m
hn
,n指横切加工次数,n≥1,t
h1
指第一次加工尺寸、t
h2
指第二次加工尺寸...t
hn
指第n次加工尺寸,各加工尺寸的数值根据需要设定,m
h1
指第一次加工时料定位靠山伺服电机控制料定位靠山机架的实际行走距离、m
h2
指第二次加工时料定位靠山伺服电机控制料定位靠山机架的实际行走距离...m
hn
指第n次加工时料定位靠山伺服电机控制料定位靠山机架的实际行走距离,得到公式:
42.m
hn
=ho
r-t
hn
;
43.定位靠山伺服电机控制料定位靠山压板移动m
hn
,料定位靠山气缸控制料定位靠山压板下降。
44.进一步的;经切割的所述板材的余料尺寸设为y
hm
,m指切割次数,m≥1,y
h1
指经一次切割的板材余料尺寸、y
h2
指经二次切割的板材余料尺寸...y
hm
指经m次切割的板材余料尺寸,n与m数值一致,主控系统根据t
h1
进行第一次加工,得到一次切割的板材余料尺寸y
h1
,根据t
hn
进行第n次加工,得到m次切割的板材余料尺寸y
hm
,y
hm
=y
h0-(t
h1
+t
h2
+...+t
hn
)-(db×
n)。
45.进一步的;步骤3.9包括以下步骤:
46.步骤3.9.1:主控系统控制上料装置上料,余料尺寸y'
hm
=y
hm
+w',w'指下一次上料的板材初始宽度,执行步骤2;
47.步骤3.9.2:防掉料机构复位,废料装置启动,前推料构件将余料推送至排废料区,废料掉落至废料装置,将废料排出,主控系统控制上料装置上料,执行步骤2。
48.进一步的;所述步骤5中纵切装置纵切板材的步骤如下:
49.步骤5.1:纵切前输送组件的纵切前传输构件将板材传输至纵切放料区,纵切平台有料传感器感应到料后,纵切前传输构件停止传输,纵切前输送组件的纵切前升降构件控制纵切前传输构件下降将板材放置在纵切前框架的纵切平台上;
50.步骤5.2:纵切前侧推组件推动板材使板材侧边靠齐;
51.步骤5.3:纵切前推料组件启动将板材推送至纵切的切割位;
52.步骤5.4:纵切机构对板材进行纵切操作;
53.步骤5.5:下一次加工尺寸大于板材余料尺寸时,板材余料尺寸等同于切割余量,纵切前推料组件将切割余料推送至成品板材运输装置;
54.步骤5.6:主控系统控制运输装置将横切后的板材输送至纵切前传送机构完成上料操作,执行步骤5.1。
55.综上所述,本发明的有益之处在于:
56.本发明设计主控系统、上料装置、横切装置、运输装置、纵切装置以及成品板材运输装置实现板材上料、横切、运输、纵切、成品运输的自动化协同配合,实现更大程度上的自
动化,减少人工成本,且大大提高了生产效率,另外,将板材切割尺寸输入主控系统,根据板材切割尺寸主控系统控制各装置的运行,相较于人工采用卷尺或者其他测量工具进行测量,板材切割更加精确,效率更高。
57.本发明将不小于设定值的余料与下一次上料的板材作为整体,以用于后续的推料切料操作,将小于设定值的余料推送至排废料区,在保证质量的同时提高余料的利用率,降低了成本和耗损。
附图说明
58.图1为本发明的装置示意图。
59.图2为本发明的上料装置示意图。
60.图3为本发明的上料横移机构以及上料升降机构内部示意图。
61.图4为图2中a的放大示意图。
62.图5为本发明的横切装置示意图。
63.图6为图5中y方向的示意图。
64.图7为图5中方向的示意图。
65.图8为本发明运输装置的示意图。
66.图9为本发明运输装侧视图。
67.图10为本发明的纵切装置示意图。
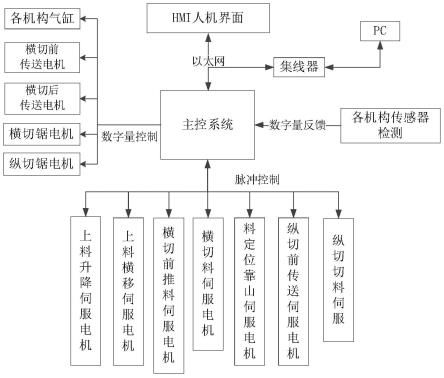
68.图11为本发明的主控系统与其他设备连接示意图。
69.图12为本发明的自动切割流程示意图。
70.图13为本发明横切装置的横切流程示意图。
71.图14为本发明纵切装置的纵切流程示意图。
具体实施方式
72.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
73.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
74.本发明实施例中所有方向性指示(诸如上、下、左、右、前、后、横向、纵向
……
)仅用于解释在某一特定姿态下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
75.实施例一:
76.如图1-10所示,一种全自动板材切割装置,包括主控系统、上料装置1、横切装置2、运输装置4、纵切装置5以及成品板材运输装置6,主控系统分别与上料装置1、横切装置2、运
输装置4、纵切装置5以及成品板材运输装置6连接并控制各装置的运行,上料装置1将待加工板材移动至横切装置2进行横切,运输装置4位于横切装置2和纵切装置5之间,将经横切装置2切割的板材输送至纵切装置5进行纵切,成品板材运输装置6输送经纵切装置5切割的成品板材。
77.本发明还提供了一种用于全自动板材切割装置的上料装置,所述上料装置1包括上料框架11、上料横移机构12、上料升降机构13以及上料夹紧机构14,上料横移机构12安装在上料框架11,并相对上料框架11做横移运动,具体来说,上料横移机构12包括上料横移滑轨122和上料横移齿条121,上料横移滑轨122和上料横移齿条121固设在上料框架11的横梁,上料横移滑轨122设置有两组,两组上料横移滑轨122上下对称沿上料框架11的长度方向分布,上料横移齿条121与上料横移滑轨122平行设置且位于两组上料横移滑轨122之间,上料横移滑轨122上滑动设置有上料横移板120,上料横移板120上固设有上料横移伺服电机123,上料横移伺服电机123与主控系统连接,主控系统控制上料横移伺服电机123,上料横移伺服电机123的输出轴固设有横移齿轮(图未显示),横移齿轮与上料横移齿条121啮合连接,上料横移伺服电机123启动带动上料横移板120通过上料横移滑轨122沿上料框架11的横梁做横移运动,将待加工板材从取料区移动至横切装置2。
78.上料升降机构13包括上料升降立柱131,上料升降立柱131与上料框架11的横梁呈垂直或近似垂直设置,上料升降立柱131与上料横移板120滑动连接,上料升降立柱131固设有上料升降齿条132,上料横移板120固设有上料升降伺服电机134,上料升降伺服电机134与主控系统连接,主控系统控制上料升降伺服电机134,上料升降伺服电机134的输出轴固设有上料升降齿轮(图未标识),上料升降齿轮与上料升降齿条132啮合连接,上料升降伺服伺服电机134启动带动上料升降立柱131向下滑动将上料夹紧机构14移动至待加工板材所在的位置,便于后续上料夹紧机构14夹紧待加工板材工序,上料升降机构13还包括料到位开关(图未显示),料到位开关与主控系统连接,主控系统与pc通信连接,可在界面进行操作,料到位开关用于控制待加工板材与上料升降机构13的距离,提高上料夹紧机构14与待加工板材位置的精确度,便于对待加工板材的夹紧。
79.上料夹紧机构14固设在上料升降机构13,上料夹紧机构14包括上料夹紧连杆141,上料夹紧连杆141的两端固设有上料夹紧固定板142,上料夹紧固定板142两端固设有上料夹紧气缸143,上料夹紧气缸143与主控系统连接,主控系统控制上料夹紧气缸143,上料夹紧气缸143还固设有上料传感器(图未显示),上料传感器用于检测无上料夹紧机构14是否有料,上料传感器与主控系统连接,主控系统根据上料传感器的反馈控制上料装置1的运动,若发生掉料或者料未抱夹成功,上料传感器为检测到有料,主控系统控制上料横移机构12、上料升降机构13自动返回至初始位置,上料夹紧气缸143的输出轴固设有上料夹紧板144,如图2所示,上料夹紧机构14在待加工板材的两侧将待加工板材夹紧。
80.上料装置1还包括报警装置15,本实施例中报警装置15固设在上料框架11的横梁上,报警装置15与主控系统连接,若发生掉料或者料未抱夹成功,主控系统控制报警装置15报警进行人工处理。
81.本实施例中上料装置1的实施过程如下,待加工板材放置在取料区,上料横移机构12、上料升降机构13位于初始位置,主控系统控制上料横移机构12移动至取料区;到达位置后,主控系统控制上料升降机构13下降,当上料升降机构13触发料到位开关,上料夹紧气缸
143启动,上料夹紧板144将待加工板材夹紧,上料升降机构13通过上料夹紧机构14将待加工板材提升至可移动区域,上料横移机构12启动,将待加工板材移动至横切装置2的上料区域,上料升降机构13将待加工板材下降至横切装置2的待放料区;上料装置1接收横切装置2允许上料指令后,上料升降机构13将待加工板材继续下降至放料位置,将上料夹紧气缸143松开,将待加工板材放置在横切装置2,主控系统控制上料升降机构13及上料横移机构12依次返回至初始位置,完成未加工板材的上料工序;放料完成后,上料装置1接收主控系统判断是否继续上料,若继续上料,则重复上述动作,将未加工板材从取料区移动至待放料区,等待接收主控系统允许上料指令,期间若发生掉料或者料未夹紧成功,上料传感器判断没料,主控系统控制上料横移机构12及上料升降机构13自动返回至初始位置,并通过报警装置15报警,等待人工处理,当人工处理完成后,点击继续上料指令,上料装置1则继续运行上料步骤,从而确保设备安全稳定生产。
82.本发明还提供了一种用于全自动板材切割装置的横切装置,所述横切装置2包括横切前传送机构以及横切机构,横切前传送机构与上料装置1对接,上料装置1将未加工板材从取料区移动至横切前传送机构进行输送,横切前传送机构包括横切框架200、横切前输送组件、横切前推料组件和横切前定位靠山组件,横切前输送组件、横切前推料组件和横切前定位靠山组件分别固设在横切框架200,横切前输送组件将未加工板材输送至横切前定位靠山组件位置保证未加工板材对齐并防止未加工板材传送时打滑,横切前推料组件将定位后的未加工板材推送至横切位置通过横切机构横切,实现板材的横切。
83.横切前输送组件包括两组横切前传动轴211,两组横切前传动轴211分别转动设置在横切框架200的两端,横切前传动轴211上固设有若干横切前输送轮212,两组横切前传动轴211上对应的横切前输送轮212通过传送带动力连接,任一组横切前传动轴211上固设有横切前传动轮213,横切框架200上固设有横切前传送电机215,横切前传送电机215与主控系统连接,主控系统控制横切前传送电机215,横切前传送电机215的输出轴固设有横切前传送轮215,横切前传动轮213与横切前传送轮215通过传送带动力连接,实现横切前传送电机215的动力传输,横切前传送电机215启动控制两组横切前传动轴211转动,实现两组横切前传动轴211间的传送带传输,上料装置1将未加工板材从取料区放置在传送带上,传送带带动未加工板材从横切前输送组件的输入端向横切前输送组件的输出端移动。
84.横切前定位靠山组件设置有若干,且固设在横切框架200的输出端,横切前定位靠山组件包括横切前定位靠山气缸241,横切前定位靠山气缸241与主控系统连接,主控系统控制横切前定位靠山气缸241,横切前定位靠山气缸241固设在横切框架200上,横切前定位靠山气缸241的输出端固设有横切前定位靠山242,横切前定位靠山气缸241启动将横切前定位靠山242顶出,使横切前定位靠山242与未加工板材相抵进行定位,横切前定位靠山组件还包括定位靠山料到位传感器(图未标识),定位靠山料到位传感器与主控系统连接,定位靠山料到位传感器用于检测横切前传送电机215是否将板材输送到位,定位靠山料到位传感器感应到料后,横切前传送电机215停止并返回至原点位置。
85.横切前推料组件设置有若干,且固设在横切框架200,若干横切前推料组件通过横切前推料伺服(图未显示)驱动,控制若干横切前推料组件同步运动,横切前推料组件包括横切前推料固定杆230,横切前推料固定杆230设置有前推料构件232和后推料构件231,前推料构件232和后推料构件231相对横切前推料固定杆230滑动连接,前推料构件232和后推
料构件231结构和功能相似,本实施例以后推料构件231为例进行说明,后推料构件231包括后推料气缸233,后推料气缸233的输出轴固设有后推料推板234,后推料气缸233将后推料推板234顶升,横切前推料伺服电机驱动横切前推料组件并通过后推料推板234或前推料推板推动板材,横切前推料组件还设置有横切前推料拖链235,横切前推料组件移动时通过横切前推料拖链235进行限制,一方面控制横切前推料组件的移动行程,另一方面可保证横切前推料组件移动的稳定性。
86.横切装置2还包括横切张紧机构,横切张紧机构用于控制横切前输送组件的传送带张紧程度,横切张紧机构包括横切张紧板224,横切张紧板224设为l型结构,横切张紧板224包括第一成型板(图未标识)和第二成型板(图未标识),第一成型板与横切框架200固设连接,第一成型板上固设有横切张紧滑动槽222,横切张紧滑动槽222内滑动设置有横切张紧块223,横切张紧块223与一组横切前传动轴211转动连接,第二成型板上通过螺母固设有横切张紧杆221,横切张紧杆221与横切张紧块223固设连接,通过调节螺母进而控制横切张紧块223在横切张紧滑动槽222的位置,进而调节横切前输送组件的传送带张紧程度。
87.横切机构包括横切框架201、横切压紧组件、横切横移组件、横切升降组件以及横切组件,横切组件安装在横切升降组件,横切压紧组件压紧板材,横切横移组件以及横切升降组件控制横切组件移动便于切割。
88.横切横移组件通过横切横移框架202固设在横切框架201,横切横移框架202固设在横切框架201,横切横移组件包括横切料伺服电机261以及横切料传送机构262,横切料伺服电机261与主控系统连接,主控系统控制横切料伺服电机261,横切料伺服电机261固设在横切横移框架202,横切料传送机构262包括横切料传送带263,横切料伺服电机261驱动横切料传送机构262传送,横切升降组件与横切料传送带263固设连接,为保证横切升降组件横移过程中的稳定性,横切升降组件与横切横移框架202通过横切横移滑轨264滑动连接,横切料伺服电机261通过驱动横切升降组件带动横切组件横移。
89.横切升降组件包括第一横切升降板255、第二横切升降板251以及横切升降气缸254,第一横切升降板255与横切料传送带263固设连接,横切升降气缸254与主控系统连接,主控系统控制横切升降气缸254,横切升降气缸254固设在第一横切升降板255,第二横切升降板251固设在横切升降气缸254的输出端,且第二横切升降板251与第一横切升降板255之间设置有导向杆,第二横切升降板251相对导向杆滑动连接,横切升降气缸254控制第二横切升降板251做升降运动,横切组件固设在第二横切升降板251,横切组件包括横切下挡板254、横切锯电机252以及横切割片253,横切锯电机252与主控系统连接,主控系统控制横切锯电机252,横切锯电机252与第二横切升降板251固设连接,横切锯电机252的输出轴与横切割片253固设连接,横切锯电机252驱动横切割片253旋转实现对板材切割,横切下挡板254位于横切割片253下方,横切下挡板254上固设有横切槽(图未标识),横切槽宽度大于横切割片253的厚度,横切组件处于切割状态时,横切割片253位于横切槽内,保证切割的安全性。
90.横切压紧组件包括横切前压紧构件和横切后压紧构件,横切前压紧构件和横切后压紧构件位于横切组件的两侧,用于在板材切割的前后方向压紧板材,横切前压紧构件设置有若干且位于横切组件与横切前传送机构之间,若干横切前压紧构件通过横切前压紧固定杆241固定在横切框架201,若干横切前压紧构件横向排列分布,横切前压紧构件包括横
切前压紧气缸242和横切前压紧板243,横切前压紧气缸242与主控系统连接,主控系统控制横切前压紧气缸242,横切前压紧板243固设在横切前压紧气缸242的输出端,横切前压紧气缸242控制横切前压紧板243的升降实现对板材的放松和压紧,横切后压紧构件设置有若干且位于横切组件与运输装置4之间,若干横切后压紧构件通过横切后压紧固定杆244固定在横切横移框架202,若干横切后压紧构件横向排列分布,横切后压紧构件包括横切后压紧气缸245和横切后压紧板246,横切后压紧气缸245与主控系统连接,主控系统控制横切后压紧气缸245,横切后压紧板246固设在横切后压紧气缸245的输出端,横切后压紧气缸245控制横切后压紧板246的升降实现对板材的放松和压紧,横切后压紧气缸245和横切前压紧气缸242与主控系统连接,主控系统控制横切后压紧气缸245和横切前压紧气缸242。
91.本实施例中横切装置2的实施过程如下,上料装置1上料完成后,横切前定位靠山气缸241启动将横切前定位靠山242顶出,横切前传送电机215启动,将板材输送至横切前定位靠山242位置,定位靠山料到位传感器检测感应到料后,横切前传送电机215停止,根据设定的板材加工尺寸,横切前推料组件的后推料构件231启动,将板材推至横切的切割位置,横切压紧组件启动将板材切料的前后区域进行固定,防止切料时发生偏移,影响加工精度,压料完成后横切升降气缸254启动控制横切组件下降,横切锯电机252、横切料伺服电机261启动开始水平切料流程,切料完成后,横切升降气缸254控制横切组件上升,横切锯电机252停止,横切料伺服电机261控制并横切组件返回至初始位置,切料完成后,横切压紧组件退出,主控系统控制前推料构件232或后推料构件231将剩余板材向横切组件推送,一方面将余料推送至横切组件继续进行横切操作,另一方面通过余料将切割后的板材推送至运输装置4,运输装置4运输至纵切装置5进行纵切操作。
92.全自动板材切割装置还包括废料装置3,废料装置3位于横切装置2和运输装置4之间,废料装置3将横切装置2切割产生的废料输出。
93.本发明还提供了一种用于全自动板材切割装置的运输装置,所述运输装置4包括运输框架41、防掉料机构45、料定位靠山机构43和横切后传送机构42,横切后传送机构42安装在运输框架41,横切后传送机构42结构与横切前输送组件结构类似,在尺寸方面存在差异,横切后传送机构42包括横切后传送电机422,横切后传送电机422作为横切后传送机构42的传送动力,横切后传送机构42还包括横切后传送张紧机构,用于调节横切后传送机构42中传送带的张紧程度,横切后传送机构42与横切前输送组件的输出端对接。
94.本实施例中,运输框架41下方设置有固定平台40,料定位靠山机构43安装在固定平台40上,具体来说,料定位靠山机构43包括料定位靠山机架432,料定位靠山机架432滑动设置在固定平台40,固定平台40固设有料定位靠山伺服电机431,料定位靠山伺服电机431驱动料定位靠山机架432沿横切后传送机构42的传送方向做滑动运动,料定位靠山机架432的横梁上固设有若干横向排列的料定位靠山气缸433,料定位靠山气缸433与主控系统连接,主控系统控制料定位靠山气缸433,若干料定位靠山气缸433的输出端与一组料定位靠山压板434固设连接,料定位靠山机构43还设置有料定位靠山传感器435,料定位靠山传感器435用于检测是否有料,从而确认板材是否传输到位。
95.防掉料机构45设置有若干,且若干防掉料机构45横向排列固设在固定平台40上,且若干防掉料机构45位于横切后传送机构42的输入端,防掉料机构45包括防掉料气缸451,防掉料气缸451与主控系统连接,主控系统控制防掉料气缸451,防掉料气缸451固设在固定
平台40,防掉料气缸451的输出端固设有防掉料挡板452,防掉料挡板452向横切后传送机构42外部延伸,并与横切前输送组件的输出端相对,防掉料挡板452与横切后传送机构42的传送带处于同一平面或近似同一平面,防掉料机构45处于初始状态时,防掉料挡板452靠近防掉料气缸451,防掉料机构45处于防掉料状态时,防掉料挡板452远离防掉料气缸451并向横切后传送机构42外部延伸,通过防掉料挡板452减少横切前输送组件输出端与横切后传送机构42输入端的距离,防止板材掉落。
96.本实施例中运输装置4的实施过程如下,运输装置4与横切装置2协同配合,实现横切以及运输操作,横切装置2中横切前传送电机215启动,将板材输送至横切前定位靠山242位置进行定位后,防掉料机构45启动,根据设定的板材加工尺寸,料定位靠山伺服电机431驱动料定位靠山机架432移动至对应的位置,料定位靠山气缸433启动控制料定位靠山压板434下降,横切前推料组件的后推料构件231启动,将板材推至与料定位靠山压板434相抵的定位位置,横切前传送电机215以及横切后传送电机422启动,保证板材尽量与料定位靠山压板434对齐,板材对齐后进行横切操作,横切后,主控系统控制前推料构件232或后推料构件231将余料推送至运输装置4,横切后传送电机422启动将横切后的板材运输至纵切装置5进行纵切操作,根据下一个设定的板材加工尺寸,料定位靠山伺服电机431驱动料定位靠山机架432移动至对应的位置,根据加工尺寸与板材横切后的余料尺寸计算判断是否需要上料,若需要上料,上料装置1启动上料流程;若不需要上料,根据余料尺寸与设备参数计算判断主控系统控制前推料构件232或后推料构件231,执行推料动作,并完成横切料流程。若余料小于下一个设定的板材加工尺寸但不小于设定值,本实施例中设定值设置为5cm,执行上料装置1的上料流程,将余料尺寸与下一次上料的板材尺寸合并设为整体尺寸,与下一次设定的板材加工尺寸进行判断,主控系统控制前推料构件232或后推料构件231,执行推料动作,并完成横切料流程,若余料小于设定值,本实施例中设定值设置为5cm,防掉料机构45回复至初始位置,废料装置3启动,前推料构件232将余料推送至排废料区,废料掉落至废料装置3,将废料排出,本实施例中,将不小于设定值的余料与下一次上料的板材作为整体,以用于后续的推料切料操作,将小于设定值的余料推送至排废料区,在保证质量的同时提高余料的利用率,降低了成本和耗损。
97.本发明还提供了一种用于全自动板材切割装置的纵切装置,所述纵切装置5包括纵切前传送机构以及纵切机构,纵切前传送机构与运输装置4对接,运输装置4将经横切的板材传输至纵切前传送机构,纵切前传送机构包括纵切前框架501、纵切前输送组件、纵切前侧推组件以及纵切前推料组件,纵切前输送组件将已横切的板材进行初步移动,纵切前侧推组件将板材推动到纵切推料区域,纵切前推料组件将板材推送至纵切机构进行纵切操作。
98.纵切前输送组件包括纵切前传输构件和纵切前升降构件,纵切前传输构件与横切后传送机构42结构和传动原理相似,在此不作赘述,纵切前传输构件包括纵切前传送伺服电机531和纵切前传送带,纵切前传送伺服电机531与主控系统连接,主控系统控制纵切前传送伺服电机531,纵切前传送伺服电机531通过控制纵切前传送带传动带动板材运动,纵切前升降构件包括第一纵切升降板533、第二纵切升降板535以及纵切前升降气缸534,纵切前升降气缸534与主控系统连接,主控系统控制纵切前升降气缸534,纵切前传输构件固设在第一纵切升降板533,第一纵切升降板533固设在纵切前升降气缸534的输出端,纵切前升
降气缸534固设在第二纵切升降板535,第二纵切升降板535固设在纵切前框架501,第二纵切升降板535与第一纵切升降板533之间设置有导向杆,第二纵切升降板535相对导向杆滑动连接,纵切前升降气缸534控制第一纵切升降板533做升降运动,从而控制纵切前传输构件做升降运动。
99.纵切前框架501的上端面设置有若干纵切平台(图未标识),若干纵切平台沿垂直于纵切前传输构件传送方向分布,相邻纵切平台间固设有升降腔(图未标识),纵切前传输构件的纵切前传送带位于升降腔内,纵切前输送组件处于初始状态时,纵切前传输构件位于纵切平台的下方,纵切前输送组件进行传送时,纵切前传输构件启动控制纵切前升降构件顶升,使纵切前传送带高于纵切平台,此时运输装置4将经横切的板材传输至纵切前传输构件的纵切前传送带上,传送完成后,纵切前传输构件启动控制纵切前升降构件下降,将板材落在纵切平台上进行下一步工序。
100.纵切前输送组件还包括纵切平台有料传感器(图未标识),纵切平台有料传感器与主控系统连接,纵切平台有料传感器用于检测纵切前传送伺服电机531是否将板材输送到位,纵切平台有料传感器感应到料后,纵切前传送伺服电机531停止并返回至原点位置。
101.纵切前侧推组件设置有若干,且固设在纵切前框架501,若干纵切前侧推组件通过纵切前推料动力组件(图未显示)驱动,控制若干纵切前侧推组件同步运动,若干纵切前侧推组件分别位于升降腔内,纵切前侧推组件与前推料构件232或后推料构件231结构相似,纵切前侧推组件包括纵切前侧推气缸542和纵切前侧推板541,纵切前侧推板541固设在纵切前侧推气缸542的输出端,纵切前侧推气缸542将纵切前侧推板541顶升,纵切前推料动力组件驱动纵切前侧推组件并通过纵切前侧推板54推动板材,保证板材侧边靠齐,便于纵切前推料组件的推料操作。
102.纵切前推料组件包括纵切前推料框架520、纵切前推料横移构件521、纵切前推料升降构件522、纵切前推料板523以及纵切前推料限制板524,纵切前推料横移构件521安装在纵切前推料框架520,并相对纵切前推料框架520做横移运动,纵切前推料横移构件521以及纵切前推料升降构件522的结构和原理与上料横移机构12和上料升降机构13的结构和原理相同,在此不作赘述,纵切前推料板523固设在纵切前推料升降构件522的下端,纵切前推料升降构件522带动纵切前推料板523做升降运动,纵切前推料横移构件521通过带动纵切前推料升降构件522控制纵切前推料板523做横移运动实现对板材的推送,纵切前推料板523将板材沿垂直于纵切前传输构件传送方向进行推送。
103.本实施例中,纵切前推料限制板524设置为l型结构,包括沿纵切前传输构件传送方向分布的第一限制板和垂直于纵切前传输构件传送方向分布的第二限制板,第一限制板限制纵切前推料横移构件521的移动防止出现超出行程的问题,第二限制板用于限制板材,纵切前侧推组件将板材沿纵切前传输构件传送方向推动至第二限制板,实现板材侧边靠齐。
104.纵切机构包括纵切框架502、纵切压紧组件552、纵切横移组件551、纵切升降组件554以及纵切组件553,纵切组件553安装在纵切升降组件554,纵切压紧组件552压紧板材,纵切横移组件551以及纵切升降组件554控制纵切组件553移动便于切割,纵切框架502、纵切压紧组件552、纵切横移组件551、纵切升降组件554以及纵切组件553分别与横切框架502、横切压紧组件、横切横移组件、横切前升降构件以及横切组件结构和原理相同,纵切组
件553通过纵切料伺服电机驱动,纵切割片通过纵切锯电机驱动,在此不作赘述,纵切机构还包括侧对齐组件555,侧对齐组件555包括若干侧对齐构件,本实施例中,若干侧对齐构件同步运动将处于切割位的板材在垂直于纵切前推料组件的推料方向进行移动保证板材侧边对齐,防止板材在纵切前推料组件推料过程中发生偏移,保证切割过程中板材的稳定性。
105.本实施例中纵切装置5的实施过程如下,纵切前传输构件启动控制纵切前升降构件顶升,纵切前传送伺服电机531启动,运输装置4将经横切的板材传输至纵切前传输构件,并经纵切前传输构件将板材传输至纵切放料区,纵切平台有料传感器感应到料后,纵切前传送伺服电机531停止,纵切前传输构件启动控制纵切前升降构件下降,纵切前侧推组件启动,将板材侧边靠齐,纵切前推料组件启动,将板材推送至纵切的切割位,侧对齐构件再次将板材侧边对齐,纵切压紧组件552将板材压紧,纵切机构在切割位先对板材进行齐头切割,保证板材纵向对齐,且齐头后根据设定的纵切加工尺寸纵切机构对在切割位对板材进行纵切操作。
106.本实施例中成品板材运输装置6与纵切装置5对接,将成品板材运输至组装区域。
107.本实施例中,成品板材运输装置6可与现有的全自动木门生产线对接,实现更大程度上的自动化,减少人工成本,且大大提高了生产效率。
108.本实施例中,板材可采用方木或/和复合填充板或/和复合门皮板,可实现不同板材切割设备的协同配合,实现更大程度上的自动化,减少人工成本,且大大提高了生产效率。
109.如图11-14所示,本实施例还提供了一种全自动板材切割装置的使用方法,该方法利用全自动板材切割装置对板材进行切割,全自动板材切割装置包括上述的主控系统、上料装置1、横切装置2、废料装置3、运输装置4、纵切装置5以及成品板材运输装置6,主控系统分别与上料装置1、横切装置2、运输装置4、纵切装置5以及成品板材运输装置6连接并控制各装置的运行,具体包括以下步骤:
110.步骤1:全自动板材切割装置预处理;
111.步骤1.1:pc下发加工数据至主控系统;
112.步骤1.1:依次启动各装置,确认各装置运行正常;
113.步骤2:上料装置1上料;
114.步骤3:横切装置2横切板材;
115.步骤4:运输装置4将横切后板材输送至纵切装置5;
116.步骤5:纵切装置5纵切板材;
117.步骤6:成品板材运输装置6运输成品板材;
118.上述上料装置1包括上料框架11、上料横移机构12、上料升降机构13、上料夹紧机构14以及报警装置15,横切装置2包括横切前传送机构以及横切机构,横切前传送机构包括横切框架200、横切前输送组件、横切前推料组件和横切前定位靠山组件,横切机构包括横切框架201、横切压紧组件、横切横移组件、横切升降组件以及横切组件,运输装置4包括运输框架41、防掉料机构45、料定位靠山机构43和横切后传送机构42,纵切装置5包括纵切前传送机构以及纵切机构,纵切前传送机构包括纵切前框架501、纵切前输送组件、纵切前侧推组件以及纵切前推料组件,纵切机构包括纵切框架502、纵切压紧组件552、纵切横移组件551、纵切升降组件554、纵切组件553以及侧对齐组件555。
119.步骤2中上料装置1上料步骤如下;
120.步骤2.1:确认取料区是否有料,若是,执行步骤2.2,若否,在取料区备料,备料后执行步骤2.1;
121.步骤2.2:确认上料装置1是否掉料,若否,执行步骤2.3,若是,上料装置1的上料横移机构12、上料升降机构13返回至初始位置,上料装置1的报警装置15报警,人工处理后执行步骤2.1;
122.步骤2.3:上料装置1将板材移动至横切装置2的待放料区,等待接收主控系统允许上料指令;
123.步骤2.4:上料装置1接收主控系统允许上料指令,上料装置1将板材将板材下降至放料位置,将板材放置在横切装置2,完成板材的上料工序。
124.步骤3中横切装置2横切板材的步骤如下:
125.步骤3.1:横切前定位靠山组件将板材定位;
126.横切前定位靠山组件的横切前定位靠山气缸241启动将固设在其输出端的横切前定位靠山242顶出,横切前输送组件的横切前传送电机215启动输送板材,横切前定位靠山组件的定位靠山料到位传感器检测感应到料后,横切前传送电机215停止,将板材进行定位;
127.步骤3.2:料定位靠山机构43根据板材加工尺寸定位板材;
128.本实施例中,设定料定位靠山机构43位于初始位置时,料定位靠山机构43的料定位靠山气缸433原点与横切组件的横切割片253之间的距离为hor,目标横切加工尺寸设定为t
hn
,料定位靠山伺服电机431控制料定位靠山机架432,相当于料定位靠山压板434的实际行走距离为m
hn
,n指横切加工次数,n≥1,t
h1
指第一次加工尺寸、t
h2
指第二次加工尺寸...t
hn
指第n次加工尺寸,各加工尺寸的数值根据需要设定,m
h1
指第一次加工时料定位靠山伺服电机431控制料定位靠山机架432的实际行走距离、m
h2
指第二次加工时料定位靠山伺服电机431控制料定位靠山机架432的实际行走距离...m
hn
指第n次加工时料定位靠山伺服电机431控制料定位靠山机架432的实际行走距离,得到公式:
129.m
hn
=ho
r-t
hn
;
130.料定位靠山伺服电机431控制料定位靠山压板434移动m
hn
,料定位靠山气缸433控制料定位靠山压板434下降;
131.步骤3.3:板材推料处理;
132.步骤3.3.1:基础数据设定;
133.设定板材的初始宽度为w,横切前推料组件的前推料构件232的前推料气缸原点与横切割片253之间的距离为sf,前推料构件232的长度补偿为bf,横切前推料组件的后推料构件231的后推料气缸233原点与横切割片253之间的距离为sr,横切前定位靠山组件与横切割片253之间的距离为sz,横切前定位靠山组件的长度补偿为bz,横切割片253的补偿为db,当前板材后端与横切割片253之间的距离设为sa,板材余料尺寸设为y
h0
;
134.初始上料阶段:sa=w+db+sz+bz、y
h0
=w;
135.步骤3.3.2:运输装置4的防掉料机构45启动;
136.步骤3.3.3:主控系统根据基础数据选择后推料构件231或前推料构件232推料;
137.当sf+bf《sa《sr,主控系统控制后推料构件231推料,执行步骤3.3.3.1;
138.当sa《sf,主控系统控制前推料构件232推料,执行步骤3.3.3.2;
139.步骤3.3.3.1:后推料构件231推料;
140.主控系统控制后推料构件231进行推料动作,将板材推动至料定位靠山机构43进行定位,料定位靠山机构43的料定位靠山传感器435感应到料到位时,停止推料,后推料构件231返回至原点;
141.步骤3.3.3.2:前推料构件232推料;
142.主控系统控制前推料构件232进行推料动作,将板材推动至料定位靠山机构43进行定位,料定位靠山机构43的料定位靠山传感器435感应到料到位时,停止推料,前推料构件232返回至原点;
143.步骤3.3.4:主控系统控制启动横切前输送组件和横切后传送机构42,使板材与料定位靠山机构43对齐;
144.步骤3.4:横切压紧组件的横切前压紧构件和横切后压紧构件启动将板材切料的前后区域进行固定;
145.步骤3.5:横切横移组件、横切升降组件以及横切组件启动,横切割片253切割板材;
146.步骤3.6:板材余料尺寸计算;
147.经切割的板材余料尺寸设为y
hm
,m指切割次数,m≥1,y
h1
指经一次切割的板材余料尺寸、y
h2
指经二次切割的板材余料尺寸...y
hm
指经m次切割的板材余料尺寸,n与m数值一致,主控系统根据t
h1
进行第一次加工,得到一次切割的板材余料尺寸y
h1
,根据t
hn
进行第n次加工,得到m次切割的板材余料尺寸y
hm
;
148.y
hm
=y
h0-(t
h1
+t
h2
+...+t
hn
)-(db×
n);
149.步骤3.7:判定下一次加工尺寸t
h(n+1)
是否大于y
hm
,若否,执行步骤3.8,若是,执行步骤3.9;
150.步骤3.8:板材余料横切加工;
151.步骤3.8.1:主控系统根据板材余料以及基础数据选择后推料构件231或前推料构件232推料;
152.当sf+bf《y
hm
《sr,主控系统控制后推料构件231推料,执行步骤3.8.1.1;
153.当y
hm
《sf,主控系统控制前推料构件232推料,执行步骤3.8.1.2;
154.步骤3.8.1.1:后推料构件231推料;
155.主控系统控制后推料构件231进行推料动作,将切割后的板材推出横切的切割位置,并送至横切后传送机构42,横切后传送机构42将切割后的板材输送至纵切装置5,后推料构件231将板材余料推动至料定位靠山机构43进行定位,料定位靠山机构43的料定位靠山传感器435感应到料到位时,停止推料,后推料构件231返回至原点;
156.后推料构件231的送料距离设定为m
1a
,a指后推料构件231推料次数,a≥1,m
11
指后推料构件231的第一次推料的送料距离、m
12
指后推料构件231的第二次推料的送料距离...m
1a
指后推料构件231的第a次推料的送料距离,a《n以及a《m,a指n次加工中的第a次加工以及第m次切割中的第a次切割,后推料构件231的送料补偿距离设定为b1;
157.m
1a
=s
r-y
hm
+b1;
158.步骤3.8.1.2:前推料构件232推料;
159.主控系统控制前推料构件232进行推料动作,将切割后的板材推出横切的切割位置,并送至横切后传送机构42,横切后传送机构42将切割后的板材输送至纵切装置5,前推料构件232将板材推动至料定位靠山机构43进行定位,料定位靠山机构43的料定位靠山传感器435感应到料到位时,停止推料,前推料构件232返回至原点;
160.前推料构件232的送料距离设定为m
2b
,b指前推料构件232推料次数,b≥1,b《n以及b《m,b不包括废料的推料次数,本实施例中,后推料构件231根据尺寸推料a次后,根据余料尺寸前推料构件232推料b次,a+b=n=m,m
21
指前推料构件232的第一次推料即n次加工中的第a+1次加工的送料距离、m
22
指前推料构件232的第二次即n次加工中的第a+2次加工的送料距离...m
2b
指前推料构件232的第b次即n次加工中的第n次加工推料的送料距离,前推料构件232的送料补偿距离设定为b2;
161.m
2b
=s
f-y
h(a+1)
+b2;
162.步骤3.8.2:主控系统控制启动横切前输送组件和横切后传送机构42,将板材余料与料定位靠山机构43对齐;
163.步骤3.8.3:横切压紧组件的横切前压紧构件和横切后压紧构件启动将板材余料的切料前后区域进行固定;
164.步骤3.8.4:横切横移组件、横切升降组件以及横切组件启动,横切割片253切割板材余料;
165.步骤3.8.5:执行步骤3.6;
166.步骤3.9:主控系统判定y
hm
尺寸,若y
hm
>5cm,执行步骤3.9.1;若y
hm
《5cm,执行步骤3.9.2;
167.步骤3.9.1:主控系统控制上料装置1上料,余料尺寸y'
hm
=y
hm
+w',w'指下一次上料的板材初始宽度,执行步骤2;
168.步骤3.9.2:防掉料机构45复位,废料装置3启动,前推料构件232将余料推送至排废料区,废料掉落至废料装置3,将废料排出,主控系统控制上料装置1上料,执行步骤2。步骤5中纵切装置5纵切板材的步骤如下:
169.步骤5.1:纵切前输送组件的纵切前传输构件将板材传输至纵切放料区,纵切平台有料传感器感应到料后,纵切前传输构件停止传输,纵切前输送组件的纵切前升降构件控制纵切前传输构件下降将板材放置在纵切前框架501的纵切平台上;
170.步骤5.2:纵切前侧推组件推动板材使板材侧边靠齐;
171.本实施例中,纵切前侧推组件位于初始位置时,纵切前侧推组件的纵切前侧推气缸542原点与纵切前推料组件的纵切前推料限制板524的第二限制板之间的距离设定为zor,经横切加工的板材宽度尺寸设定为t
hn
,纵切前侧推气缸542的实际行走距离设定为m
zn
,n指横切加工次数,横切装置横切加工一次,运输装置4将切割后板材运输一次,纵切前侧推组件侧推板材一次,得到公式:
172.m
zn
=zo
r-t
hn
;
173.步骤5.3:纵切前推料组件启动将板材推送至纵切的切割位;
174.横切后板材的初始长度(纵切方向)设定为l,齐头量设定为q
t
,切割余量设定为y
t
;纵切割片的补偿为db',目标纵切加工尺寸设定为t
zx
,t
zx
》y
t
≥0,x指加工目标纵切尺寸的次数,x≥1,t
z1
指第一次加工尺寸、t
z2
指第二次加工尺寸...t
zx
指第x次加工尺寸,一般来说,
175.l=q
t
+(t
z1
+t
z2
+...+t
zn
)+d
b'
×
n+y
t
;
176.纵切前推料组件的纵切前推料板523初始位置与纵切组件553的纵切割片之间的距离为s
f'
,纵切前推料板523的补偿设定为bf',纵切割片的补偿为db',纵切前推料组件推料的前进距离设定为m
zy
,y为一块板材纵切前推料组件的推料次数,得到m
zy
计算公式:
[0177][0178]
纵切前推料组件的推料次数y=0时,纵切前推料组件将板材输送进行切齐头操作,纵切前推料组件的推料次数y=x,纵切前推料组件将板材输送进行目标尺寸的纵切加工,纵切前推料组件的推料次数y=x+1时,纵切前推料组件将完成纵切操作的剩余的切割余料输送至成品板材运输装置6;
[0179]
步骤5.4:纵切机构对板材进行纵切操作;
[0180]
步骤5.4.1:侧对齐组件555启动将板材侧边靠齐;
[0181]
侧对齐组件555的实际行走距离与m
zn
一致,在此不作赘述;
[0182]
步骤5.4.2:纵切压紧组件552启动将板材切料的区域进行固定;
[0183]
步骤5.4.3:纵切横移组件551、纵切升降组件554以及纵切组件553启动,纵切组件553对板材进行切齐头操作,完成切齐头操作;切齐头操作后板材后端与纵切割片之间的距离设为s
a'
,s
a'
=s
f'-q
t-d
b'
;
[0184]
步骤5.4.4:纵切横移组件551、纵切升降组件554以及纵切组件553复位,纵切前推料组件根据t
zx
移动m
zy
将板材推送至纵切的切割位;
[0185]
步骤5.4.5:侧对齐组件555启动将板材侧边靠齐;
[0186]
步骤5.4.6:纵切横移组件551、纵切升降组件554以及纵切组件553启动,纵切组件553对板材进行纵切操作;
[0187]
步骤5.4.7:板材余料计算;
[0188]
板材进行目标尺寸的纵切加工后,板材余料尺寸设定为y
zx
,y
z1
指根据t
z1
纵切的板材余料尺寸、y
z2
指根据t
z2
纵切的板材余料尺寸...y
zx
指根据t
zx
纵切的板材余料尺寸,
[0189]yzx
=s
a'-(t
z1
+t
z2
+...+t
zx
)-(d
b'
×
x);
[0190]
步骤5.4.8:判定下一次加工尺寸t
z(x+1)
是否大于y
zx
,若否,执行步骤5.4.9,若是,执行步骤5.5;
[0191]
步骤5.4.9:板材余料纵切加工;
[0192]
步骤5.4.9.1:纵切前推料组件启动根据t
z(x+1)
将板材推送至纵切的切割位;
[0193]
步骤5.4.9.2:侧对齐组件555启动将板材侧边靠齐;
[0194]
步骤5.4.9.3:纵切压紧组件552启动将板材切料的区域进行固定;
[0195]
步骤5.4.9.4:纵切横移组件551、纵切升降组件554以及纵切组件553启动,纵切组件553对板材进行纵切操作;
[0196]
步骤5.4.9.5:纵切前推料组件将成品板材输送至成品板材运输装置6;
[0197]
步骤5.4.9.6:执行步骤5.4.8;
[0198]
步骤5.5:t
z(x+1)
大于y
zx
时,板材余料尺寸y
zx
等同于切割余量y
t
,纵切前推料组件将
切割余料推送至成品板材运输装置6;
[0199]
步骤5.6:主控系统控制运输装置4将横切后的板材输送至纵切前传送机构完成上料操作,执行步骤5.1。
[0200]
显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1