一种缝纫机的膝靠装置控制方法、系统、装置和介质与流程
本申请涉及缝纫机控制领域,特别涉及一种缝纫机的膝靠装置控制方法、系统、装置和介质。
背景技术:
1、当前,在缝纫机控制抬压脚中主要采用的是脚踏控制抬压脚抬起放下,但是有些工艺在缝纫过梗过厚的时候,需要抬压脚抬起,用脚踏板控制抬压脚会影响缝纫效率,工艺需求需要加入膝靠装置控制胎压脚,目前膝靠装置主要为机械式或者电控式,但线性体验感差,不利于缝纫。
技术实现思路
1、本申请的目的是提供一种缝纫机的膝靠装置控制方法、系统、计算机可读存储介质和应用于缝纫机的电控膝靠装置,能够优化缝纫机中膝靠装置的线性体验感。
2、为解决上述技术问题,本申请提供一种缝纫机的膝靠装置控制方法,具体技术方案包括:
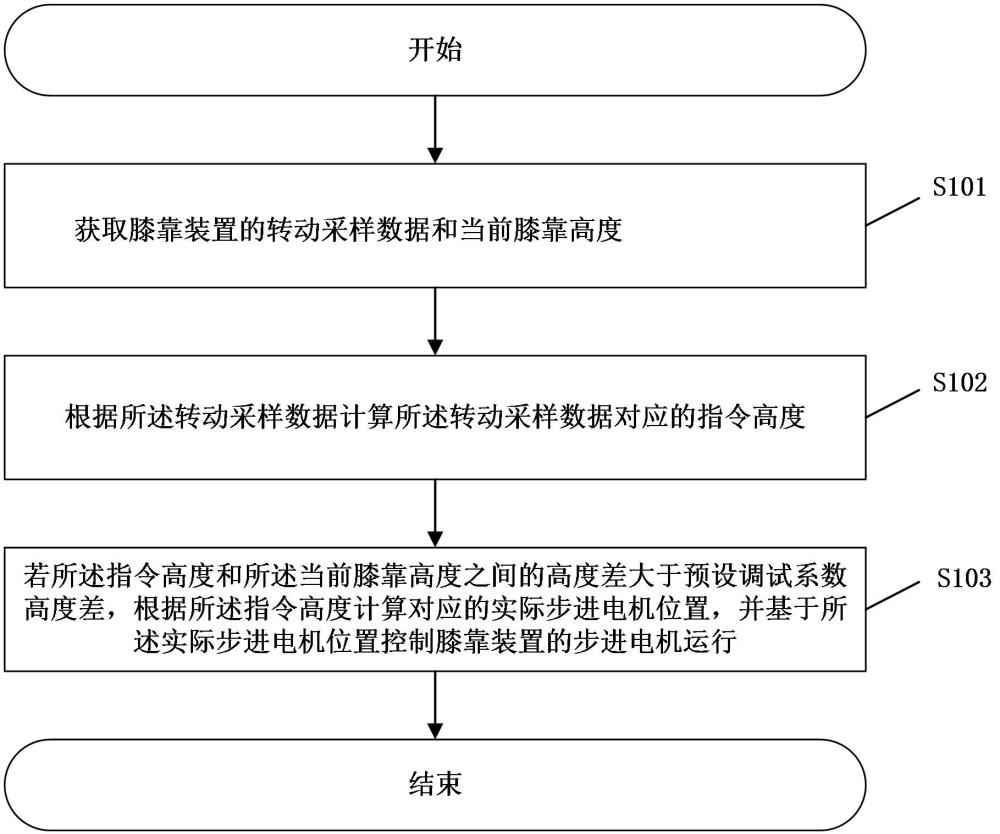
3、获取膝靠装置的转动采样数据和当前膝靠高度;
4、根据所述转动采样数据计算所述转动采样数据对应的指令高度;
5、若所述指令高度和所述当前膝靠高度之间的高度差大于预设调试系数高度差,根据所述指令高度计算对应的实际步进电机位置,并基于所述实际步进电机位置控制膝靠装置的步进电机运行。
6、可选的,所述转动采样数据的获取方式为:
7、设定采样频率;
8、以所述采样频率周期性获取膝靠装置的转动采样数据 。
9、可选的,获取膝靠装置的转动采样数据包括:
10、利用霍尔传感器监测膝靠装置的转动角度;
11、调用换算关系式将所述转动角度转化为霍尔模拟量;所述换算关系式为膝靠装置的转动角度和对应电压值之间的换算关系。
12、可选的,根据所述转动采样数据计算所述转动采样数据对应的指令高度之前,还包括:
13、根据历史转动采样数据调用滤波计算公式对所述转动采样数据作滤波处理;
14、所述滤波计算公式为:
15、kneepressadc = k1*kneepressadcold /(1-k2);
16、其中,kneepressadcold为上一次采样时的历史转动采样数据,kneepressadc为本次采样时的转动采样数据,k1和k2分别为第一滤波比例系数和第二滤波比例系数。
17、可选的,还包括:
18、获取或设定所述预设调试系数高度差;其中,所述预设调试系数高度差越小,所述膝靠装置的步进电机运行线性越强。
19、可选的,所述根据所述指令高度计算对应的实际步进电机位置包括:
20、确定所述步进电机的电机参数;
21、利用getpresstheta函数根据所述指令高度和所述电机参数计算满足所述指令高度所需脉冲数,并基于所述脉冲数确定实际步进电机位置。
22、可选的,根据所述转动采样数据计算所述转动采样数据对应的指令高度包括:
23、将初始电压采样值和所述差值代入高度计算公式,输出得到所述转动采样数据对应的指令高度;
24、所述高度计算公式为:
25、kneepressheight= (ad_star-kneepressadc)/ adheight;
26、其中,kneepressheight为指令高度,ad_star为初始电压采样值,adheight为高度差。
27、本申请还提供一种缝纫机的膝靠装置控制系统,包括:
28、数据获取模块,用于获取膝靠装置的转动采样数据和当前膝靠高度;
29、指令高度计算模块,用于根据所述转动采样数据计算所述转动采样数据对应的指令高度;
30、控制模块,用于若所述指令高度和所述当前膝靠高度之间的高度差大于预设调试系数高度差,根据所述指令高度计算对应的实际步进电机位置,并基于所述实际步进电机位置控制膝靠装置的步进电机运行。
31、本申请还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的缝纫机的膝靠装置控制方法的步骤。
32、本申请还提供一种应用于缝纫机的电控膝靠装置,包括存储器和处理器,所述存储器中存有计算机程序,所述处理器调用所述存储器中的计算机程序时实现如上所述的缝纫机的膝靠装置控制方法的步骤。
33、本申请提供一种缝纫机的膝靠装置控制方法,包括:获取膝靠装置的转动采样数据和当前膝靠高度;计算所述转动采样数据和历史转动采样数据的差值;根据所述转动采样数据计算所述转动采样数据对应的指令高度;若所述指令高度和所述当前膝靠高度之间的高度差大于预设调试系数高度差,根据所述指令高度计算对应的实际步进电机位置,并基于所述实际步进电机位置控制膝靠装置的步进电机运行。
34、本申请通过获取膝靠装置的转动采样数据,并于历史转动采样数据进行比对,将膝靠装置的转动转为模拟量进行计算,通过判定指令高度和当前膝靠高度的高度差和预设调试系数高度差的大小关系,对步进电机进行相应的控制,无需增加复杂元器件即可应用步进电机控制抬压脚,通过膝靠装置的转动采样数据映射控制步进抬压脚的位置,提高步进电机的运动线性度,保证步进电机的稳定运行,从而有利于提高缝纫效果和缝纫效率。
35、本申请还提供一种缝纫机的膝靠装置控制系统、计算机可读存储介质和应用于缝纫机的电控膝靠装置,具有上述有益效果,此处不再赘述。
技术特征:
1.一种缝纫机的膝靠装置控制方法,其特征在于,包括:
2.根据权利要求1所述的膝靠装置控制方法,其特征在于,所述转动采样数据的获取方式为:
3.根据权利要求2所述的膝靠装置控制方法,其特征在于,获取膝靠装置的转动采样数据包括:
4.根据权利要求2所述的膝靠装置控制方法,其特征在于,根据所述转动采样数据计算所述转动采样数据对应的指令高度之前,还包括:
5.根据权利要求1所述的膝靠装置控制方法,其特征在于,还包括:
6.根据权利要求1所述的膝靠装置控制方法,其特征在于,所述根据所述指令高度计算对应的实际步进电机位置包括:
7.根据权利要求4所述的膝靠装置控制方法,其特征在于,根据所述转动采样数据计算所述转动采样数据对应的指令高度包括:
8.一种缝纫机的膝靠装置控制系统,其特征在于,包括:
9.一种应用于缝纫机的电控膝靠装置,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被执行时实现如权利要求1至7任一项所述方法的步骤。
技术总结
本申请提供一种缝纫机的膝靠装置控制方法,包括:获取膝靠装置的转动采样数据和当前膝靠高度;计算转动采样数据和历史转动采样数据的差值;根据转动采样数据计算转动采样数据对应的指令高度;若指令高度和当前膝靠高度之间的高度差大于预设调试系数高度差,根据指令高度计算对应的实际步进电机位置,并基于实际步进电机位置控制膝靠装置的步进电机运行。本申请通过膝靠装置的转动采样数据映射控制步进抬压脚的位置,提高步进电机的运动线性度,保证步进电机的稳定运行,从而有利于提高缝纫效果和缝纫效率。本申请还提供一种缝纫机的膝靠装置控制系统、计算机可读存储介质和应用于缝纫机的电控膝靠装置,具有上述有益效果。
技术研发人员:王菲
受保护的技术使用者:浙江众邦机电科技有限公司
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!