机械手式AGV智能搬运器及使用方法与流程
本申请涉及立体停车设备,尤其涉及一种机械手式agv智能搬运器及使用方法。
背景技术:
1、随着人们对停车舒适度要求的不断提高,全自动立体停车库因停车方便、存取车速度快、安全性高、故障少等特点越来越被市场所采用。在全自动立体停车库中汽车搬运器是这类停车库的主要部件之一,属于最核心部件。采用什么样的搬运器结构形式直接关系全自动立体停车库的性能。目前市场上全自动立体停车库中推出的存取汽车的搬运器形式主要有车板式、梳齿式、夹轮胎式这几种形式,车板式搬运器因牵涉到要取空车板或存空车板的情况,属于存取车最慢的一种形式;梳齿式搬运器要求每层的层高比较高,空间利用率不是太经济;夹轮胎式搬运器是这些搬运器形式中最省空间的一种形式。针对现有的存取车方式,无法适应市场需求,需要考虑存取车的效率的同时,也需要兼顾整体的稳定性和使用寿命。
2、如现有技术,专利申请号为cn201510069228.0的一种ag v汽车搬运器,包括两个结构相同的小车,及连接两个所述小车的连接机构,所述小车包括架体、设置在所述架体上的行走机构、万向轮组、夹臂机构和电气控制系统,在所述小车上靠近所述行走机构的一端为所述小车的前端,靠近所述万向轮组的一端为所述小车的后端,两个所述小车的后端相对设置,还包括设在所述架体上的电池和自动充电装置,所述电池和所述自动充电装置均与所述电气控制系统连接的。该产品也没有具备侧方位的机械性导向,无法应对小车边角搁碰到墙壁或轮胎造成停机,因此一种高效存取车、使用稳定且寿命高的机械手式ag v智能搬运器亟待提出。
技术实现思路
1、为了解决上述问题,本申请提出一种机械手式agv智能搬运器及使用方法,通过增加侧导轮有效避免边角搁碰到墙壁或轮胎,同时在车库入口也具有导向作用,提高搬运器运行的稳定性。
2、本申请通过以下技术方案实现的:
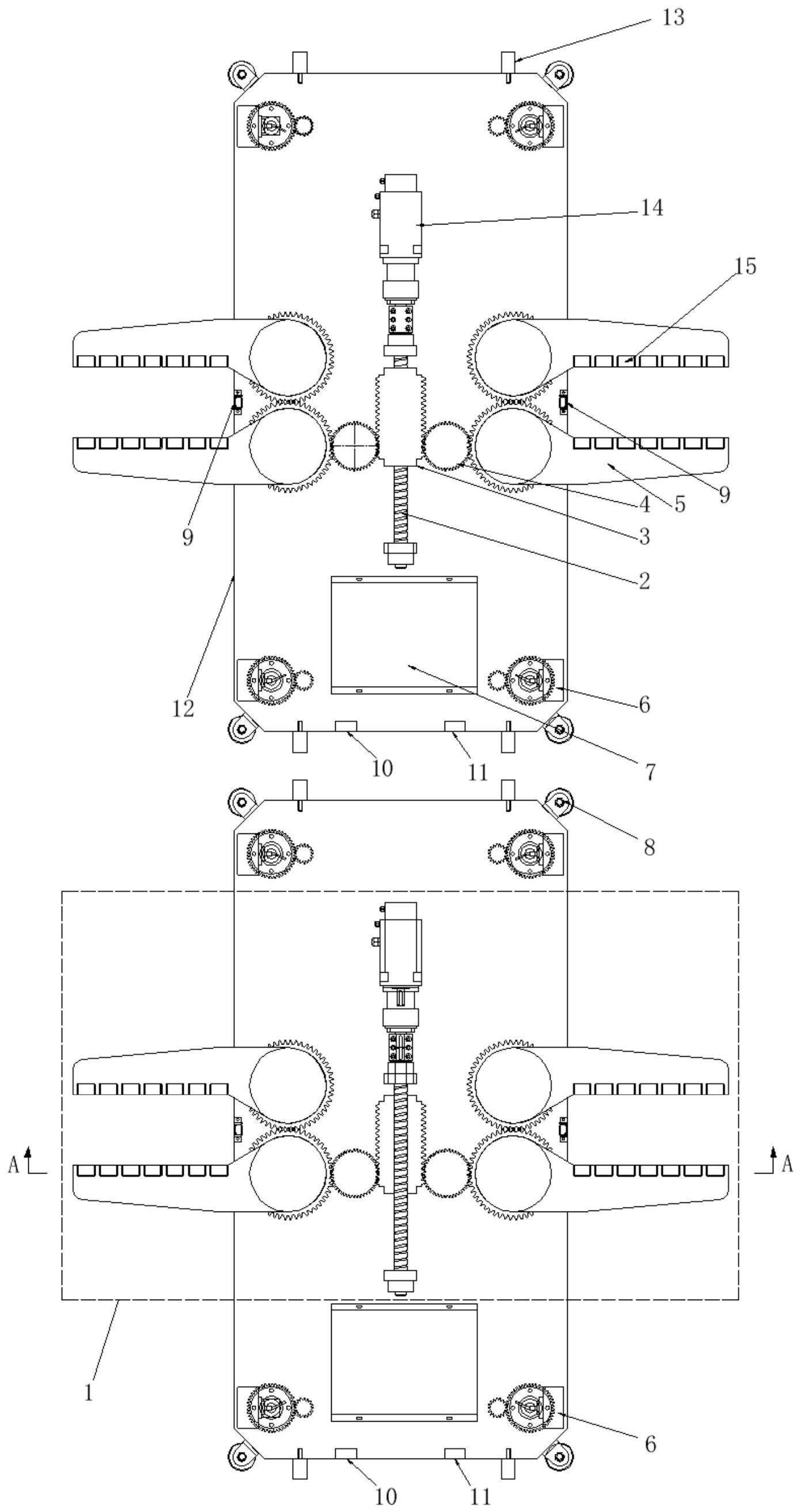
3、一种机械手式ag v智能搬运器,包括两个结构相同的小车,所述小车包括车体、夹持机构、导向行走机构、电池和电气控制系统;所述车体的中部设置夹持机构,所述夹持机构的夹持端延伸出车体的两侧,所述车体的一端与夹持机构之间设置电池;所述车体的底部均布导向行走机构;所述车体的边角端分别设有侧导轮;所述小车之间通过无线连接;所述电池分别与所述导向行走机构、所述夹持机构、所述电气控制系统电性连接;所述电气控制系统分别与所述导向行走机构、所述夹持机构电性连接。
4、进一步地,所述侧导轮安装有防撞轮胎。
5、进一步地,所述车体的后端设有测距仪。
6、进一步地,所述电池安装有无线充电器。
7、进一步地,所述导向行走机构采用舵轮。
8、进一步地,所述夹持机构包括丝杠、夹持电机和夹持臂组;所述车体的中部两侧分别设置夹持臂组,所述夹持臂组包括两个结构相同的夹持臂;所述夹持臂的一端分别与车体铰接,两夹持臂对称设置,且夹持臂的铰接端设有传动齿轮,两夹持臂之间通过传动齿轮啮合连接;所述夹持臂组之间设置丝杠,所述丝杠的两端分别通过转动件与所述车体连接;所述丝杠的一端延伸,并与夹持电机连接;所述丝杠安装有齿条;所述齿条与所述传动齿轮之间安装有过渡齿轮;所述过渡齿轮分别与所述齿条、所述传动齿轮啮合。
9、进一步地,所述车体设有轮胎检测开关,所述轮胎检测开关置于夹持臂组的中间。
10、进一步地,所述夹持臂的另一端内侧均布滚轮。
11、进一步地,所述车体的后端设有充电接受端。
12、进一步地,所述车体两端的两侧分别设有缓冲器。
13、本发明还提供了上述机械手式ag v智能搬运器的使用方法,包括以下步骤:存车时:设定ag v智能搬运器的一台小车夹取汽车的前轮,另一台小车夹取汽车的后轮;夹取后轮的小车以夹取前轮的小车来定位随行;电气控制系统接收到信号后,ag v智能搬运器移动到汽车车轮对应位置,夹取汽车车轮,抬起,搬运汽车至停车位指定位置后,夹持机构打开,ag v智能搬运器驶离汽车底盘,完成存车;取车步骤与存车相反;根据电气控制系统接入信号的情况判断ag v智能搬运器是否需要继续存车或取车,如果都不需要则ag v智能搬运器自动回到充电区进行充电。
14、本申请的有益效果:本申请增加侧导轮,有效避免小车边角处在转向时会搁置到墙边或汽车轮胎的情况,通过侧导轮小车能顺畅的拐弯,不易发生卡机和停机的现象,有效提高机械手式ag v智能搬运器运行稳定性和使用寿命;本申请的智能搬运器,小车之间采用无线连接的方式,根据主控制系统的设定,多台搬运器的小车可以根据汽车位置,重新组合连接,也可互换小车来搬运前轮或后轮,搬运效率更高。
15、此外,本申请所采用的夹持机构,采用统一的动力源驱动夹持臂组,夹持臂组通过齿轮啮合传动,精度高,联动快,而且结构更简单,更耐用,无需复杂的精度调试,节约了材料和人力成本,且维修也方便。
技术特征:
1.一种机械手式agv智能搬运器,包括两个结构相同的小车,所述小车包括车体(12)、夹持机构(1)、导向行走机构(6)、电池(7)和电气控制系统;所述车体(12)的中部设置夹持机构,所述夹持机构(1)的夹持端延伸出车体(12)的两侧,其特征在于,所述车体(12)的一端与夹持机构(1)之间设置电池;所述车体(12)的底部均布导向行走机构(6);所述车体(12)的边角端分别设有侧导轮(8);所述小车之间通过无线连接;所述电池(7)分别与所述导向行走机构(6)、所述夹持机构(1)、所述电气控制系统电性连接;所述电气控制系统分别与所述导向行走机构(6)、所述夹持机构(1)电性连接。
2.根据权利要求1所述的机械手式agv智能搬运器,其特征在于,所述车体(12)的后端设有测距仪(10)。
3.根据权利要求1所述的机械手式agv智能搬运器,其特征在于,所述电池(7)安装有无线充电器。
4.根据权利要求1所述的机械手式agv智能搬运器,其特征在于,所述导向行走机构(6)采用舵轮。
5.根据权利要求1所述的机械手式agv智能搬运器,其特征在于,所述夹持机构(1)包括丝杠(2)、夹持电机(14)和夹持臂组;所述车体(12)的中部两侧分别设置夹持臂组,所述夹持臂组包括两个结构相同的夹持臂(5);所述夹持臂(5)的一端分别与车体(12)铰接,两夹持臂(5)对称设置,且夹持臂(5)的铰接端设有传动齿轮,两夹持臂(5)之间通过传动齿轮啮合连接;所述夹持臂组之间设置丝杠(2),所述丝杠(2)的两端分别通过转动件与所述车体(12)连接;所述丝杠(2)的一端延伸,并与夹持电机(14)连接;所述丝杠(2)安装有齿条(3);所述齿条(3)与所述传动齿轮之间安装有过渡齿轮(4);所述过渡齿轮(4)分别与所述齿条(3)、所述传动齿轮啮合。
6.根据权利要求5所述的机械手式agv智能搬运器,其特征在于,所述车体(12)设有轮胎检测开关(9),所述轮胎检测开关(9)置于夹持臂组的中间。
7.根据权利要求5所述的机械手式agv智能搬运器,其特征在于,所述夹持臂(5)的另一端内侧均布滚轮(15)。
8.根据权利要求1所述的机械手式agv智能搬运器,其特征在于,所述车体(12)的后端设有充电接受端(11)。
9.根据权利要求1所述的机械手式agv智能搬运器,其特征在于,所述车体(12)两端的两侧分别设有缓冲器(13)。
10.一种机械手式agv智能搬运器的使用方法,其特征在于,包括以下步骤:
技术总结
本发明属于立体停车设备技术领域,公开了一种机械手式AGV智能搬运器及使用方法,包括两个结构相同的小车,小车包括车体、导向行走机构、夹持机构、电池和电气控制系统;车体的中部设置夹持机构,夹持机构的夹持端延伸出车体的两侧,车体的一端与夹持机构之间设置电池;车体的底部均布导向行走机构;车体的边角端分别设有侧导轮;两小车之间通过无线连接;本申请增加侧导轮,有效避免小车边角处在转向时会搁置到墙边或汽车轮胎的情况,提高搬运器运行稳定性和使用寿命;本申请的智能搬运器,两小车之间采用无线连接的方式,多台搬运器的小车可以根据汽车位置,重新组合连接,也可互换小车来搬运前轮或后轮,搬运效率更高。
技术研发人员:林伟通,胡云高,郭勇金,廖威
受保护的技术使用者:深圳市伟创自动化设备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!