一种泊车机器人插臂和挡臂限位装置的制作方法
1.本实用新型属于侧叉泊车机器人领域,尤其涉及一种泊车机器人挡臂限位装置
背景技术:
2.目前,汽车保有量快速提升,城市停车位严重不足成为困扰城市发展的燃眉之急。随着停车需求的加大,人们对智能停车体验的要求也越来越极致。泊车机器人目前已陆续应用于智能车库中,它的作用是实现车辆在车库出入口与存车位之间的存取动作。
3.目前目前市场上的侧叉泊车机器人大多包含两个插臂和一个横梁的结构,一些侧叉泊车机器人还包含与插臂配套工作的挡臂,挡臂和插臂在横梁上由电机带动做水平运动。电机带动挡臂和插臂做水平运动时,如果没有良好的控制和监控,会导致挡臂和插臂位置脱离其工作范围,无法重新定位,因此需要一套装置限制挡臂和插臂产生过度的位移;另一方面,如果不对插臂和挡臂的运动进行限制,插臂和挡臂经常会发生碰撞,碰撞之后挡臂和插臂的位置会与程序内的位置不符,需要重新定位。
4.中国专利cn 207644358公布了一种智能泊车摆渡机器人,在主动摆臂的右侧的单摆臂支撑架上固定设置有主动摆臂外侧限位块。采用了限位块的方法限制插臂财产生过度位移。但是仅仅是一个铁块无法对插臂运动进行控制和监测。
技术实现要素:
5.针对上述存在的插臂产生过度位移、插臂和挡臂运动过程中发生碰撞的问题,本发明提供了一套泊车机器人插臂和挡臂限位装置。
6.为达此目的,本发明采用以下技术方案:
7.一种泊车机器人插臂和挡臂限位装置,包括安装有插臂和挡臂的机器人横梁,横梁左侧有左侧挡臂限位和左侧插臂限位以及左侧插臂挡臂防撞保护,横梁右侧有右侧挡臂限位和右侧插臂限位以及右侧插臂挡臂防撞保护。
8.其中左侧挡臂限位位于横梁上左挡臂运动的左侧极限位置,左侧插臂限位位于横梁上左插臂运动的右侧极限位置,左侧插臂挡臂防撞保护位于左挡臂和左插臂之间;
9.其中右侧挡臂限位位于横梁上右挡臂运动的右侧极限位置;右侧插臂限位位于横梁上右侧插臂运动的左侧极限位置,右侧插臂挡臂防撞保护位于右挡臂和右插臂之间;
10.其中,所述限位使用接近开关,能够检测范围内是否有金属,所述侧插臂挡臂防撞保护使用槽型光电,可检测金属物体,精度高。
11.其中,所述插臂数量为2,对称分布在横梁左右两侧挡臂的内侧,所述挡臂数量为2,对称分布在横梁左右两侧插臂的外侧。
12.其中,所述限位以及防撞保护采用螺丝固定安装于机器人横梁上。
13.其中,所述限位以及防撞保护通过电源线与工控机相连接,工控机根据电信号监测挡臂和插臂的位移是否在设定范围内,并对挡臂和插臂的运动采取相应的控制以及重新定位。
14.本发明相对于现有技术具有显著优点为:
15.1、可以限制挡臂和插臂的过度位移,防止挡臂和插臂发生碰撞。
16.2、便于工控机对插臂和挡臂的运动进行控制和监测以及重新定位。
附图说明
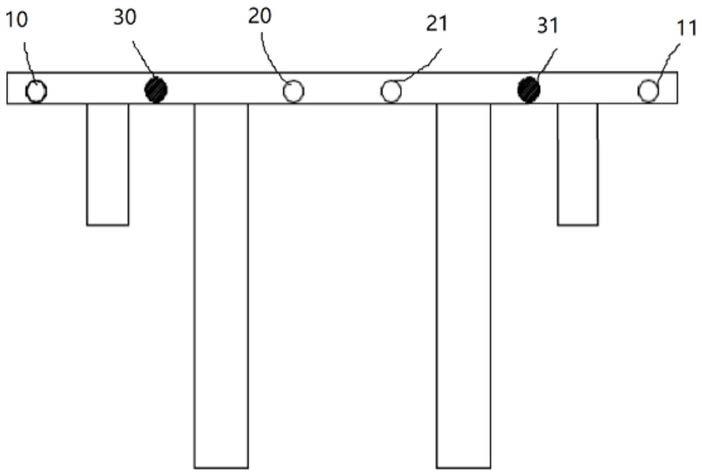
17.图1是本实用新型一种泊车机器人插臂和挡臂限位装置的结构示意图
18.其中,10为左侧挡臂限位,20为左侧插臂限位,30为左侧插臂挡臂防撞保护,11为右侧挡臂限位,21为右侧插臂限位,31为右侧插臂挡臂防撞保护。
具体实施方式
19.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
20.实施例1
21.一种泊车机器人插臂和挡臂限位装置,包括安装有插臂和挡臂的机器人横梁100,横梁左侧安装了左侧挡臂限位10和左侧插臂限位20以及左侧插臂挡臂防撞保护30,横梁右侧有右侧挡臂限位11和右侧插臂限位21以及右侧插臂挡臂防撞保护31。
22.所述左侧挡臂限位10为接近开关,能够检测范围内是否有金属。位于横梁左挡臂左侧运动的极限位置,防止左挡臂行走路程超过机器人横梁左侧允许位置。
23.所述右侧挡臂限位11为接近开关,能够检测范围内是否有金属。位于横梁右挡臂右侧运动的极限位置,防止右挡臂行走路程超过机器人横梁右侧允许位置。
24.所述左侧插臂限位20为接近开关,能够检测范围内是否有金属。位于横梁左侧插臂右侧运动的极限位置,防止左插臂行走路程超过机器人横梁左插臂允许的右侧位置。
25.所述右侧插臂限位21为接近开关,能够检测范围内是否有金属。位于横梁右侧插臂左侧运动的极限位置,防止右插臂行走路程超过机器人横梁右插臂允许的左侧位置。
26.图中30为左侧插臂挡臂防撞保护,位于左挡臂和左插臂之间,保护左插臂和左挡臂,使左插臂和左挡臂不会发生碰撞,使用槽型光电,可检测金属物体,精度高。
27.图中31为右侧插臂挡臂防撞保护,位于右挡臂和右插臂之间,保护右插臂和右挡臂,使右插臂和右挡臂不会发生碰撞,使用槽型光电,可检测金属物体,精度高。
技术特征:
1.一种泊车机器人插臂和挡臂限位装置,其特征在于:包括安装有插臂和挡臂的机器人横梁,横梁左侧有左侧挡臂限位和左侧插臂限位以及左侧插臂挡臂防撞保护,左侧挡臂限位位于横梁上左挡臂运动的左侧极限位置,左侧插臂限位位于横梁上左插臂运动的右侧极限位置,左侧插臂挡臂防撞保护位于左挡臂和左插臂之间;横梁右侧有右侧挡臂限位和右侧插臂限位以及右侧插臂挡臂防撞保护,右侧挡臂限位位于横梁上右挡臂运动的右侧极限位置;右侧插臂限位位于横梁上右侧插臂运动的左侧极限位置,右侧插臂挡臂防撞保护位于右挡臂和右插臂之间。2.根据权利要求1所述的泊车机器人插臂和挡臂限位装置,其特征在于:所述挡臂限位和插臂限位使用接近开关,所述插臂挡臂防撞保护使用槽型光电,所述挡臂限位和插臂限位以及插臂挡臂防撞保护通过电源线与工控机相连接。3.根据权利要求2所述的泊车机器人插臂和挡臂限位装置,其特征在于:所述插臂数量为2,对称分布在横梁左右两侧挡臂的内侧,所述挡臂数量为2,对称分布在横梁左右两侧插臂的外侧。4.根据权利要求2所述的泊车机器人插臂和挡臂限位装置,其特征在于:所述限位以及防撞保护采用螺丝固定安装于机器人横梁上。
技术总结
本实用新型属于侧叉泊车机器人领域,尤其涉及一种泊车机器人挡臂限位装置。提供了一种泊车机器人插臂和挡臂限位装置,包括安装有插臂和挡臂的机器人横梁100,横梁左侧安装了左侧挡臂限位10和左侧插臂限位20以及左侧插臂挡臂防撞保护30,横梁右侧有右侧挡臂限位11和右侧插臂限位21以及右侧插臂挡臂防撞保护31。限位使用接近开关,侧插臂挡臂防撞保护使用槽型光电。限位以及防撞保护通过电源线与工控机相连接,工控机根据电信号监测挡臂和插臂的位移是否在设定范围内,并对挡臂和插臂的运动采取相应的控制以及重新定位。可以限制挡臂和插臂的过度位移,防止挡臂和插臂发生碰撞并且便于工控机对插臂和挡臂的运动进行控制和监测以及重新定位。以及重新定位。以及重新定位。
技术研发人员:贾宝华
受保护的技术使用者:江苏小白兔智造科技有限公司
技术研发日:2021.06.03
技术公布日:2022/2/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1