一种金属门窗工程施工用安装机械手的制作方法
本技术涉及玻璃安装,具体是一种金属门窗工程施工用安装机械手。
背景技术:
1、门窗在安装中,往往是先将金属的门窗框架安装固定,然后在将玻璃进行安装,最后进行打胶密封,传统的门窗的玻璃安装都是人工扶持和搬运玻璃,现在常常使用机械手对玻璃搬运和扶持。
2、在金属门窗施工中使用的机械手,主要包括车体、机械臂和安装吸盘架体,但现有的施工中使用的机械手需要根据玻璃尺寸调整吸盘位置时,只能通过加装加长杆增加吸盘的数量,无法灵活的调整吸盘的位置,不利于快速适应玻璃的尺寸,影响玻璃搬运和安装的效率,为此,我们提供了金属门窗工程施工用安装机械手解决以上问题。
技术实现思路
1、一)解决的技术问题
2、本实用新型的目的就是为了弥补现有技术的不足,提供了一种金属门窗工程施工用安装机械手。
3、二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种金属门窗工程施工用安装机械手,包括车体,所述车体的顶部设置有机械臂,所述机械臂的顶部设置有安装架,所述安装架一侧面固定连接有支撑框,所述支撑框的内壁设置有第一调节机构,所述第一调节机构的一侧设置有移动柱,所述移动柱的外表面设置有第二调节机构,所述第二调节机构的一侧面设置有电动吸盘。
5、进一步的,所述第一调节机构包括电动机,所述电动机的输出端固定连接有螺纹杆,所述螺纹杆的外表面与螺纹连接有螺纹板,所述螺纹板的外表面固定连接有u型柱。
6、进一步的,所述电动机的外表面与支撑框固定连接,所述支撑框的内部与螺纹杆的外表面转动连接,所述支撑框的内壁与螺纹板外表面滑动连接,所述支撑框的外表面与u型柱的内壁滑动连接,所述u型柱的一端与移动柱固定连接。
7、进一步的,所述第二调节机构的数量有三个,三个所述第二调节机构均包括齿轮、伸缩杆和距离传感器,其中一个所述伸缩杆的外表面与支撑框固定连接,其余两个所述伸缩杆的外表面分别与两个移动柱的外表面固定连接,其中一个所述齿轮的底部与支撑框的上表面转动连接,其余两个所述齿轮的底部分别与两个移动柱的上表面转动连接。
8、进一步的,所述齿轮的外表面设置有两个齿板,其中一个所述齿板的一侧面与伸缩杆固定连接,两个齿板的一侧面均固定连接有限制块,所述限制块的一侧面固定连接有支撑柱。
9、进一步的,所述支撑柱和限制块的数量均有三组,其中一组所述支撑柱的外表面与支撑框的内壁滑动连接,其余两组所述支撑柱的外表面分别与两个移动柱的内壁滑动连接,其中一组所述限制块的外表面与支撑框的内壁滑动连接,其余两组所述限制块的外表面分别与两个移动柱的内壁滑动连接,每一组所述支撑柱的数量有两个,两个所述支撑柱的一侧面均与电动吸盘固定连接。
10、进一步的,其中一个所述距离传感器的外表面与支撑框的上表面固定连接,其余两个所述距离传感器的外表面分别与两个移动柱的上表面固定连接。
11、三)有益效果:
12、与现有技术相比,该金属门窗工程施工用安装机械手具备如下有益效果:
13、一、本实用新型通过第一调节机构调整两侧移动柱的距离,横向调整两侧电动吸盘的位置,然后在控制第二调节机构上下调整电动吸盘的位置,提高电动吸盘的灵活性,从而快速适应不同尺寸的玻璃,实现解决只能通过加装加长杆增加吸盘的数量,无法灵活的调整吸盘的位置,不利于快速适应玻璃的尺寸,影响玻璃搬运和安装效率的问题。
技术特征:
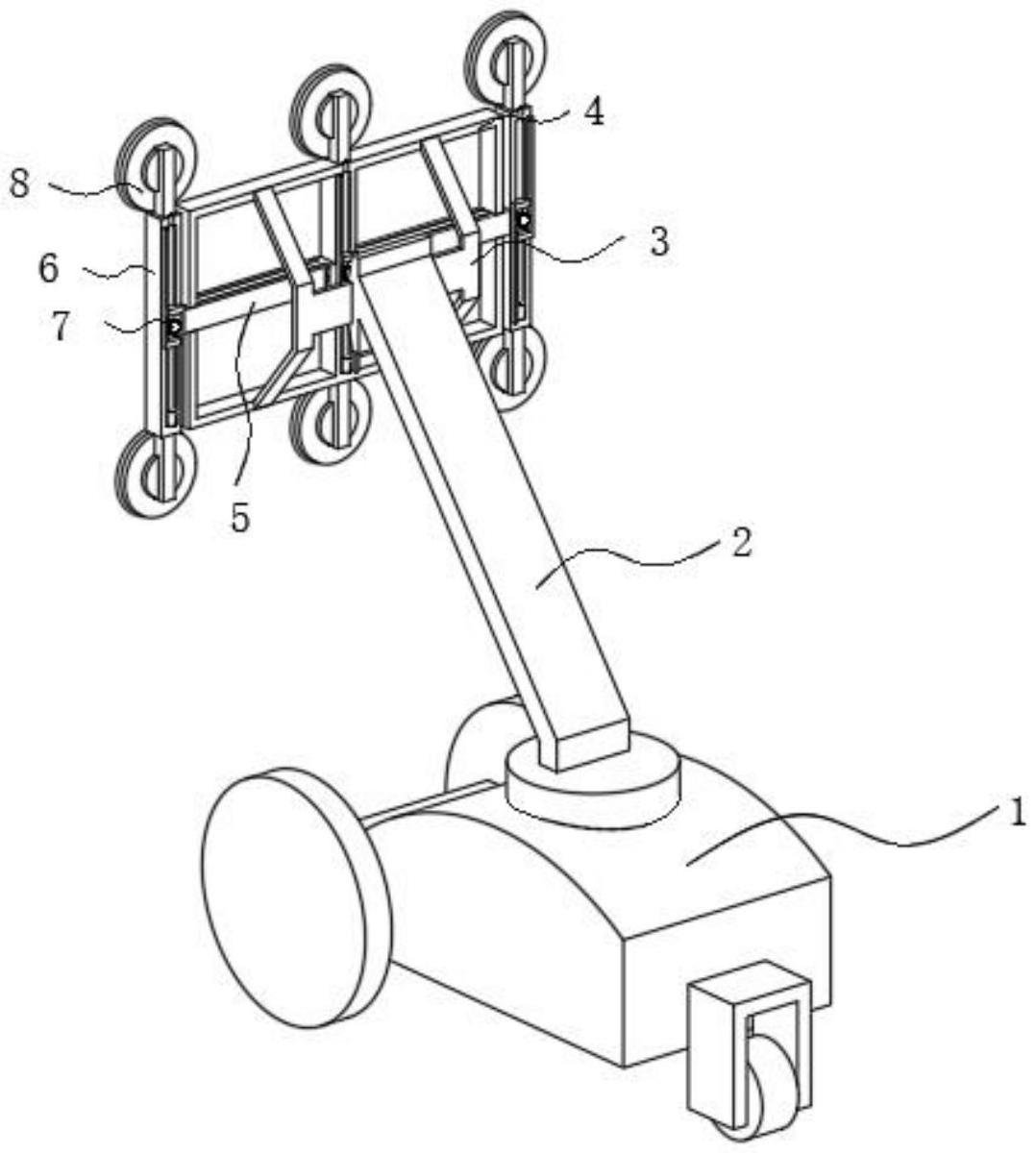
1.一种金属门窗工程施工用安装机械手,包括车体(1),所述车体(1)的顶部设置有机械臂(2),所述机械臂(2)的顶部设置有安装架(3),其特征在于:所述安装架(3)一侧面固定连接有支撑框(4),所述支撑框(4)的内壁设置有第一调节机构(5),所述第一调节机构(5)的一侧设置有移动柱(6),所述移动柱(6)的外表面设置有第二调节机构(7),所述第二调节机构(7)的一侧面设置有电动吸盘(8)。
2.根据权利要求1所述的一种金属门窗工程施工用安装机械手,其特征在于:所述第一调节机构(5)包括电动机(501),所述电动机(501)的输出端固定连接有螺纹杆(503),所述螺纹杆(503)的外表面与螺纹连接有螺纹板(504),所述螺纹板(504)的外表面固定连接有u型柱(502)。
3.根据权利要求2所述的一种金属门窗工程施工用安装机械手,其特征在于:所述电动机(501)的外表面与支撑框(4)固定连接,所述支撑框(4)的内部与螺纹杆(503)的外表面转动连接,所述支撑框(4)的内壁与螺纹板(504)外表面滑动连接,所述支撑框(4)的外表面与u型柱(502)的内壁滑动连接,所述u型柱(502)的一端与移动柱(6)固定连接。
4.根据权利要求3所述的一种金属门窗工程施工用安装机械手,其特征在于:所述第二调节机构(7)的数量有三个,三个所述第二调节机构(7)均包括齿轮(701)、伸缩杆(705)和距离传感器(706),其中一个所述伸缩杆(705)的外表面与支撑框(4)固定连接,其余两个所述伸缩杆(705)的外表面分别与两个移动柱(6)的外表面固定连接,其中一个所述齿轮(701)的底部与支撑框(4)的上表面转动连接,其余两个所述齿轮(701)的底部分别与两个移动柱(6)的上表面转动连接。
5.根据权利要求4所述的一种金属门窗工程施工用安装机械手,其特征在于:所述齿轮(701)的外表面设置有两个齿板(702),其中一个所述齿板(702)的一侧面与伸缩杆(705)固定连接,两个齿板(702)的一侧面均固定连接有限制块(703),所述限制块(703)的一侧面固定连接有支撑柱(704)。
6.根据权利要求5所述的一种金属门窗工程施工用安装机械手,其特征在于:所述支撑柱(704)和限制块(703)的数量均有三组,其中一组所述支撑柱(704)的外表面与支撑框(4)的内壁滑动连接,其余两组所述支撑柱(704)的外表面分别与两个移动柱(6)的内壁滑动连接,其中一组所述限制块(703)的外表面与支撑框(4)的内壁滑动连接,其余两组所述限制块(703)的外表面分别与两个移动柱(6)的内壁滑动连接,每一组所述支撑柱(704)的数量有两个,两个所述支撑柱(704)的一侧面均与电动吸盘(8)固定连接。
7.根据权利要求6所述的一种金属门窗工程施工用安装机械手,其特征在于:其中一个所述距离传感器(706)的外表面与支撑框(4)的上表面固定连接,其余两个所述距离传感器(706)的外表面分别与两个移动柱(6)的上表面固定连接。
技术总结
本技术公开了一种金属门窗工程施工用安装机械手,涉及玻璃安装技术领域,包括车体,所述车体的顶部设置有机械臂,所述机械臂的顶部设置有安装架,所述安装架一侧面固定连接有支撑框,所述支撑框的内壁设置有第一调节机构,所述第一调节机构的一侧设置有移动柱。本技术设计结构合理,它能够通过第一调节机构调整两侧移动柱的距离,横向调整两侧电动吸盘的位置,然后在控制第二调节机构上下调整电动吸盘的位置,提高电动吸盘的灵活性,从而快速适应不同尺寸的玻璃,实现解决只能通过加装加长杆增加吸盘的数量,无法灵活的调整吸盘的位置,不利于快速适应玻璃的尺寸,影响玻璃搬运和安装效率的问题。
技术研发人员:陆磊
受保护的技术使用者:合肥萱萱建筑安装有限公司
技术研发日:20221021
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!