一种自动抓竹组合夹具的制作方法
本技术涉及竹子加工,特别指一种自动抓竹组合夹具。
背景技术:
1、竹子制品是一种常见、常用的物品,在生产竹制品的过程中,需要对竹子进行切割以满足生产的需要,即将一整根竹子切割为一段一段的。竹子在切割前,需要使用夹具夹持住竹子,再利用切割工具对其进行切割。
2、由于竹子表面存在水分、泥土和其它杂物,而传统上仅在端部使用一个夹具来夹持竹子,且未设置相关防滑措施,导致夹持竹子的一端在切割过程中容易打滑,在竹子切断瞬间会产生甩动,而竹子的打滑直接影响竹子的切割质量,竹子的甩动存在一定的安全隐患。
3、因此,如何提供一种自动抓竹组合夹具,实现提升竹子夹持的稳固性,进而提升竹子切割质量和安全性,成为一个亟待解决的技术问题。
技术实现思路
1、本实用新型要解决的技术问题,在于提供一种自动抓竹组合夹具,实现提升竹子夹持的稳固性,进而提升竹子切割质量和安全性。
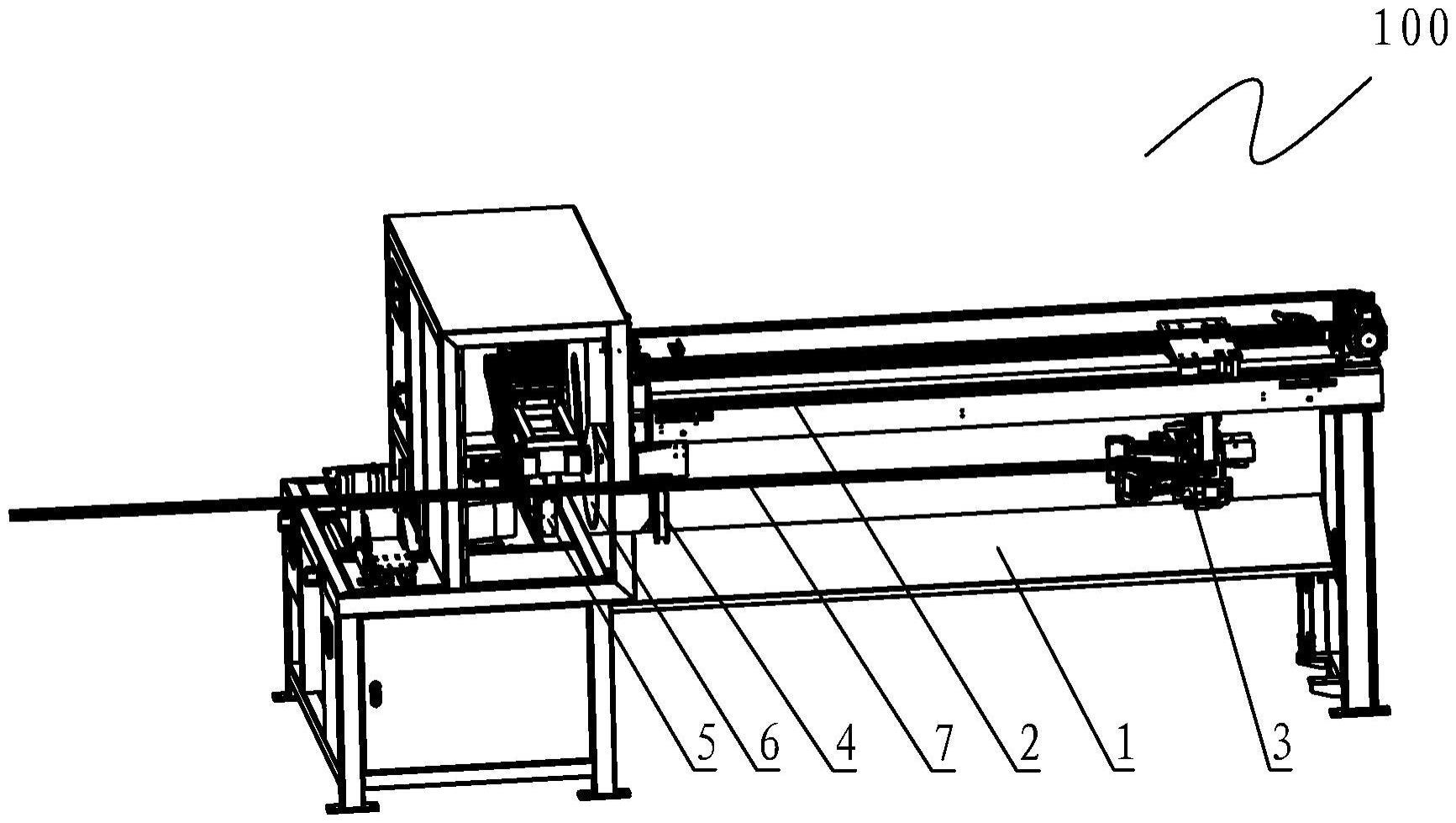
2、本实用新型是这样实现的:一种自动抓竹组合夹具,包括:
3、一个机架;
4、两条滑轨,水平设于所述机架上;
5、一个前夹爪,与所述滑轨滑动连接;
6、一个辅助夹爪,设于所述机架上,位于所述前夹爪的后方;
7、一个对中夹爪,设于所述机架上,位于所述辅助夹爪的后方;所述前夹爪、辅助夹爪以及对中夹爪处于同一轴线上。
8、进一步地,还包括:
9、一个锯片机构,设于所述机架上,位于所述辅助夹爪与对中夹爪之间。
10、进一步地,所述前夹爪包括:
11、一块滑动板,与所述滑轨滑动连接;
12、一个h型框架,垂直设于所述滑动板的底端;
13、两个前夹持机构,对称设于所述h型框架的左右两侧,夹持方向朝内。
14、进一步地,所述前夹持机构包括:
15、一个四连杆机构,一端与所述h型框架转动连接;
16、一个第一夹紧气缸,设于所述h型框架的侧面,动力输出端与所述四连杆机构的另一端连接;
17、一个第一夹持件,设于所述四连杆机构另一端的内侧,朝向另一个所述前夹持机构。
18、进一步地,所述第一夹持件为弧面聚氨酯夹块。
19、进一步地,所述第一夹持件为平面聚氨酯夹块。
20、进一步地,所述第一夹持件由平面聚氨酯夹块和第一金属齿夹块组成。
21、进一步地,所述辅助夹爪包括:
22、两个辅助夹持机构,对称设于所述机架上;
23、所述辅助夹持机构包括:
24、一个固定座,设于所述机架上;
25、一个第二夹紧气缸,设于所述固定座上;
26、一个夹臂,中部与所述第二夹紧气缸的动力输出端连接。
27、进一步地,所述夹臂的上部和下部设有一倾角。
28、进一步地,所述对中夹爪包括:
29、一条导轨,设于所述机架上;
30、两个链条张紧装置,设于所述机架上,位于所述导轨侧边;
31、一条同步链条,与两个所述链条张紧装置啮合;
32、一块左滑块,与所述导轨滑动连接,并与所述同步链条的上端连接;
33、一块右滑块,与所述导轨滑动连接,位于所述左滑块的右侧;
34、一个第三夹紧气缸,设于所述机架上,动力输出端与所述左滑块连接;
35、一个l型连接件,一端与所述右滑块连接,另一端与所述同步链条的下端连接;
36、两个第二夹持件,分别设于所述左滑块和右滑块的顶端。
37、本实用新型的优点在于:
38、通过在机架上设置处于同一轴线上的前夹爪、辅助夹爪以及对中夹爪,前夹爪通过第一夹持件对竹子的前端进行有效夹持,辅助夹爪对竹子的中部进行辅助夹持,对中夹爪通过导轨和同步链条联动两个第二夹持件相向运动,以对竹子的后端进行对中,即对竹子的前、中、后均进行有效夹持,避免竹子切断瞬间产生的甩动,最终极大的提升了竹子夹持的稳固性,进而极大的提升了竹子切割质量和安全性。
技术特征:
1.一种自动抓竹组合夹具,其特征在于:包括:
2.如权利要求1所述的一种自动抓竹组合夹具,其特征在于:还包括:
3.如权利要求1所述的一种自动抓竹组合夹具,其特征在于:所述前夹爪包括:
4.如权利要求3所述的一种自动抓竹组合夹具,其特征在于:所述前夹持机构包括:
5.如权利要求4所述的一种自动抓竹组合夹具,其特征在于:所述第一夹持件为弧面聚氨酯夹块。
6.如权利要求4所述的一种自动抓竹组合夹具,其特征在于:所述第一夹持件为平面聚氨酯夹块。
7.如权利要求4所述的一种自动抓竹组合夹具,其特征在于:所述第一夹持件由平面聚氨酯夹块和第一金属齿夹块组成。
8.如权利要求1所述的一种自动抓竹组合夹具,其特征在于:所述辅助夹爪包括:
9.如权利要求8所述的一种自动抓竹组合夹具,其特征在于:所述夹臂的上部和下部设有一倾角。
10.如权利要求1所述的一种自动抓竹组合夹具,其特征在于:所述对中夹爪包括:
技术总结
本技术提供了竹子加工技术领域的一种自动抓竹组合夹具,包括:一个机架;两条滑轨,水平设于所述机架上;一个前夹爪,与所述滑轨滑动连接;一个辅助夹爪,设于所述机架上,位于所述前夹爪的后方;一个对中夹爪,设于所述机架上,位于所述辅助夹爪的后方;所述前夹爪、辅助夹爪以及对中夹爪处于同一轴线上。本技术的优点在于:极大的提升了竹子夹持的稳固性,进而极大的提升了竹子切割质量和安全性。
技术研发人员:范伟清,童同,高钦泉,刘文哲
受保护的技术使用者:福建帝视科技集团有限公司
技术研发日:20230413
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!