一种全自动高速碌头机的制作方法
本技术涉及缝纫,尤其涉及一种全自动高速碌头机。
背景技术:
1、目前在制衣行业中,包含有最高技术工艺的“碌头”,此工艺在人手进行车缝过程中以往都是人工手动上丈根,手动控边,手动脱料,手工掌握布料拉力,不仅占用车缝时间,而且很难掌握布料拉力的均匀度,且增加了人工的劳动力,以及降低了生产效率;
2、所有的操作均由人工操作完成成品的车缝,对生产线无法实现工厂的半自动化或自动化生产。
技术实现思路
1、本实用新型的目的是解决现有技术中存在的缺点,而提出的一种全自动高速碌头机。
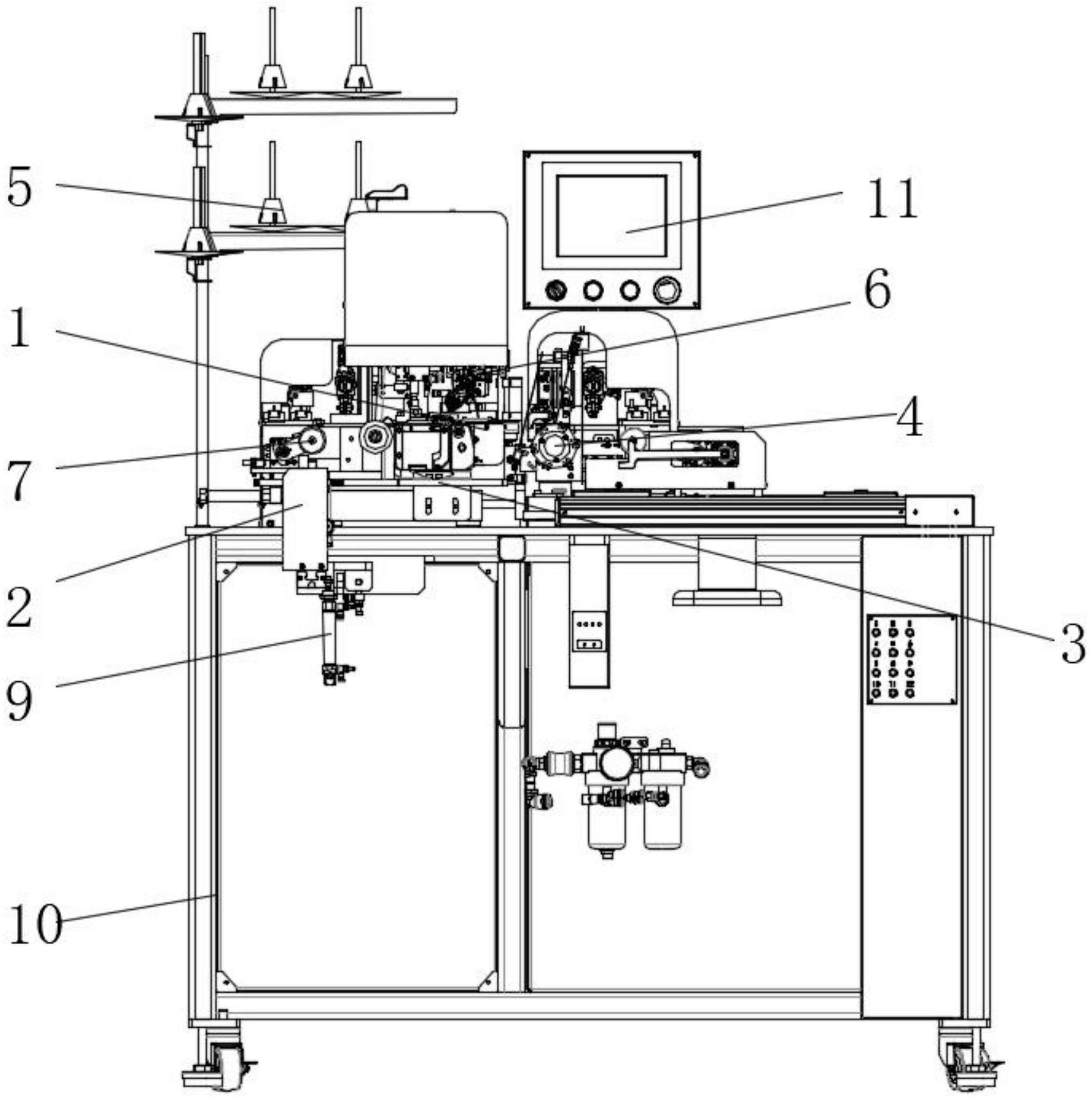
2、为了实现上述目的,本实用新型采用了如下技术方案:一种全自动高速碌头机,包括机架,所述机架的顶部外表面分别固定安装有缝纫机头、左侧上料组件、融位导向组件、右侧上料组件、小纠偏轮组件、裤身驱动组件、融位纠偏组件和取退料组件,所述机架的上表面固定安装有放线架和操作箱。
3、进一步的,所述左侧上料组件包括与机架固定连接的第一勾爪支架,所述第一勾爪支架的外表面依次固定安装有第一勾爪推动轨道和第一勾爪推动气缸,所述第一勾爪推动气缸的活动端固定连接有与第一勾爪推动轨道滑动连接的第一推动连接板,所述第一推动连接板的外表面固定安装有第一上料勾爪,且所述第一上料勾爪的外表面固定安装有与第一上料勾爪相配合的第一勾爪张合气缸。
4、进一步的,所述右侧上料组件包括与机架固定连接的第二勾爪支架,所述第二勾爪支架的外表面依次固定安装有第二勾爪推动轨道和第二勾爪推动气缸,所述第二勾爪推动气缸的活动端固定连接有与第二勾爪推动轨道滑动连接的第二推动连接板,所述第二推动连接板的外表面固定安装有第二上料勾爪,且所述第二上料勾爪的外表面固定安装有与第二上料勾爪相配合的第二勾爪张合气缸,所述第二推动连接板的外表面固定安装有测厚仪、纠偏感应器和转动连接有裤身纠偏轮。
5、进一步的,所述右侧上料组件还包括固定安装在第二勾爪支架外表面的裤身拉伸模组,所述裤身拉伸模组的外表面转动连接有丈根驱动轮,所述第二勾爪支架的外表面固定安装有与丈根驱动轮相配合的丈根驱动电机,所述裤身拉伸模组的外表面固定安装有裤身转弯展开吹气嘴。
6、进一步的,所述小纠偏轮组件包括与机架固定连接的纠偏轮支架,所述纠偏轮支架的外表面固定安装有纠偏轮推动气缸,所述纠偏轮推动气缸的活动端固定连接有纠偏轮步进电机,所述纠偏轮步进电机的输出轴固定连接有小纠偏轮本体,所述纠偏轮支架的外表面一侧固定安装有辅助部件气缸,所述纠偏轮支架的外表面一侧固定安装有辅助部件轨道,所述辅助部件气缸的活动端分别固定连接有与辅助部件轨道滑动连接的丈根定位辅助部件和丈根导位辅助部件。
7、进一步的,所述裤身驱动组件包括与机架固定连接的连接板,连接板的上表面固定安装有推进轨道和推进气缸,所述推进气缸的活动端固定连接有与推进轨道滑动连接的裤身驱动轮支架,所述裤身驱动轮支架的外表面固定安装有裤身驱动轮电机,所述裤身驱动轮电机的输出轴转动连接有裤身驱动轮本体,所述裤身驱动轮支架的外表面转动连接有与裤身驱动轮本体相配合的裤身被动轮本体。
8、进一步的,所述融位纠偏组件包括与机架固定连接的融位纠偏支架,所述融位纠偏支架的外表面依次转动连接有融位驱动电机和融位推进气缸,所述融位推进气缸的活动端与融位驱动电机的外表面转动连接,所述融位驱动电机的输出轴固定连接有融位轮,所述融位纠偏支架的外表面固定安装有转动轴心,所述融位纠偏支架的外表面固定安装有丈根辅助气缸,所述丈根辅助气缸的活动端固定连接有丈根辅助板。
9、进一步的,所述取退料组件包括与机架固定连接的夹手推动气缸和夹手推动轨道,所述夹手推动气缸的活动端固定连接有与夹手推动轨道滑动连接的夹手支架,所述夹手支架的外表面固定安装有夹手旋转气缸,所述夹手旋转气缸的活动端固定连接有夹手气缸,所述夹手气缸的活动端固定连接有夹手本体。
10、本实用新型的有益效果:
11、本实用新型在使用时,该全自动高速碌头机,替代以往的人工手动上丈根,手动控边,手动脱料,手工掌握布料拉力,占用车缝时间,改为一边车缝一边上丈根,自动控制张力,自动控边,自动脱料,统筹了车缝时间,并且车缝过程中采用了高科技识别系统定位,使车缝更加准确快捷,提高生产质量,以往一个人控制一台机器,现在使用了本设备,实现一个人控制两台机器,每件产品生产时间也缩短了,大大提高生产效率,节省人工成本。
技术特征:
1.一种全自动高速碌头机,包括机架(10),其特征在于:所述机架(10)的顶部外表面分别固定安装有缝纫机头(1)、左侧上料组件(2)、融位导向组件(3)、右侧上料组件(4)、小纠偏轮组件(6)、裤身驱动组件(7)、融位纠偏组件(8)和取退料组件(9),所述机架(10)的上表面固定安装有放线架(5)和操作箱(11)。
2.根据权利要求1所述的一种全自动高速碌头机,其特征在于:所述左侧上料组件(2)包括与机架(10)固定连接的第一勾爪支架(21),所述第一勾爪支架(21)的外表面依次固定安装有第一勾爪推动轨道(22)和第一勾爪推动气缸(23),所述第一勾爪推动气缸(23)的活动端固定连接有与第一勾爪推动轨道(22)滑动连接的第一推动连接板(24),所述第一推动连接板(24)的外表面固定安装有第一上料勾爪(25),且所述第一上料勾爪(25)的外表面固定安装有与第一上料勾爪(25)相配合的第一勾爪张合气缸(26)。
3.根据权利要求1所述的一种全自动高速碌头机,其特征在于:所述右侧上料组件(4)包括与机架(10)固定连接的第二勾爪支架(41),所述第二勾爪支架(41)的外表面依次固定安装有第二勾爪推动轨道(42)和第二勾爪推动气缸(43),所述第二勾爪推动气缸(43)的活动端固定连接有与第二勾爪推动轨道(42)滑动连接的第二推动连接板(44),所述第二推动连接板(44)的外表面固定安装有第二上料勾爪(45),且所述第二上料勾爪(45)的外表面固定安装有与第二上料勾爪(45)相配合的第二勾爪张合气缸(46),所述第二推动连接板(44)的外表面固定安装有测厚仪(47)、纠偏感应器(48)和转动连接有裤身纠偏轮(49)。
4.根据权利要求3所述的一种全自动高速碌头机,其特征在于:所述右侧上料组件(4)还包括固定安装在第二勾爪支架(41)外表面的裤身拉伸模组(410),所述裤身拉伸模组(410)的外表面转动连接有丈根驱动轮(411),所述第二勾爪支架(41)的外表面固定安装有与丈根驱动轮(411)相配合的丈根驱动电机(412),所述裤身拉伸模组(410)的外表面固定安装有裤身转弯展开吹气嘴(413)。
5.根据权利要求1所述的一种全自动高速碌头机,其特征在于:所述小纠偏轮组件(6)包括与机架(10)固定连接的纠偏轮支架(61),所述纠偏轮支架(61)的外表面固定安装有纠偏轮推动气缸(62),所述纠偏轮推动气缸(62)的活动端固定连接有纠偏轮步进电机(63),所述纠偏轮步进电机(63)的输出轴固定连接有小纠偏轮本体(64),所述纠偏轮支架(61)的外表面一侧固定安装有辅助部件气缸(65),所述纠偏轮支架(61)的外表面一侧固定安装有辅助部件轨道(66),所述辅助部件气缸(65)的活动端分别固定连接有与辅助部件轨道(66)滑动连接的丈根定位辅助部件(67)和丈根导位辅助部件(68)。
6.根据权利要求1所述的一种全自动高速碌头机,其特征在于:所述裤身驱动组件(7)包括与机架(10)固定连接的连接板,连接板的上表面固定安装有推进轨道(71)和推进气缸(72),所述推进气缸(72)的活动端固定连接有与推进轨道(71)滑动连接的裤身驱动轮支架(73),所述裤身驱动轮支架(73)的外表面固定安装有裤身驱动轮电机(74),所述裤身驱动轮电机(74)的输出轴转动连接有裤身驱动轮本体(75),所述裤身驱动轮支架(73)的外表面转动连接有与裤身驱动轮本体(75)相配合的裤身被动轮本体(76)。
7.根据权利要求1所述的一种全自动高速碌头机,其特征在于:所述融位纠偏组件(8)包括与机架(10)固定连接的融位纠偏支架(81),所述融位纠偏支架(81)的外表面依次转动连接有融位驱动电机(82)和融位推进气缸(83),所述融位推进气缸(83)的活动端与融位驱动电机(82)的外表面转动连接,所述融位驱动电机(82)的输出轴固定连接有融位轮(84),所述融位纠偏支架(81)的外表面固定安装有转动轴心(85),所述融位纠偏支架(81)的外表面固定安装有丈根辅助气缸(86),所述丈根辅助气缸(86)的活动端固定连接有丈根辅助板(87)。
8.根据权利要求1所述的一种全自动高速碌头机,其特征在于:所述取退料组件(9)包括与机架(10)固定连接的夹手推动气缸(91)和夹手推动轨道(92),所述夹手推动气缸(91)的活动端固定连接有与夹手推动轨道(92)滑动连接的夹手支架(93),所述夹手支架(93)的外表面固定安装有夹手旋转气缸(94),所述夹手旋转气缸(94)的活动端固定连接有夹手气缸(95),所述夹手气缸(95)的活动端固定连接有夹手本体(96)。
技术总结
本技术公开了一种全自动高速碌头机,包括机架,所述机架的顶部外表面分别固定安装有缝纫机头、左侧上料组件、融位导向组件、右侧上料组件、小纠偏轮组件、裤身驱动组件、融位纠偏组件和取退料组件,所述机架的上表面固定安装有放线架和操作箱。本技术中,替代以往的人工手动上丈根,手动控边,手动脱料,手工掌握布料拉力,占用车缝时间,改为一边车缝一边上丈根,自动控制张力,自动控边,自动脱料,统筹了车缝时间,并且车缝过程中采用了高科技识别系统定位,使车缝更加准确快捷,提高生产质量,以往一个人控制一台机器,现在使用了本设备,实现一个人控制两台机器,每件产品生产时间也缩短了,大大提高生产效率,节省人工成本。
技术研发人员:邱允恭
受保护的技术使用者:东莞美科研创科技有限公司
技术研发日:20221110
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!