一种用于大尺寸三维编织预制体致密化的致密装置
本发明涉及复合材料三维编织,具体是涉及一种用于大尺寸三维编织预制体致密化的致密装置。
背景技术:
1、复合材料三维编织是一种新型的先进复合材料成形工艺,三维编织复合材料构件具有强度高、密度低、模量高、耐高温、结构无层等优点。,因此在航空航天、武器装备等诸多领域三维编织均得到了高度重视和应用。
2、然而,三维编织技术更多地只用于加工尺寸小,截面形状变化小的预制体,对于复杂形的预型件需通过在编织过程中改变纤维排布或数量,使得加工工序复杂化,有着成形范围小,自动化程度低等缺陷。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种高效、快速实现大型三维编织装备成形的大范围预制体致密化的致密装置。
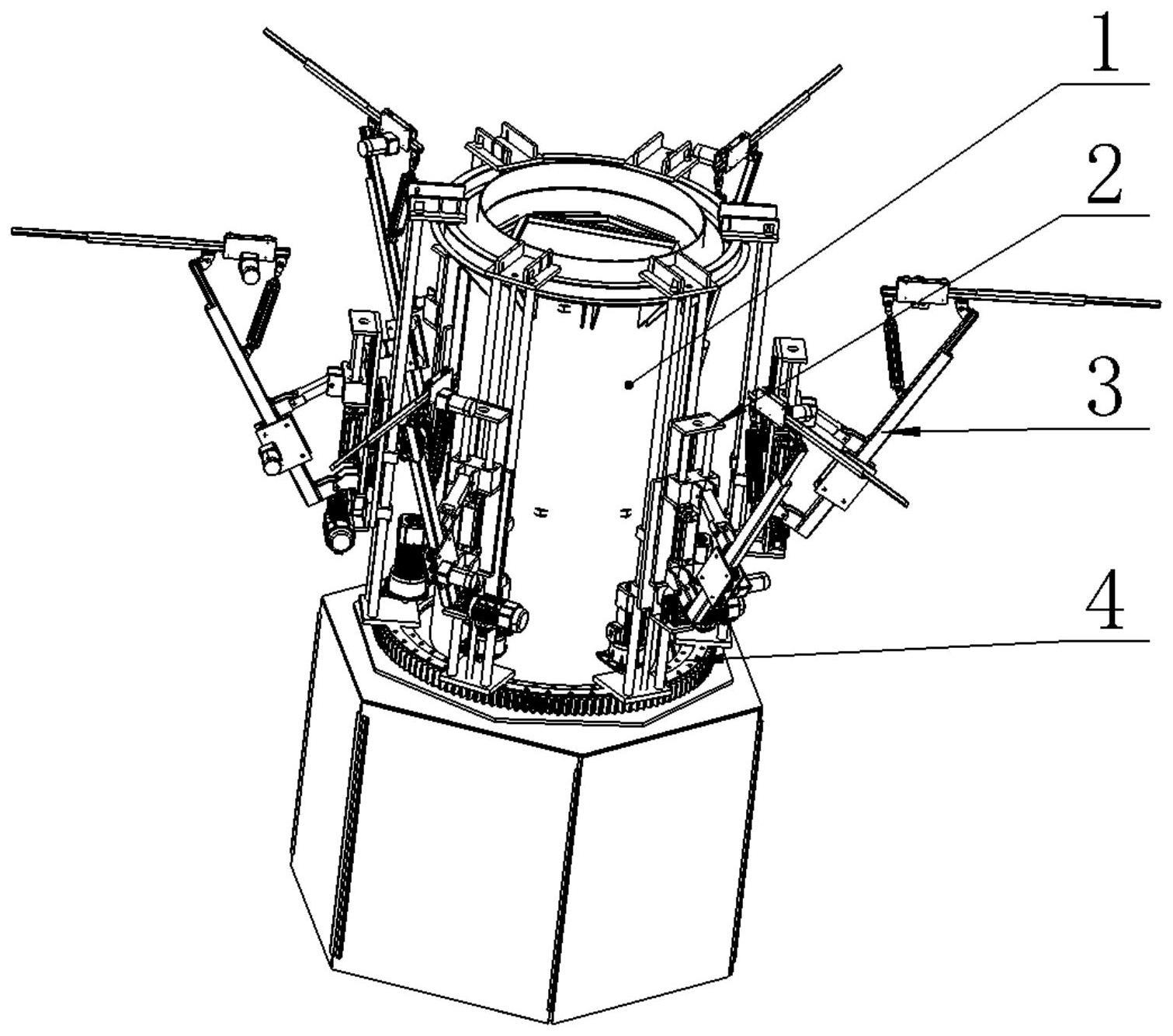
2、技术方案:为解决上述问题,本发明采用一种用于大尺寸三维编织预制体致密化的致密装置,包括周向设置的若干伸缩机械臂、驱动伸缩机械臂竖直移动的升降装置、驱动升降装置转动的旋转装置,所述伸缩机械臂包括伸缩大臂、伸缩小臂和推动气缸,所述伸缩大臂一端连接于升降装置,另一端倾斜向上延伸,所述伸缩大臂的输出端与伸缩小臂固定端的臂身铰接,伸缩小臂固定端的端部与伸推动气缸一端铰接,推动气缸另一端与伸缩大臂输出端的臂身铰接,致密预制体时,所述伸缩大臂延伸驱动伸缩小臂定位至纱线花结下端,所述伸缩小臂向外延伸至完全托住单层纱线的所有花结。
3、进一步的,所述旋转装置包括环形齿轮导轨、旋转驱动电机和传动齿轮,所述传动齿轮设置于旋转驱动电机输出端并与环形齿轮导轨啮合,所述升降装置与环形齿轮导轨固定连接,旋转驱动电机驱动传动齿轮转动,传动齿轮带动环形齿轮导轨转动,从而带动升降装置随环形齿轮导轨周向环形运动。
4、进一步的,所述升降装置包括升降滑台、丝杆、升降驱动电机、下底板,所述丝杆竖直延伸,所述升降滑台与丝杆螺纹连接,升降驱动装置驱动丝杆转动,从而驱动升降滑台沿竖直方向移动,所述升降驱动电机固定设置于下底板上,且下底板与环形齿轮导轨固定连接,所述伸缩大臂固定端连接于升降滑台上。
5、进一步的,所述伸缩大臂与升降装置之间设置角度调节装置,所述角度调节装置包括固定在升降滑台的推动电缸、设置于推动电缸输出端的导向轴、套设于导向轴上的滑块,所述滑块通过连接杆与伸缩大臂臂身铰接,伸缩大臂固定端与升降滑台铰接,所述推动电缸推动滑块在导向轴上移动,从而调整伸缩大臂的倾斜角度。
6、进一步的,所述伸缩大臂和伸缩小臂均包括伸缩驱动装置,所述伸缩驱动装置包括设置于伸缩大臂或伸缩小臂固定端的伸缩电机、设置于伸缩电机输出端的齿轮、与伸缩大臂或伸缩小臂输出端固定连接的齿条,齿轮与齿条啮合,所述伸缩电机通过齿轮驱动齿条移动,从而驱动伸缩大臂或伸缩小臂输出端的伸缩。
7、进一步的,该装置还包括底层框架,所述底层框架包括连接部和固定连接于连接部底端的支撑部,所述环形齿轮导轨设置于连接部底部,所述连接部顶部设置环形导轨,所述丝杆顶部连接上顶板,所述上顶板设置于环形导轨内,并沿环形导轨移动。所述连接部为圆柱形立柱,所述环形齿轮导轨套设于圆柱形立柱底部,所述环形导轨套设于圆柱形立柱顶部,所述圆柱形立柱中空设置。所述支撑部为六边形框式结构架。
8、进一步的,所述伸缩大臂固定端设置挑臂振动装置,挑臂振动装置包括振动电机,所述振动电机用于使伸缩机械臂产生振动。
9、有益效果:本发明相对于现有技术,其显著优点是通过伸缩机械臂延伸扩大装置致密范围,至完全托住单层所有花节,旋转装置移动伸缩机械臂切换需致密的花节,用于适应复杂的大尺寸预制体,对大尺寸预制体进行预致密操作;提高了整体大尺寸编织装备的自动化程度,提高了编织精度和编织效率,提高了编织质量。
技术特征:
1.一种用于大尺寸三维编织预制体致密化的致密装置,其特征在于,包括周向设置的若干伸缩机械臂(3)、驱动伸缩机械臂竖直移动的升降装置(2)、驱动升降装置转动的旋转装置(4),所述伸缩机械臂(3)包括伸缩大臂(18)、伸缩小臂(19)和推动气缸(23),所述伸缩大臂(18)一端连接于升降装置(2),另一端倾斜向上延伸,所述伸缩大臂的输出端与伸缩小臂固定端的臂身铰接,伸缩小臂固定端的端部与伸推动气缸(23)一端铰接,推动气缸(23)另一端与伸缩大臂输出端的臂身铰接,致密预制体时,所述伸缩大臂(18)延伸驱动伸缩小臂定位至纱线花结下端,所述伸缩小臂(19)向外延伸至完全托住单层纱线的所有花结。
2.根据权利要求1所述的致密装置,其特征在于,所述旋转装置(4)包括环形齿轮导轨(9)、旋转驱动电机(10)和传动齿轮,所述传动齿轮设置于旋转驱动电机输出端并与环形齿轮导轨(9)啮合,所述升降装置与环形齿轮导轨(9)固定连接,旋转驱动电机(10)驱动传动齿轮转动,传动齿轮带动环形齿轮导轨转动,从而带动升降装置随环形齿轮导轨周向环形运动。
3.根据权利要求2所述的致密装置,其特征在于,所述升降装置(2)包括升降滑台(20)、丝杆(16)、升降驱动电机(13)、下底板(17),所述丝杆(16)竖直延伸,所述升降滑台(20)与丝杆(16)螺纹连接,升降驱动装置驱动丝杆(16)转动,从而驱动升降滑台(20)沿竖直方向移动,所述升降驱动电机(13)固定设置于下底板(17)上,且下底板(17)与环形齿轮导轨(9)固定连接,所述伸缩大臂(18)固定端连接于升降滑台(20)上。
4.根据权利要求3所述的致密装置,其特征在于,所述伸缩大臂与升降装置(2)之间设置角度调节装置,所述角度调节装置包括固定在升降滑台(20)的推动电缸(32)、设置于推动电缸(32)输出端的导向轴(29)、套设于导向轴上的滑块(31),所述滑块(31)通过连接杆(3)与伸缩大臂(18)臂身铰接,伸缩大臂(18)固定端与升降滑台铰接,所述推动电缸(32)推动滑块(31)在导向轴上移动,从而调整伸缩大臂(18)的倾斜角度。
5.根据权利要求1所述的致密装置,其特征在于,所述伸缩大臂和伸缩小臂均包括伸缩驱动装置,所述伸缩驱动装置包括设置于伸缩大臂或伸缩小臂固定端的伸缩电机、设置于伸缩电机输出端的齿轮、与伸缩大臂或伸缩小臂输出端固定连接的齿条,齿轮与齿条啮合,所述伸缩电机通过齿轮驱动齿条移动,从而驱动伸缩大臂或伸缩小臂输出端的伸缩。
6.根据权利要求3所述的致密装置,其特征在于,还包括底层框架(1),所述底层框架(1)包括连接部(5)和固定连接于连接部底端的支撑部(7),所述环形齿轮导轨(9)设置于连接部(5)底部,所述连接部(5)顶部设置环形导轨(6),所述丝杆(16)顶部连接上顶板(12),所述上顶板(12)设置于环形导轨(6)内,并沿环形导轨移动。
7.根据权利要求6所述的致密装置,其特征在于,所述连接部(5)为圆柱形立柱,所述环形齿轮导轨(9)套设于圆柱形立柱底部,所述环形导轨(6)套设于圆柱形立柱顶部,所述圆柱形立柱中空设置。
8.根据权利要求6所述的致密装置,其特征在于,所述支撑部(7)为六边形框式结构架。
9.根据权利要求1所述的致密装置,其特征在于,所述伸缩大臂固定端设置挑臂振动装置,挑臂振动装置包括振动电机(22),所述振动电机用于使伸缩机械臂产生振动。
技术总结
本发明公开了一种用于大尺寸三维编织预制体致密化的致密装置,包括周向设置的若干伸缩机械臂、驱动伸缩机械臂竖直移动的升降装置、驱动升降装置转动的旋转装置,伸缩机械臂包括伸缩大臂、伸缩小臂和推动气缸,伸缩大臂一端连接于升降装置,另一端倾斜向上延伸,伸缩大臂的输出端与伸缩小臂固定端的臂身铰接,伸推动气缸两端分别铰接伸缩大臂和伸缩小臂,致密预制体时,伸缩小臂向外延伸至完全托住单层纱线的所有花结。伸缩机械臂延伸扩大至完全托住单层所有花节,旋转装置移动伸缩机械臂切换需致密的花节,适应复杂的大尺寸预制体;提高了整体大尺寸编织装备的自动化程度,提高了编织精度和编织效率,提高了编织质量。
技术研发人员:单忠德,孙正,刘家乐,孙宪鹏,周征西
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!