一种机器人在墙面越障作业方法与流程
1.本发明涉及建筑施工、清洁的智能机器领域,具体为一种用于墙面作业的机器人。
背景技术:
2.在建筑墙面施工过程中,因高空作业的环境恶劣,工人劳动强度大,危险性较高,招用工困难,生产成本居高不下,从而导致企业竟争力下降。由于目前应用于建筑行业机器人较少,根据已公开专利(cn109736548a,cn109171543a,cn107829555a,cn106695830a)等,能够在高楼外墙面作业的机器人,均采用吸附固定或电磁固定,而高楼外墙面的砂石结构和不平整性,导致采用吸附固定的机器人可靠性低,采用电磁固定的机器人,因高楼层导致固定轨道难以安装,或采用垂悬等方法均难以应用,由于其作业环境工况复杂,致使机器人对场景的适应性提出更高要求。
技术实现要素:
3.为解决背景技术所述问题,本发明提供的一种机器人在墙面越障作业方法,其作业机器人通过在滚轮支架上安装雷达,并在作业行进中不断检测反馈,发现作业范围中存在的台阶等障碍,并在障碍前完成减速,打开安装于作业机器人底部的激光测距传感器,测量和反馈目标距离数据,由于其检测方向垂直于墙面,使其正好测量突出墙面与台阶等障碍的高度,经过系统软件的数据筛选,得出墙面与台阶等障碍顶面所产生的高度差值,并同时把差值产生位置记录为台阶厚度起点,当再次通过检测障碍顶面与墙体面的差值时,记录为台阶厚度的结束点并关闭激光,作业人通过雷达及激光测距传感器检测和数据反馈,经系统软件筛选墙面与台阶等障碍顶面所产生的数据差值,实现动作控制判断和所需跨越障碍的高度及厚度数据,从而构建了依据检测数据反馈和系统筛选差值的方法,控制作业机器人支撑轮依接触台阶等障碍时序伸缩避让,实现了较为复杂场景下越障作业的目的。
4.由于部分建筑墙体为玻璃建造而成,具有通透性且不对激光产生反射,致使激光测距时所测数据误差较大,作业机器人利支撑轮贴天墙面的长度数据,通过系统中的函数计算,并替代为墙面距离为基础数值,再对比与所测台阶等障碍顶面所产生的距离数据,利用系统筛选差值的方法来构建动作控制判断和跨越距离,从而解决了玻璃墙面测距数据不准的缺陷,实现玻璃墙体等环境下的作业。
附图说明
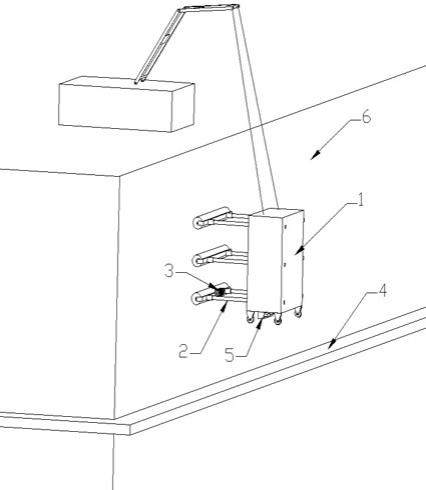
5.下面参考附图并结合实施例来详细说明本发明:图1为本发明示意图。
6.附图各部件标记为:作业机器人1,滚轮支架2,雷达3,台阶4,激光测距传感器5,墙面6。
具体实施方式
7.为使本发明技术特征便于了解,下面参考附图并结合具体实施例,进一步阐述本发明。请参考附图1,本发明提供的一种机器人在墙面越障作业方法,其作业机器人1通过在滚轮支架2上安装雷达3,并在作业行进中不断检测反馈,发现作业范围中存在的台阶4等障碍,并在障碍前完成减速,打开安装于作业机器人1底部的激光测距传感器5,不断测量和反馈距离数据,由于其检测方向垂直于墙面,使其正好测量突出墙面6与台阶4等障碍的高度,经过系统软件的数据筛选,并同时把差值产生位置记录为台阶4厚度起点,当再次通过检测台阶4等障碍顶面与墙面6的距离差值时,记录为台阶4厚度的结束点并关闭激光测距传感器5,作业人1通过雷达3及激光测距传感器5检测和数据反馈,经系统软件筛选墙面6与台阶4等障碍顶面所产生的数据差值, 实现动作控制判断和所需跨越的台阶4等障碍厚度数据,从而构建了根据检测反馈数据和通过系统筛选差值的方法,控制作业机器人1支撑轮依时序伸缩避让台阶4等障碍,实现了较为复杂场景下越障作业的目的。
8.以上实施例显示和描述了本发明的基本原理和主要结构特征,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
技术特征:
1.一种机器人在墙面越障作业方法,其特征在于:作业机器人通过在滚轮支架上安装雷达,并在作业行进中检测及反馈,发现作业前进范围中存在的台阶等障碍,通过减速并打开作业机器人底部的激光测距传感器,测量墙面与台阶等障碍顶面所产生的高度差值,并同时记录差值为台阶厚度起点,当再次检测台阶等障碍顶面与墙体面的差值时,记录为台阶厚度的结束点并关闭激光,作业人通过雷达及激光测距传感器检测和数据反馈,经系统软件筛选墙面与台阶等障碍顶面所产生的数据差值,实现动作控制判断和所需跨越障碍的高度及厚度数据,从而构建了依据检测数据反馈和系统筛选差值的方法,控制作业机器人支撑轮依接触台阶等障碍时序伸缩避让,实现了较为复杂场景下越障作业的目的;部分玻璃墙体不对激光产生反射,致使激光测距时所测数据误差较大,作业机器人利用支撑轮贴于墙面的长度数据,通过系统中的函数计算,并替代为墙面距离为基础数值,再对比与所测台阶等障碍顶面所产生的距离数据,利用差值运算的方法来构建动作控制判断和跨越高度。2.根据权利要求1所述的一种机器人在墙面越障作业方法,其特征在于:所述雷达通过不断检测后发现台阶等障碍,并在台阶等障碍前完成减速并打开激光测距传感器,通过测量墙面与台阶间的距离差作为动作控制判断,并记录差值起点位置,在下一个检测产生差值后关闭激光传感器,通过记录两个差值位置的距离作为台阶厚度。3.根据权利要求1所述的一种机器人在墙面越障作业方法,其特征在于:所述雷达检测方向与作业机器人行进方向一致。4.根据权利要求1所述的一种机器人在墙面越障作业方法,其特征在于:所述激光传感器安装于作业机器人前进方向的最顶端,其检测方向与墙面垂直。5.根据权利要求1所述的一种机器人在墙面越障作业方法,其特征在于:所述激光传感器在对玻璃墙体测距时,利用与墙面的支撑轮长主数据替代产生,所述支撑轮数据为台阶等障碍前支撑轮贴于墙面长度的实时数据,所述技撑轮长度数据由系统内部控制数据提供。
技术总结
一种机器人在墙面越障作业方法,其作业机器人通过在滚轮支架上安装雷达和底部的激光测距传感器,通过系统软件筛选所测距离差值,实现动作控制判断和所需跨越障碍的数据,从而构建了检测数据的反馈和系统筛选差值的方法,控制作业机器人实现复杂场景下越障作业目的。控制作业机器人实现复杂场景下越障作业目的。控制作业机器人实现复杂场景下越障作业目的。
技术研发人员:ꢀ(51)Int.Cl.E04F21/00
受保护的技术使用者:深圳市瑞河科技有限公司
技术研发日:2021.11.21
技术公布日:2022/2/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1