一种胶合板加工用的自清理式六轴加工装置的制作方法
1.本实用新型涉及胶合板加工设备,更具体地说,它涉及一种胶合板加工用的自清理式六轴加工装置。
背景技术:
2.胶合板在生产加工的过程中,当胶合板热压过后,一般需要对其周围进行切割,去除边缘未热压成型的部分。传统的切割方式大多是台式切割机,台式切割机需要人工操作切割,不仅劳动强度大,而且工作环境差。因此,为了提高工作效率,有的企业采用了六轴机器人来切割,将胶合板固定在固定座上,然后六轴机器人根据设定的程序来对胶合板周围切割,无需人工辅助切割,因此,此类六轴加工加工设备逐步应用于众多的胶合板生产企业中。
3.同时,在胶合板加工的过程中,通常会产生大量的木屑,对于这些木屑的清理,一般是在固定座一侧设置抽风机将木屑抽走。但是,由于抽风机及集风罩都是固定的,而六轴加工装置的切割刀具是不断移动的对不同的位置进行切削加工,容易导致远离集风罩的位置的木屑难以抽走的问题,木屑清理效果不理想。因此,亟需研发设计一种胶合板加工用的自清理式六轴加工装置。
技术实现要素:
4.本实用新型要解决的技术问题是针对现有技术的上述不足,其目的是提供一种胶合板加工用的自清理式六轴加工装置,能够对不同加工位置的木屑进行清理,有效提高清理效果。
5.本实用新型的技术方案是这样的:一种胶合板加工用的自清理式六轴加工装置,包括六轴机器人和抽风机、集风罩,所述的抽风机通过支撑板安装在六轴机器人的底座一侧,所述的集风罩安装在靠近切割刀具一端的六轴机器人的末端底部,所述抽风机的进风口通过波纹管与集风罩连通,所述六轴机器人的中部、末端设有用于固定波纹管的卡接组件,所述六轴机器人的顶部设有用于悬挂波纹管的悬挂组件;所述抽风机的出风管上通过绳子捆绑有布袋。
6.作为进一步地改进,所述的卡接组件包括u形卡座,所述u形卡座的两侧设有紧固螺栓,所述紧固螺栓贯穿u形卡座并螺纹连接在六轴机器人上,所述的波纹管卡接在u形卡座内。
7.进一步地,所述的悬挂组件包括固定板,拉杆和悬挂环,所述的固定板通过螺钉紧固在六轴机器人的顶部,所述的拉杆倾斜固定在固定板的一端,所述的悬挂环通过拉绳与拉杆的另一端连接,所述的波纹管活动插接在悬挂环内。
8.进一步地,所述的集风罩底部设有过滤网。
9.进一步地,所述过滤网的外边缘设有螺纹环,所述的集风罩底部设有螺纹管,所述的螺纹环螺纹连接在螺纹管内。
10.进一步地,所述的过滤网底部中心固定有磁铁块。
11.有益效果
12.本实用新型与现有技术相比,具有以下优点:
13.本实用新型的自清理式六轴加工装置,通过将集风罩集成在靠近切割刀具的六轴机器人末端,在切削加工的过程中,集风罩能够随着六轴机器人摆动而摆动,使得集风罩更加靠近切割工位,能够对不同加工位置的木屑进行清理,有效提高清理效果。
附图说明
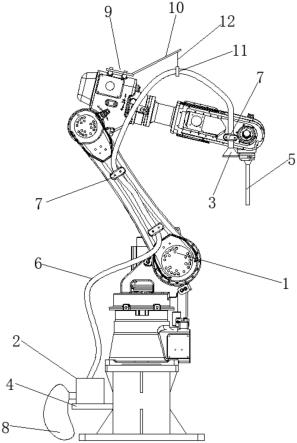
14.图1为本实用新型的结构示意图;
15.图2为本实用新型中卡接组件的结构放大示意图;
16.图3为本实用新型中集风罩的剖面结构放大示意图。
17.其中:1-六轴机器人、2-抽风机、3-集风罩、4-支撑板、5-切割刀具、6-波纹管、7-卡接组件、8-布袋、9-固定板、10-拉杆、11-悬挂环、12-拉绳、13-过滤网、14-螺纹环、15-螺纹管、16-磁铁块、71-u形卡座、72-紧固螺栓。
具体实施方式
18.下面结合附图中的具体实施例对本实用新型做进一步的说明。
19.参阅图1-3,本实用新型的一种胶合板加工用的自清理式六轴加工装置,包括六轴机器人1和抽风机2、集风罩3,其中,抽风机2通过支撑板4安装在六轴机器人1的底座一侧,集风罩3安装在靠近切割刀具5一端的六轴机器人1的末端底部,使得集风罩3靠近切割刀具5布置,抽风机2的进风口通过波纹管6与集风罩3连通,波纹管6为塑料波纹软管,在六轴机器人1的中部、末端设有用于固定波纹管6的卡接组件7,在六轴机器人1的顶部设有用于悬挂波纹管6的悬挂组件;在抽风机2的出风管上通过绳子捆绑有布袋8,方便将木屑回收。
20.本实用新型的自清理式六轴加工装置,通过将集风罩3集成在靠近切割刀具5的六轴机器人1末端,在切削加工的过程中,集风罩3能够随着六轴机器人1摆动而摆动,使得集风罩3更加靠近切割工位,在切割时,六轴机器人1带动切割刀具5对胶合板进行切割,切割过程中产生木屑经过集风罩3进入到波纹管6,最后通过抽风机2进入到布袋8中,实现对木屑的清理并收集,该六轴加工装置能够对不同加工位置的木屑进行清理,有效提高清理效果。
21.优选的,卡接组件7包括u形卡座71,该u形卡座71的两侧设有紧固螺栓72,其中,紧固螺栓72贯穿u形卡座71并螺纹连接在六轴机器人1上,波纹管6卡接在u形卡座71内,在安装过程中,波纹管6穿过u形卡座71后,再利用紧固螺栓72将u形卡座71紧固在六轴机器人1上,从而实现将波纹管6压紧在u形卡座71内。
22.优选的,悬挂组件包括固定板9,拉杆10和悬挂环11,其中,固定板9通过螺钉紧固在六轴机器人1的顶部,拉杆10倾斜固定在固定板9的一端,悬挂环11通过拉绳12与拉杆10的另一端连接,波纹管6活动插接在悬挂环11内,使得波纹管6摆动更加灵活,能够很好的适配六轴机器人1的摆动,防止干涉的问题。
23.优选的,在集风罩3底部设有过滤网13,可以将一些条状木屑滤出,防止进入到波纹管6内而造成堵塞的问题。
24.优选的,在过滤网13的外边缘设有螺纹环14,螺纹环14为外螺纹结构,固定在过滤网13的外边缘,在集风罩3底部设有螺纹管15,其中,螺纹环14螺纹连接在螺纹管15内,其过滤网13通过螺纹环14和螺纹管15与集风罩3连接,方便拆装维护。进一步地,过滤网13底部中心固定有磁铁块16,磁铁块16可以将木屑中的一些铁屑吸出来,以免收集到的木屑中含有铁屑而不便于后续再利用的问题,磁铁块16可以为环形结构,满足吸附要求的同时,减少其占用面积,保证集风罩3的进风量。
25.以上所述的仅是本实用新型的优选实施方式,应当指出对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些都不会影响本实用新型实施的效果和专利的实用性。
技术特征:
1.一种胶合板加工用的自清理式六轴加工装置,包括六轴机器人(1)和抽风机(2)、集风罩(3),其特征在于,所述的抽风机(2)通过支撑板(4)安装在六轴机器人(1)的底座一侧,所述的集风罩(3)安装在靠近切割刀具(5)一端的六轴机器人(1)的末端底部,所述抽风机(2)的进风口通过波纹管(6)与集风罩(3)连通,所述六轴机器人(1)的中部、末端设有用于固定波纹管(6)的卡接组件(7),所述六轴机器人(1)的顶部设有用于悬挂波纹管(6)的悬挂组件;所述抽风机(2)的出风管上通过绳子捆绑有布袋(8)。2.根据权利要求1所述的一种胶合板加工用的自清理式六轴加工装置,其特征在于,所述的卡接组件(7)包括u形卡座(71),所述u形卡座(71)的两侧设有紧固螺栓(72),所述紧固螺栓(72)贯穿u形卡座(71)并螺纹连接在六轴机器人(1)上,所述的波纹管(6)卡接在u形卡座(71)内。3.根据权利要求1所述的一种胶合板加工用的自清理式六轴加工装置,其特征在于,所述的悬挂组件包括固定板(9),拉杆(10)和悬挂环(11),所述的固定板(9)通过螺钉紧固在六轴机器人(1)的顶部,所述的拉杆(10)倾斜固定在固定板(9)的一端,所述的悬挂环(11)通过拉绳(12)与拉杆(10)的另一端连接,所述的波纹管(6)活动插接在悬挂环(11)内。4.根据权利要求1或2或3所述的一种胶合板加工用的自清理式六轴加工装置,其特征在于,所述的集风罩(3)底部设有过滤网(13)。5.根据权利要求4所述的一种胶合板加工用的自清理式六轴加工装置,其特征在于,所述过滤网(13)的外边缘设有螺纹环(14),所述的集风罩(3)底部设有螺纹管(15),所述的螺纹环(14)螺纹连接在螺纹管(15)内。6.根据权利要求4所述的一种胶合板加工用的自清理式六轴加工装置,其特征在于,所述的过滤网(13)底部中心固定有磁铁块(16)。
技术总结
本实用新型公开了一种胶合板加工用的自清理式六轴加工装置,属于胶合板加工设备领域,解决现有六轴加工装置对木屑清理效果差的问题。它包括六轴机器人和抽风机、集风罩,所述的抽风机通过支撑板安装在六轴机器人的底座一侧,所述的集风罩安装在靠近切割刀具一端的六轴机器人的末端底部,所述抽风机的进风口通过波纹管与集风罩连通,所述六轴机器人的中部、末端设有用于固定波纹管的卡接组件,所述六轴机器人的顶部设有用于悬挂波纹管的悬挂组件;所述抽风机的出风管上通过绳子捆绑有布袋。本实用新型的自清理式六轴加工装置,能够对不同加工位置的木屑进行清理,有效提高清理效果。效果。效果。
技术研发人员:庞志成 高伟 甘铭 郭家良 孙建平 吴航 刘志高 袁全平 庞洁 陈倩松 秦志永
受保护的技术使用者:容县润达家具有限公司
技术研发日:2022.06.30
技术公布日:2022/12/20
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1