自动化凿除装置及其施工方法与流程
1.本发明涉及建筑施工的技术领域,具体涉及自动化凿除装置及其施工方法。
背景技术:
2.在高层建筑施工中,剪力墙、柱等混凝土竖向结构是建筑主体施工的关键。由于施工工艺、材料、操作人员技术熟练程度等原因,剪力墙、柱等混凝土竖向结构经常出现凸出这一质量通病。
3.就其质量缺陷产生的原因分析,除了材料和人的因素外,主要原因是现有技术中在施工完楼面混凝土后再通过安装建筑夹板支模浇注剪力墙、柱等混凝土竖向结构,由于支模在浇注时,容易出现支模移动,这样就导致浇注剪力墙、柱等混凝土竖向结构表面出现凹凸块。为了解决以上技术问题,通过人工使用电钻对混凝土竖向结构表面的凸块凿掉,然后,又人工将其进行清扫,这样,增加了工期,影响了工程的耐久性和进度。
技术实现要素:
4.针对现有技术存在的上述不足,本发明的目的在于提供一种对混凝土竖向结构表面的凹凸块进行打磨以及清扫的自动化凿除装置及其施工方法。
5.解决上述技术问题,本发明采用如下技术方案:自动化凿除装置及其施工方法,包括呈长条状的支撑架以及设置在支撑架上的移动架,所述支撑架上设有驱动移动架沿其长度方向移动的第一驱动机构,所述移动架内设有与支撑架相垂直的滑动架,所述移动架上设有用于检测混凝土表面凸块的红外测距传感器,所述移动架上设有用于容纳滑动架的凹槽,所述移动架上设有驱动滑动架沿其高度方向移动的第二驱动机构,所述滑动架上设有沿其长度方向移动的打磨机构,所述滑动架上设有驱动打磨机构沿其长度方向移动的第三驱动机构,所述打磨机构包括用于凿除混凝土的电钻,电钻垂直于滑动架,还包括微处理器,所述微处理器分别与第一驱动机构、第二驱动机构、第三驱动机构、电钻以及红外测距传感器电连接;使用时,启动电钻,微处理器下发指令至第一驱动机构,所述第一驱动机构驱动移动架沿支撑架长度方向运行,当红外测距传感器检查到混凝土表面凸块时,红外测距传感器反馈至微处理器,微处理器下发指令至第一驱动机构,停止运行,并下发指令至第三驱动机构,通过第三驱动机构带动电钻沿滑动架长度方向移动,再下发指令至第二驱动机构,所述第二驱动机构带动滑动架沿高度方向向下运动,带动电钻对混凝土表面凸块进行凿除,直到电钻的端部与红外测距传感器持平,停止运动。
6.本方案在实施时,先将支撑架安装在浇注剪力墙、柱等混凝土竖向结构侧面,安装时,保证红外测距传感器与混凝土竖向结构表面相持平,而在启动前,保证滑动架位于红外测距传感器上方;安装完毕后,通过微处理器下发指令至至第一驱动机构,第一驱动机构接收到指令后,驱动移动架沿支撑架长度方向运行,同时,红外测距传感器也随着移动架沿支撑架长
度方向运行;当红外测距传感器检查到混凝土竖向表面出现凸块时,红外测距传感器将距离数据反馈至微处理器,微处理器下发指令至第一驱动机构,停止运行,并下发指令至第三驱动机构,通过第三驱动机构带动电钻沿滑动架长度方向移动到指定位置;最后,下发指令至第二驱动机构,第二驱动机构带动滑动架沿高度方向向下移动,带动电钻也向下移动;当电钻与混凝土表面凸块相接触时,对凸块进行凿除,而电钻会沿滑动架将该区域的凸块完全凿除,整个施工工程智能化,加快整体施工周期。
7.进一步,所述打磨机构还包括用于储存水的浇注箱,所述浇注箱底部设有用于冲洗灰渣的冲洗管,所述冲洗管内还设有阀门,所述阀门与微处理器电连接。
8.进一步,所述第一驱动机构包括设置在支撑架中部的丝杆以及与丝杆连接的电机,所述丝杆上螺纹连接有螺母,所述螺母与移动架固定连接。
9.这样设计,通过电机带动丝杆转动,丝杆与螺母的螺纹连接配合,实现螺母沿丝杆长度方向移动,由于螺母与移动架固定连接,因此,实现移动架沿丝杆长度方向移动。
10.进一步,所述第二驱动机构包括设置在移动架底部的第一气缸,所述第一气缸上设有穿过移动架的第一伸缩杆,第一伸缩杆的端部设有连接杆,所述连接杆与滑动架固定连接。
11.这样设计,通过第一气缸的第一伸缩杆带动连接杆沿高度方向运动,同时也带动滑动架上下运动;当未使用时,通过第一伸缩杆带动滑动架位于红外测距传感器的上方,这样能够保证移动架沿支撑架长度方向移动时,其滑动架与混凝土表面凸块相错开;当使用时,通过第一气缸控制第一伸缩杆向下降,保证滑动架位于移动架凹槽内,同时,保证打磨机构与红外测距传感器持平,使得打磨机构能够沿红外线检测的线路进行凿除混凝土表面的凸块。
12.进一步,所述第三驱动机构包括设置在滑动架上的第二气缸,所述第二气缸上设有位于滑动架中部的第二伸缩杆,所述第二伸缩杆与打磨机构连接。
13.这样设计,通过第二气缸的第二伸缩杆带动打磨机构沿滑动架长度方向移动,保证打磨机构的电钻能够沿竖向区域进行凿除,结构简单。
14.自动化凿除装置的施工方法,包括以下步骤:步骤一:将凿除抹平装置内呈长条状的支撑架横向固定在混凝土竖向结构顶部,且混凝土竖向结构表面上划分有多个竖向区域,启动电钻,同时,启动支撑架上的第一驱动机构,通过第一驱动机构带动设置在支撑架上的移动架沿其长度方向移动,使得移动架移动覆盖所有竖向区域;步骤二:当移动架上的红外测距传感器随移动架移动,并对所有竖向区域的混凝土表面凸块进行检测,当检查到混凝土表面凸块时,红外测距传感器反馈至微处理器,微处理器下发指令至第一驱动机构,使得移动架停止运行;步骤三:当步骤二中的移动架停止运行的同时,通过微处理器下发指令至设置在滑动架上的第三驱动机构,第三驱动机构驱动打磨机构沿滑动架长度方向行走,带动打磨机构上的电钻沿滑动架长度方向移动到混凝土表面凸块上方后停止运行;步骤四:微处理器再下发指令至设置在移动架上的第二驱动机构,所述第二驱动机构带动设置在移动架内的滑动架沿其高度方向向下运动,其电钻向下运动对混凝土表面
凸块进行凿除,滑动架移动至移动架的凹槽内,当设置在滑动架上的打磨机构与红外测距传感器持平后,第二驱动机构停止运行。
15.相比现有技术,本发明具有如下优点:相比现有人工进行凿除,本发明更加智能化以及自动化,首先,将支撑架长度方向安装在支模浇注剪力墙、柱等混凝土竖向结构的长度方向,且将支撑架与滑动架之间的高度数据录入微处理器内,利用通过微处理器下发指令至第一驱动机构,第一驱动机构带动移动架沿支撑架长度方向运动,实现移动架对支模浇注剪力墙、柱等混凝土竖向结构的长度方向运动,通过红外测距传感器对混凝土竖向结构表面(即垂直面)进行检测,利用红外测距传感器的红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。
16.当红外测距传感器的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到微处理器,微处理器即可利用红外的返回信号来识别周围环境的变化,微处理器再下发指令至第一驱动机构,停止移动架移动,微处理器再下发指令至第三驱动机构,第三驱动机构驱动打磨机构上的电钻沿滑动架长度方向运行,再下方指令至第二驱动机构,通过第二驱动机构带动滑动架整体向下移动至移动架凹槽内,移动的过程中,电钻对该区域的凸块进行凿除,整个过程不需要人为控制,自动化控制操作,省时省力。
附图说明
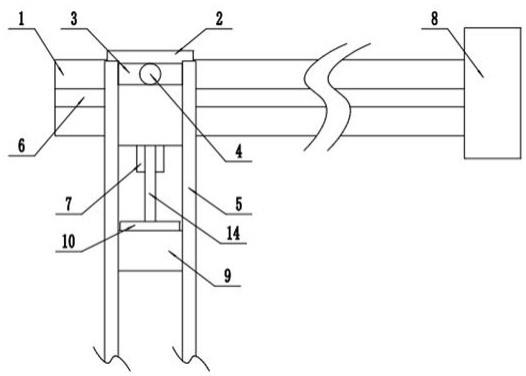
17.图1为本发明自动化凿除装置的俯视图;图2为本发明自动化凿除装置的左视图。
18.图中:支撑架1、移动架2、连接杆3、第一伸缩杆4、滑杆5、丝杆6、红外测距传感器7、电机8、电钻9、浇注箱10、第二气缸11、冲洗管12、第一气缸13、第二伸缩杆14。
具体实施方式
19.下面将结合附图及实施例对本发明作其中说明。
20.本实施例:参见图1-图2,自动化凿除装置及其施工方法,包括呈长条状的支撑架1以及设置在支撑架1上的移动架2,支撑架1上设有驱动移动架2沿其长度方向移动的第一驱动机构,移动架2内设有与支撑架1相垂直的滑动架,移动架2上设有用于检测混凝土表面凸块的红外测距传感器7,移动架2上设有用于容纳滑动架的凹槽,移动架2上设有驱动滑动架沿其高度方向移动的第二驱动机构,滑动架上设有沿其长度方向移动的打磨机构,滑动架上设有驱动打磨机构沿其长度方向移动的第三驱动机构,打磨机构包括用于凿除混凝土的电钻9,电钻9垂直于滑动架,还包括微处理器,微处理器分别与第一驱动机构、第二驱动机构、第三驱动机构、电钻9以及红外测距传感器7电连接;使用时,启动电钻9,再通过微处理器下发指令至第一驱动机构,第一驱动机构驱动移动架2沿支撑架1长度方向运行,当红外测距传感器7检查到混凝土表面凸块时,红外测距传感器7反馈至微处理器,微处理器下发指令至第一驱动机构,停止运行,并下发指令至第三驱动机构,通过第三驱动机构带动电钻9沿滑动架长度方向移动,再下发指令至第二驱动机构,第二驱动机构带动滑动架沿高度方向向下运动,带动电钻9对混凝土表面凸块进行
凿除,直到电钻9的端部与红外测距传感器7持平,停止运动。
21.本方案在实施时,先将支撑架1安装在浇注剪力墙、柱等混凝土竖向结构侧面,安装时,保证红外测距传感器7与混凝土竖向结构表面相持平,而在启动前,保证滑动架位于红外测距传感器7上方;安装完毕后,通过微处理器下发指令至至第一驱动机构,第一驱动机构接收到指令后,驱动移动架2沿支撑架1长度方向运行,同时,红外测距传感器7也随着移动架2沿支撑架1长度方向运行;当红外测距传感器7检查到混凝土竖向表面出现凸块时,红外测距传感器7将距离数据反馈至微处理器,微处理器下发指令至第一驱动机构,停止运行;并下发指令至第三驱动机构,通过第三驱动机构带动电钻9沿滑动架长度方向移动到指定位置;最后,下发指令至第二驱动机构,第二驱动机构带动滑动架沿高度方向向下移动,带动电钻11也向下移动;当电钻9与混凝土表面凸块相接触时,对凸块进行凿除,而电钻9会沿滑动架将该区域的凸块完全凿除,整个施工工程智能化,加快整体施工周期。
22.作为优选,打磨机构还包括用于储存水的浇注箱10,浇注箱10底部设有用于冲洗灰渣的冲洗管12,冲洗管12内还设有阀门,阀门与微处理器电连接。
23.本方案使用时,通过微处理器控制启闭阀门,当电钻凿除完毕后,微处理器下发指令开启阀门,使得浇注箱10内的水经冲洗管12喷射再凿除位置,进行清扫。
24.作为优选,第一驱动机构包括设置在支撑架1中部的丝杆6以及与丝杆6连接的电机8,丝杆6上螺纹连接有螺母,螺母与移动架2固定连接。
25.这样设计,通过电机8带动丝杆6转动,丝杆6与螺母的螺纹连接配合,实现螺母沿丝杆6长度方向移动,由于螺母与移动架2固定连接,因此,实现移动架2沿丝杆6长度方向移动。
26.作为优选,第二驱动机构包括设置在移动架2底部的第一气缸13,第一气缸13上设有穿过移动架2的第一伸缩杆4,第一伸缩杆4的端部设有连接杆3,连接杆3与滑动架固定连接。
27.这样设计,通过第一气缸13的第一伸缩杆4带动连接杆3沿高度方向运动,同时也带动滑动架上下运动;当未使用时,通过第一伸缩杆4带动滑动架位于红外测距传感器7的上方,这样能够保证移动架2沿支撑架1长度方向移动时,其滑动架与混凝土表面凸块相错开;当使用时,通过第一气缸13控制第一伸缩杆4向下降,保证滑动架位于移动架2凹槽内,同时,保证打磨机构与红外测距传感器7持平,使得打磨机构能够沿红外线检测的线路进行凿除混凝土表面的凸块。
28.作为优选,第三驱动机构包括设置在滑动架上的第二气缸11,第二气缸11上设有位于滑动架中部的第二伸缩杆14,第二伸缩杆14与打磨机构连接。
29.这样设计,通过第二气缸11的第二伸缩杆14带动打磨机构沿滑动架长度方向移动,保证打磨机构的电钻9能够沿竖向区域进行凿除,结构简单。
30.自动化凿除装置的施工方法,包括以下步骤:步骤一:将凿除抹平装置内呈长条状的支撑架1横向固定在混凝土竖向结构顶部,且混凝土竖向结构表面上划分有多个竖向区域,启动电钻9,同时,启动支撑架1上的第一驱动机构,通过第一驱动机构带动设置在支撑架1上的移动架2沿其长度方向移动,使得移动
架2移动覆盖所有竖向区域;步骤二:当移动架2上的红外测距传感器7随移动架2移动,并对所有竖向区域的混凝土表面凸块进行检测,当检查到混凝土表面凸块时,红外测距传感器7反馈至微处理器,微处理器下发指令至第一驱动机构,使得移动架2停止运行;步骤三:当步骤二中的移动架2停止运行的同时,通过微处理器下发指令至设置在滑动架上的第三驱动机构,第三驱动机构驱动打磨机构沿滑动架长度方向行走,带动打磨机构上的电钻9沿滑动架长度方向移动到混凝土表面凸块上方后停止运行;步骤四:微处理器再下发指令至设置在移动架上的第二驱动机构,所述第二驱动机构带动设置在移动架2内的滑动架沿其高度方向向下运动,其电钻9向下运动对混凝土表面凸块进行凿除,滑动架移动至移动架2的凹槽内,当设置在滑动架上的打磨机构与红外测距传感器7持平后,第二驱动机构停止运行。
31.相比现有人工进行凿除,本发明更加智能化以及自动化,首先,将支撑架1长度方向安装在支模浇注剪力墙、柱等混凝土竖向结构的长度方向,且将支撑架1与滑动架之间的高度数据录入微处理器内,利用通过微处理器下发指令至第一驱动机构,第一驱动机构带动移动架2沿支撑架1长度方向运动,实现移动架2对支模浇注剪力墙、柱等混凝土竖向结构的长度方向运动,通过红外测距传感器7对混凝土竖向结构表面(即垂直面)进行检测,利用红外测距传感器7的红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。
32.当红外测距传感器7的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到微处理器,微处理器即可利用红外的返回信号来识别周围环境的变化,微处理器再下发指令至第一驱动机构,停止移动架2移动,微处理器再下发指令至第三驱动机构,第三驱动机构驱动打磨机构上的电钻9沿滑动架长度方向运行,再下方指令至第二驱动机构,通过第二驱动机构带动滑动架整体向下移动至移动架2凹槽内,移动的过程中,电钻9对该区域的凸块进行凿除,整个过程不需要人为控制,自动化控制操作,省时省力。
33.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1