一种晶棒切片机、晶棒切割系统及其上下料方法与流程
本发明涉及晶棒切割领域,特别是涉及一种晶棒切片机、晶棒切割系统及其上下料方法。
背景技术:
1、现有切片机中,进料通道和人工操作区域同时位于切割室的前侧,由于晶托从进料通道送入切割室的上料过程全程依靠机械手完成,因此很容易导致机械手和人工操作区域内的工作人员发生干涉,引发了安全隐患。
技术实现思路
1、基于此,有必要针对切片机切割效率低的问题,提供一种晶棒切片机、晶棒切割系统及其上下料方法。
2、本发明提供的技术方案为:
3、一种晶棒切片机,包括架体、切割轴和抱夹装置,所述架体内设置有切割室和进料通道,所述切割室位于所述进料通道的前侧,所述切割室的后侧侧壁上开设有进料口,所述进料通道的后端连通至所述架体外侧,所述进料通道的前端通过所述进料口连通至所述切割室,晶托经由所述进料通道进入所述切割室,所述切割轴安装于所述切割室内,所述抱夹装置用于带动晶托靠近或者远离所述切割轴。
4、本发明所述进料通道的后端敞开,以提供供机械手进行活动的避让空间。
5、本发明所述切割室的壁上还开设有至少一个出料口,所述出料口连通至所述架体外侧,晶托经由所述出料口离开所述切割室。
6、本发明所述进料口还用于供晶托和切割完的晶棒离开所述切割室。
7、本发明所述架体前侧设置有人工活动区。
8、一种晶棒切割系统,包括晶棒切片机、机械手和料区,所述机械手用于从所述料区获取晶托和待切割的晶棒送往切割室。
9、本发明所述机械手还用于从所述出料口和/或所述进料口获取晶托和切割完的晶棒送至所述料区。
10、本发明所述机械手具有预设活动范围,所述出料口位于所述预设活动范围内,进料口和/或所述进料通道后端位于所述预设活动范围内,所述料区位于运料车上,所述运料车移动至所述预设活动范围内时,所述机械手在所述料区处取放晶托。
11、本发明所述晶棒切割系统还包括滑轨,所述滑轨设置于天花板或者地面上,所述机械手滑动设置在所述滑轨上,以在所述料区和所述晶棒切片机之间移动。
12、本发明所述晶棒切片机的数量有多个,所有所述晶棒切片机分布在所述滑轨的一侧或者两侧,位于所述滑轨同一侧的所述晶棒切片机并排设置,且每个晶棒切片机的进料通道轴线垂直于所述滑轨。
13、本发明所述机械手上安装有第二推料机构,当所述机械手上获取有晶托时,所述第二推料机构沿晶托的长度方向动作。
14、本发明所述机械手包括两个相对设置的夹持臂,两个所述夹持臂配合以抱紧或者松开晶托。
15、本发明所述料区相对晶棒切片机活动设置或者固定设置。
16、一种晶棒切片机的上料方法,包括如下步骤:
17、机械手获取晶托并移动至进料通道或进料口;
18、控制所述晶托的重心到达切割室内;
19、将晶托完全推入所述切割室内;
20、控制晶托与所述机械手分离;
21、或者,
22、机械手获取晶托并移动至进料通道或进料口;
23、所述切割室内安装有拉料机构,所述拉料机构将晶托拉向切割室内。
24、本发明所述机械手上安装有第二推料机构,第二推料机构用于将晶托完全推入所述切割室内。
25、本发明将晶托完全推入所述切割室内的过程如下:所述机械手上设置有顶块,当晶托与所述机械手分离后,所述顶块和所述晶托在所述晶托的长度方向上相对,以通过所述顶块将晶托完全推入切割室内,或者,当晶托与所述机械手分离后,所述机械手的一部分和所述晶托在所述晶托的长度方向上相对,以通过所述机械手将晶托完全推入切割室内。
26、本发明所述机械手安装在进退装置上,所述进退装置控制所述机械手将晶托推向切割室。
27、本发明所述机械手包括两个相对设置的夹持臂,两个所述夹持臂配合以抱紧或者松开晶托,两个所述夹持臂在对晶托抱紧的状态下将晶托的重心移动至切割室内,然后两个所述夹持臂松开晶托。
28、一种晶棒切片机的下料方法,包括如下步骤:
29、机械手移动至出料口处;
30、切割室内安装有第一推料机构,所述第一推料机构将所述切割室内的晶托推向所述机械手,以使所述晶托的重心落在所述机械手上;
31、所述机械手锁固住晶托;
32、或者,
33、机械手移动至出料口处;
34、机械手将晶托的一部分拉出切割室外,以使晶托的重心向所述出料口移动;
35、机械手进入切割室内,以对晶托的重心进行支撑;
36、机械手将晶托带离切割室。
37、本发明所述机械手安装于进退装置上,机械手锁固住晶托后,进退装置控制机械手朝向远离切割室的方向移动,以将晶托从所述切割室内拉出。
38、本发明所述机械手包括两个相对设置的夹持臂,两个所述夹持臂配合以抱紧或者松开晶托,所述第一推料机构将晶托推向夹持臂的时候,所述夹持臂对晶托的一部分进行支撑。
39、本发明所述机械手位于所述出料口处时,所述机械手与所述出料口的边缘接触或者至少部分位于所述切割室内。
40、本发明的有益效果为:
41、进料通道提供了晶托和晶托上的晶棒进入切割室的通路,以使得晶托和晶棒能够从进料口进入切割室,然后再由抱夹装置在切割室内带动晶托移向切割轴,利用切割轴上的切割线对晶棒进行切割,切割完成后再由抱夹装置将晶托带离切割轴。
42、由于进料通道位于切割室后侧,故而机械手是从架体后侧进行上料,也就对架体前侧的人工活动区产生了避让,有效提升了安全性。
43、说明书附图
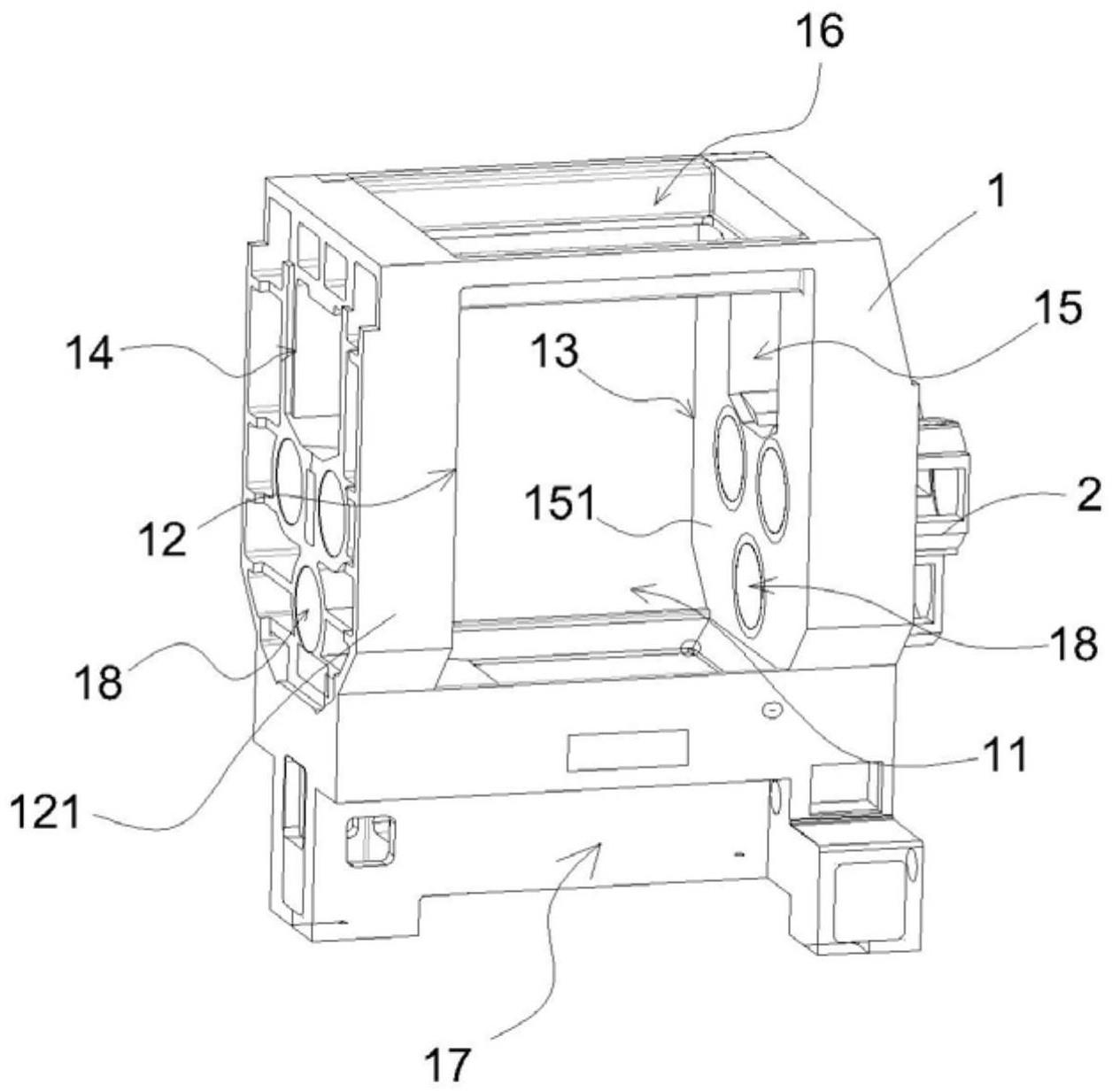
44、图1为本发明实施例1的架体的立体结构示意图一;
45、图2为本发明实施例1的架体的立体结构示意图二;
46、图3为本发明实施例1的架体的俯视结构示意图;
47、图4为本发明实施例2的晶棒切割系统的平面布局图;
48、图5为本发明实施例2中列举的其他一些实施例中机械手的结构示意图。
49、1、架体;11、切割室;12、进料口;121、第三侧壁;13、第四出料口;131、第四侧壁;14、第一出料口;141、第一侧壁;15、第二出料口;151、第二侧壁;16、第五出料口;17、收放线室;18、轴孔;2、电机安装座;a、晶棒切片机;3、料区;4、滑轨;5、升降装置;6、进退装置;7、机械手;71、第二推料机构。
技术特征:
1.一种晶棒切片机,其特征在于,包括架体(1)、切割轴和抱夹装置,所述架体(1)内设置有切割室(11)和进料通道,所述切割室(11)位于所述进料通道的前侧,所述切割室(11)的后侧侧壁上开设有进料口(12),所述进料通道的后端连通至所述架体(1)外侧,所述进料通道的前端通过所述进料口(12)连通至所述切割室(11),晶托经由所述进料通道进入所述切割室(11),所述切割轴安装于所述切割室(11)内,所述抱夹装置用于带动晶托靠近或者远离所述切割轴。
2.根据权利要求1所述的晶棒切片机,其特征在于,所述进料通道的后端敞开,以提供供机械手进行活动的避让空间。
3.根据权利要求1所述的晶棒切片机,其特征在于,所述切割室(11)的壁上还开设有至少一个出料口,所述出料口连通至所述架体(1)外侧,晶托经由所述出料口离开所述切割室(11)。
4.根据权利要求1所述的晶棒切片机,其特征在于,所述进料口(12)还用于供晶托和切割完的晶棒离开所述切割室(11)。
5.根据权利要求1所述的晶棒切片机,其特征在于,所述架体(1)前侧设置有人工活动区。
6.一种晶棒切割系统,其特征在于,包括如权利要求1-5任一权利要求所述的晶棒切片机、机械手和料区,所述机械手用于从所述料区获取晶托和待切割的晶棒送往切割室(11)。
7.根据权利要求6所述的晶棒切割系统,其特征在于,所述机械手还用于从所述出料口和/或所述进料口(12)获取晶托和切割完的晶棒送至所述料区。
8.根据权利要求7所述的晶棒切割系统,其特征在于,所述机械手具有预设活动范围,所述出料口位于所述预设活动范围内,进料口(12)和/或所述进料通道后端位于所述预设活动范围内。
9.根据权利要求8所述的晶棒切割系统,其特征在于,所述料区位于运料车上,所述运料车移动至所述预设活动范围内时,所述机械手在所述料区处取放晶托。
10.根据权利要求7所述的晶棒切割系统,其特征在于,所述晶棒切割系统还包括滑轨,所述滑轨设置于天花板或者地面上,所述机械手滑动设置在所述滑轨上,以在所述料区和所述晶棒切片机之间移动。
11.根据权利要求10所述的晶棒切割系统,其特征在于,所述晶棒切片机的数量有多个,所有所述晶棒切片机分布在所述滑轨的一侧或者两侧,位于所述滑轨同一侧的所述晶棒切片机并排设置,且每个晶棒切片机的进料通道轴线垂直于所述滑轨。
12.根据权利要求6所述的晶棒切割系统,其特征在于,所述机械手上安装有第二推料机构,当所述机械手上获取有晶托时,所述第二推料机构沿晶托的长度方向动作。
13.根据权利要求6所述的晶棒切割系统,其特征在于,所述机械手包括两个相对设置的夹持臂,两个所述夹持臂配合以抱紧或者松开晶托。
14.根据权利要求6所述的晶棒切割系统,其特征在于,所述料区相对晶棒切片机活动设置或者固定设置。
15.一种晶棒切片机的上料方法,其特征在于,包括如下步骤:
16.根据权利要求15所述的晶棒切片机的上料方法,其特征在于,所述机械手上安装有第二推料机构,第二推料机构用于将晶托完全推入所述切割室(11)内。
17.根据权利要求15所述的晶棒切片机的上料方法,其特征在于,将晶托完全推入所述切割室(11)内的过程如下:所述机械手上设置有顶块,当晶托与所述机械手分离后,所述顶块和所述晶托在所述晶托的长度方向上相对,以通过所述顶块将晶托完全推入切割室(11)内,或者,当晶托与所述机械手分离后,所述机械手的一部分和所述晶托在所述晶托的长度方向上相对,以通过所述机械手将晶托完全推入切割室(11)内。
18.根据权利要求17所述的晶棒切片机的上料方法,其特征在于,所述机械手安装在进退装置上,所述进退装置控制所述机械手将晶托推向切割室(11)。
19.根据权利要求15所述的晶棒切片机的上料方法,其特征在于,所述机械手包括两个相对设置的夹持臂,两个所述夹持臂配合以抱紧或者松开晶托,两个所述夹持臂在对晶托抱紧的状态下将晶托的重心移动至切割室(11)内,然后两个所述夹持臂松开晶托。
20.一种晶棒切片机的下料方法,其特征在于,包括如下步骤:
21.根据权利要求20所述的晶棒切片机的下料方法,其特征在于,所述机械手安装于进退装置上,机械手锁固住晶托后,进退装置控制机械手朝向远离切割室(11)的方向移动,以将晶托从所述切割室(11)内拉出。
22.根据权利要求21所述的晶棒切片机的下料方法,其特征在于,所述机械手包括两个相对设置的夹持臂,两个所述夹持臂配合以抱紧或者松开晶托,所述第一推料机构将晶托推向夹持臂的时候,所述夹持臂对晶托的一部分进行支撑。
23.根据权利要求20所述的晶棒切片机的下料方法,其特征在于,所述机械手位于所述出料口处时,所述机械手与所述出料口的边缘接触或者至少部分位于所述切割室(11)内。
技术总结
本发明涉及一种晶棒切片机、晶棒切割系统及其上下料方法,包括架体、切割轴和抱夹装置,所述架体内设置有切割室和进料通道,所述切割室位于所述进料通道的前侧,所述切割室的后侧侧壁上开设有进料口,所述进料通道的后端连通至所述架体外侧,所述进料通道的前端通过所述进料口连通至所述切割室,晶托经由所述进料通道进入所述切割室,所述切割轴安装于所述切割室内,所述抱夹装置用于带动晶托靠近或者远离所述切割轴。
技术研发人员:曹建伟,朱亮,卢嘉彬,王金荣,周锋,傅林坚,马立江,程远瑶
受保护的技术使用者:浙江晶盛机电股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!