一种基于灯光定位的加工中心控制方法与流程
本发明涉及加工中心领域技术,尤其是指一种基于灯光定位的加工中心控制方法,其主要运用于木材加工。
背景技术:
1、木工镂铣加工中心主要用于板料雕刻和成形表面的铣削,主要分为吊镂机和立铣机,立铣机又分为立式单轴木工镂铣机系列与立轴式木工镂铣机系列。
2、现有技术中的加工中心,其包括沿x轴向布置的机架、沿y轴向布置的加工机构、和多个沿y轴向布置的移动平台,移动平台可滑动式设置于机架上,移动平台上可滑动式设置有用于吸附固定待加工工件的吸盘装置,加工机构沿x轴向可移动式设置于移动平台的上方,该种结构下的加工中心,需先将板材固定在吸盘装置上,加工人员再根据板材的位置来模拟加工,其中,移动平台的放置位置和吸盘装置的放置位置均需要人工依据板材的尺寸进行测量后再放置,板材的定位步骤复杂,费时费力,降低了板材加工的效率。
3、因此,有必要设计一种新的技术方案来解决上述问题。
技术实现思路
1、有鉴于此,本发明针对现有技术存在之缺失,其主要目的是提供一种基于灯光定位的加工中心控制方法,其通过在机架的y轴向的一侧上设置有沿x轴向布置的第一发光灯组,在移动平台的x轴向的一侧上设置有沿y轴向布置的第二发光灯组,配合控制系统的控制,使得移动平台和吸盘装置可以依据第一发光灯组和第二发光灯组的指示位置进行精准定位,无需进行测量步骤,简化了定位工序,且加工人员可根据指示位置直接进行模拟加工,这样可以先在控制系统完成模拟加工的工序后直接根据指示位置放置待加工工件进行加工,实现直观的可视化模拟,可提高加工效率。
2、为实现上述目的,本发明采用如下之技术方案:
3、一种基于灯光定位的加工中心控制方法,包括沿x轴向布置的机架、沿y轴向布置的加工机构、控制系统和多个沿y轴向布置的移动平台,所述移动平台可滑动式设置于机架上,所述移动平台上可滑动式设置有用于吸附固定待加工工件的吸盘装置,所述加工机构沿x轴向可移动式设置于移动平台的上方,所述加工机构电连接于控制系统;
4、所述机架的y轴向的一侧上设置有沿x轴向布置的第一发光灯组,所述移动平台的x轴向的一侧上设置有沿y轴向布置的第二发光灯组,所述第一发光灯组和第二发光灯组均包括多个发光灯,所述控制系统包括灯组控制模块,所述第一发光灯组和第二发光灯组均电连接灯组控制模块;其控制方法如下:
5、步骤一,控制系统接收到待加工工件的x轴向尺寸和y轴向尺寸的信息;
6、步骤二,控制系统向灯组控制模块发送指令,所述灯组控制模块依据待加工工件的尺寸信息点亮相应数量的发光灯,以形成发光区域,所述第一发光灯组的发光灯指示出移动平台应该处于的x轴向的位置,所述第二发光灯组的发光灯指示出吸盘装置应该处于的y轴向的位置;
7、步骤三,依据第一发光灯组的位置信息将移动平台移动至相应位置,依据第二发光灯组的位置信息将吸盘装置移动至相应位置;
8、步骤四,将待加工工件固定至吸盘装置上;
9、步骤五,控制系统控制加工机构对待加工工件进行加工,控制系统控制第一发光灯组和第二发光灯组熄灭;
10、步骤六,加工机构工作完成后,完成对该待加工工件的加工。
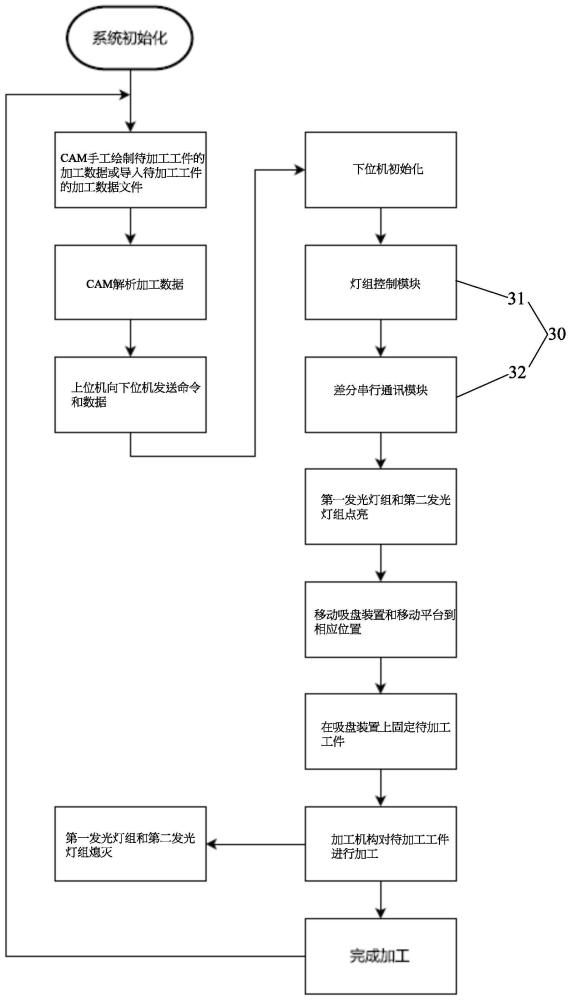
11、作为一种优选方案,所述控制系统包括上位机和下位机,所述下位机控制加工机构、移动平台、第一发光灯组和第二发光灯组,在步骤一中,首先,在上位机上通过cam手工绘制待加工工件的加工数据或导入待加工工件的加工数据文件,然后上位机通过cam解析加工数据,接着,上位机向下位机发送命令和数据,最后,下位机接收到待加工工件的x轴向尺寸和y轴向尺寸的信息。
12、作为一种优选方案,在步骤一前,上位机会执行系统初始化操作,在步骤二前,下位机会执行下位机初始化操作。
13、作为一种优选方案,所述灯组控制模块连接有差分串行通讯模块,所述第一发光灯组和第二发光灯组均连接于差分串行通讯模块,在步骤二中,所述灯组控制模块通过差分串行通讯模块控制发光灯点亮。
14、作为一种优选方案,所述机架的y轴向的两侧上均设置有x轴滑轨,所述吸盘装置可滑动式设置于x轴滑轨上,所述第一发光灯组设置于x轴滑轨的外侧。
15、作为一种优选方案,所述x轴滑轨的外侧设置有安装座,所述安装座开设有斜向设置的第一灯组安装槽,所述第一发光灯组通过第一安装条装设于第一灯组安装槽,所述第一发光灯组的灯光朝向x轴滑轨照射。
16、作为一种优选方案,所述移动平台的x轴向的一侧上设置有第二灯组安装槽,所述第二发光灯组通过第二安装条装设于第二灯组安装槽,所述第二发光灯组的灯光自第二灯组安装槽向外照射。
17、作为一种优选方案,所述吸盘装置为间隔设置的至少两个,所述移动平台上设置有定位气缸。
18、作为一种优选方案,所述机架的x轴向的两端分别设置有第一定位靠档和第二定位靠档,多个移动平台位于第一定位靠档和第二定位靠档之间。
19、作为一种优选方案,所述加工机构为镂铣加工机构。
20、本发明与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知:
21、其主要是,通过在机架的y轴向的一侧上设置有沿x轴向布置的第一发光灯组,在移动平台的x轴向的一侧上设置有沿y轴向布置的第二发光灯组,配合控制系统的控制,使得移动平台和吸盘装置可以依据第一发光灯组和第二发光灯组的指示位置进行精准定位,无需进行测量步骤,简化了定位工序,且加工人员可根据指示位置直接进行模拟加工,这样可以先在控制系统完成模拟加工的工序后直接根据指示位置放置待加工工件进行加工,实现直观的可视化模拟,可提高加工效率。
22、为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
技术特征:
1.一种基于灯光定位的加工中心控制方法,包括沿x轴向布置的机架、沿y轴向布置的加工机构、控制系统和多个沿y轴向布置的移动平台,所述移动平台可滑动式设置于机架上,所述移动平台上可滑动式设置有用于吸附固定待加工工件的吸盘装置,所述加工机构沿x轴向可移动式设置于移动平台的上方,所述加工机构电连接于控制系统;其特征在于:
2.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述控制系统包括上位机和下位机,所述下位机控制加工机构、移动平台、第一发光灯组和第二发光灯组,在步骤一中,首先,在上位机上通过cam手工绘制待加工工件的加工数据或导入待加工工件的加工数据文件,然后上位机通过cam解析加工数据,接着,上位机向下位机发送命令和数据,最后,下位机接收到待加工工件的x轴向尺寸和y轴向尺寸的信息。
3.根据权利要求2所述的一种基于灯光定位的加工中心控制方法,其特征在于:在步骤一前,上位机会执行系统初始化操作,在步骤二前,下位机会执行下位机初始化操作。
4.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述灯组控制模块连接有差分串行通讯模块,所述第一发光灯组和第二发光灯组均连接于差分串行通讯模块,在步骤二中,所述灯组控制模块通过差分串行通讯模块控制发光灯点亮。
5.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述机架的y轴向的两侧上均设置有x轴滑轨,所述吸盘装置可滑动式设置于x轴滑轨上,所述第一发光灯组设置于x轴滑轨的外侧。
6.根据权利要求5所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述x轴滑轨的外侧设置有安装座,所述安装座开设有斜向设置的第一灯组安装槽,所述第一发光灯组通过第一安装条装设于第一灯组安装槽,所述第一发光灯组的灯光朝向x轴滑轨照射。
7.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述移动平台的x轴向的一侧上设置有第二灯组安装槽,所述第二发光灯组通过第二安装条装设于第二灯组安装槽,所述第二发光灯组的灯光自第二灯组安装槽向外照射。
8.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述吸盘装置为间隔设置的至少两个,所述移动平台上设置有定位气缸。
9.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述机架的x轴向的两端分别设置有第一定位靠档和第二定位靠档,多个移动平台位于第一定位靠档和第二定位靠档之间。
10.根据权利要求1所述的一种基于灯光定位的加工中心控制方法,其特征在于:所述加工机构为镂铣加工机构。
技术总结
本发明公开一种基于灯光定位的加工中心控制方法,包括机架、加工机构、控制系统和移动平台,机架的Y轴向的一侧上设置有沿X轴向布置的第一发光灯组,移动平台的X轴向的一侧上设置有沿Y轴向布置的第二发光灯组,控制系统包括灯组控制模块;步骤一,控制系统接收到待加工工件的X轴向尺寸和Y轴向尺寸的信息;步骤二,控制系统向灯组控制模块发送指令,灯组控制模块依据待加工工件的尺寸信息点亮相应数量的发光灯,以形成发光区域;步骤三,依据第一发光灯组的位置信息将移动平台移动至相应位置,依据第二发光灯组的位置信息将吸盘装置移动至相应位置。简化了移动平台和吸盘装置的定位工序,实现直观的可视化模拟,可提高加工效率。
技术研发人员:陶宏健,胡伟科,曹梦莲,蔡俊达
受保护的技术使用者:南兴装备股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!