一种自动化贴袋绷缝机器人设备的制作方法
本发明涉及服装生产的自动化设备,尤其涉及一种自动化贴袋绷缝机器人设备。
背景技术:
1、在贴袋绷缝生产环节中,贴袋是指将制作服装的口袋时,将口袋裁片与衣片缝制在一起的加工过程。绷缝是指一种缝制线迹,是用绷缝机加工出的一种缝制线迹。贴袋绷缝就是指用绷缝线迹,将口袋裁片与衣片缝制到一起的工序。
2、现有技术中,贴袋机可以将口袋与衣片以“锁式平缝”的线迹进行缝制,其原理为利用特定形状的模具压住口袋裁片和衣片,通过两轴直线模组平移带动裁片在平缝式缝纫机针下方移动,同时缝制出指定的形状。但是此种机器只能完成“贴袋平缝”的工序,其原因在于这种机器驱动裁片运动的机构是两轴直线模组,只能进行平移而不能进行旋转。且绷缝机受到其机械结构限制,只能允许裁片沿着单一方向运动,需要裁片能够在平面上旋转角度来缝制不同的轨迹。存在不能驱动裁片在平面上运动和旋转,不能实现用绷缝机缝制不同的轨迹的问题。
3、例如,在中国专利文献上公开的“一种绷缝机”,其公告号为cn110699870a,其申请日为2019年10月29日,该发明包括绷缝机主体、定位装置、防尘装置和支撑装置,所述绷缝机主体左侧顶端设有定位装置,所述定位装置包括固定板、第一弹簧、滑板、连接杆、压板、定位针、钢条、限位块、限位板和限位槽,所述绷缝机主体左端面顶端固定连接有固定板,所述固定板顶端面内侧固定连接有第一弹簧,本发明中,通过设置的压板和定位针,这种设置配合压板与定位针的固定连接、第一弹簧对滑板的弹力、滑板与连接杆的滑动连接和钢条与限位块的固定连接,在对制衣布料进行绷缝时可以对绷缝部位进行压紧和定位,从而避免了布料绷缝时出现绷缝位置偏移的现象,保证了制衣布料的绷缝质量。但是存在不能驱动裁片在平面上运动和旋转,不能实现用绷缝机缝制不同的轨迹的问题。
技术实现思路
1、针对现有技术不能驱动裁片在平面上运动和旋转,不能实现用绷缝机缝制不同的轨迹的不足,本申请提出了一种自动化贴袋绷缝机器人设备,能驱动裁片在平面上运动和旋转,以实现用绷缝机缝制不同的轨迹。
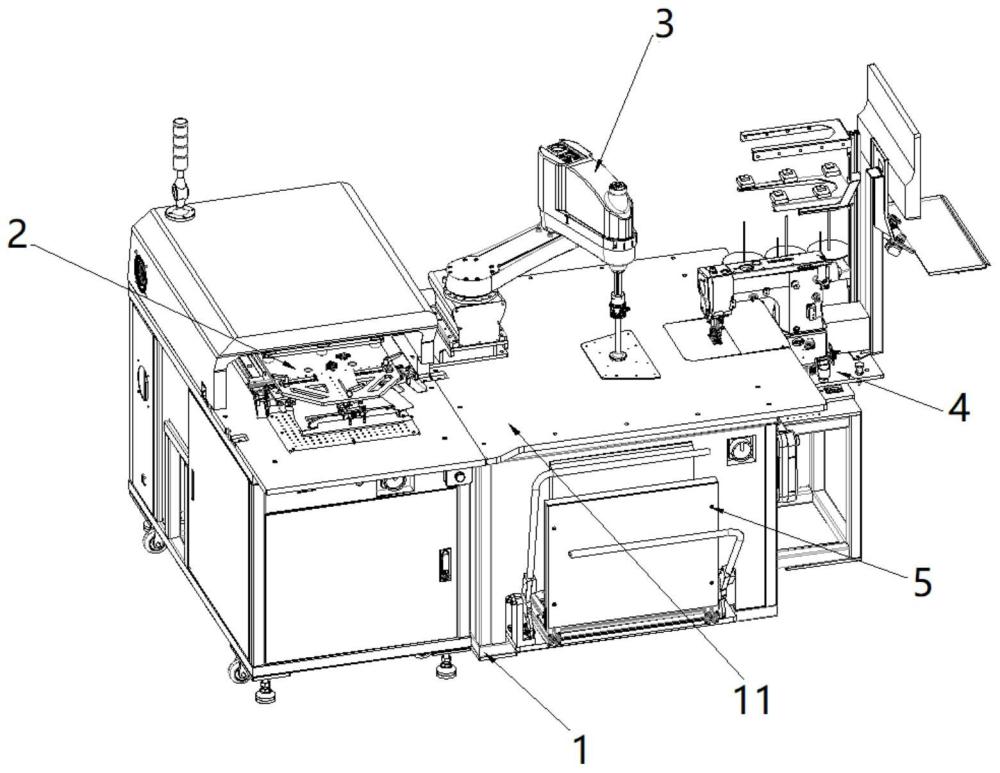
2、以下是本发明的技术方案,一种自动化贴袋绷缝机器人设备,包括:
3、机台,用于放置其他设备,便于裁片的运动;
4、折叠设备,用于设置裁片的相对位置并按压裁片,设置于机台一端;
5、机器人,用于按压和移动裁片,设置于机台中部;
6、缝制设备,用于缝制裁片,设置于机台另一端。
7、本方案中,机台固定设置于地面上,折叠设备设置于机台的一端,缝制设备设置于机台的另一端,机器人设置于机台上且位于折叠设备和缝制设备之间。通过机器人位置的设置,使得机器人通过缝制模具将裁片从折叠设备处移动至缝制设备处,并且裁片在平面上运动和旋转,进而完成裁片的缝制,以实现用绷缝机缝制不同的轨迹。
8、作为优选,机台的台面为抗倍特板或钢板。
9、本方案中,台面可以采用抗倍特板或钢板等硬质光滑材质,减少机器人按压移动裁片时对裁片的损伤。
10、作为优选,折叠设备中,板面设置于机台上,板面中部设置折袋板,折袋板连接驱动气缸,板面一侧设置直线运动机构,直线运动机构连接主舌刀和侧舌刀,主舌刀和侧舌刀连接驱动气缸和电机。
11、本方案中,将第一裁片(通常为口袋裁片)和第二裁片(通常为衣片)铺放到折叠设备中,通过驱动气缸驱动折袋板进行动作,将第一裁片的边缘翻折到舌刀下方,通过主舌刀和侧舌刀的运动,将折过边的第一裁片压在第二裁片上,从而实现设置裁片的相对位置并按压裁片。
12、作为优选,机器人中,底座固定连接机台和机械手臂,机械手臂通过快换夹具连接缝制模具。
13、本方案中,机器人通过缝制模具按压第一裁片和第二裁片,此时,主舌刀、侧舌刀从第一裁片和第二裁片中抽出,机器人用缝制模具压着第一裁片和第二裁片在台面移动至缝制设备处,此时开启缝制设备的绷缝机。机器人根据缝制模具计算缝制轨迹,按照缝制轨迹控制缝制模具进行移动和旋转,从而使得缝制模具按压的第一裁片和第二裁片在绷缝机进行缝合。
14、作为优选,缝制设备中,调节机构连接绷缝机,绷缝机的针板和台面等高,绷缝机上方设置有断线检测机构,断线检测机构连接供线机构且位于供线机构的下方。
15、作为优选,还包括:收料设备,用于收取缝制后的裁片,设置于机台侧面。
16、本方案中,收料设备设置于机台的侧面,包括拨料杆、压料杆和放料平台。拨料杆、压料杆、放料平台均由驱动气缸驱动运动,通过拨料杆将缝合好的裁片拨到收料设备的平台上,收料平台在水平方向运动来承接裁片,通过压料杆压紧,防止堆叠的裁片滑落。
17、作为优选,主舌刀和侧舌刀为直线滚珠丝杠模组且为不锈钢材质。
18、作为优选,机器人至少具有4个自由度,快换夹具采用气动式夹紧机构。
19、作为优选,断线检测机构为光电感应传感器或摩擦感应传感器。
20、一种自动化贴袋绷缝机器人设备运行方法,包括以下步骤:
21、s1:设置第一裁片和第二裁片,将第一裁片的边缘翻折并压在第二裁片上;
22、s2:缝制模具按压第一裁片和第二裁片并移动至缝制区域;
23、s3:基于缝制模具设置缝制轨迹,基于缝制轨迹移动和旋转缝制模具,通过缝制设备缝制第一裁片和第二裁片;
24、s4:将缝制后的第一裁片和第二裁片移动至收料区域。
25、本发明的有益效果:
26、1、能够将第一裁片设置于第二裁片上,使得面料进行有序堆叠,便于对若干个面料进行缝制;
27、2、能够通过机器人移动裁片,降低了人力需求,提高了缝制效率;
28、3、能够根据缝制模具缝制成不同的型号规格,提高了适用性;
29、4、能够固定缝制设备的位置,通过移动和旋转缝制模具完成面料的缝制,降低了设备要求。
技术特征:
1.一种自动化贴袋绷缝机器人设备,其特征在于,包括:
2.根据权利要求1所述的一种自动化贴袋绷缝机器人设备,其特征在于,机台的台面为抗倍特板或钢板。
3.根据权利要求1或2所述的一种自动化贴袋绷缝机器人设备,其特征在于,折叠设备中,板面设置于机台上,板面中部设置折袋板,折袋板连接驱动气缸,板面一侧设置直线运动机构,直线运动机构连接主舌刀和侧舌刀,主舌刀和侧舌刀连接驱动气缸和电机。
4.根据权利要求3所述的一种自动化贴袋绷缝机器人设备,其特征在于,机器人中,底座固定连接机台和机械手臂,机械手臂通过快换夹具连接缝制模具。
5.根据权利要求1所述的一种自动化贴袋绷缝机器人设备,其特征在于,缝制设备中,调节机构连接绷缝机,绷缝机的针板和台面等高,绷缝机上方设置有断线检测机构,断线检测机构连接供线机构且位于供线机构的下方。
6.根据权利要求1或5所述的一种自动化贴袋绷缝机器人设备,其特征在于,还包括:收料设备,用于收取缝制后的裁片,设置于机台侧面。
7.根据权利要求3所述的一种自动化贴袋绷缝机器人设备,其特征在于,主舌刀和侧舌刀为直线滚珠丝杠模组且为不锈钢材质。
8.根据权利要求4所述的一种自动化贴袋绷缝机器人设备,其特征在于,机器人至少具有4个自由度,快换夹具采用气动式夹紧机构。
9.根据权利要求5所述的一种自动化贴袋绷缝机器人设备,其特征在于,断线检测机构为光电感应传感器或摩擦感应传感器。
10.一种自动化贴袋绷缝机器人设备运行方法,适用于如权利要求1-9任一项所述的一种自动化贴袋绷缝机器人设备,其特征在于,包括以下步骤:
技术总结
本发明公开了一种自动化贴袋绷缝机器人设备,包括:机台,用于放置其他设备,便于裁片的运动;折叠设备,用于设置裁片的相对位置并按压裁片,设置于机台一端;机器人,用于按压和移动裁片,设置于机台中部;缝制设备,用于缝制裁片,设置于机台另一端。本发明的有益效果:能驱动裁片在平面上运动和旋转,以实现用绷缝机缝制不同的轨迹。
技术研发人员:李富海,徐绍宸,张志坚,杨玉梅
受保护的技术使用者:吸力奇迹(浙江)智能科技有限公司
技术研发日:
技术公布日:2024/12/17
- 还没有人留言评论。精彩留言会获得点赞!