一种混凝土地面抹平机器人的制作方法
本发明属于建筑施工,特别是涉及一种混凝土地面抹平机器人。
背景技术:
1、传统的,当建筑物建成之后,都会在地面使用混凝土浆料进行覆盖并抹平,以使地面美观同时使用方便。目前,大多数场合仍旧依靠人工操作手扶式抹光机、驾驶式地面抹光机等进行地面抹平工作。
2、手动抹平作业的劳动强度大、工作效率很低,地面平整程度主要依靠工人经验和感觉,平整度、压合度和光洁度均难以保证,地面抹平效果差,直接影响建筑物的整体成型质量。
3、经检索公告号(cn110984545b)一种抹平装置及抹平机器人,包括:抹盘机构,抹盘机构包括抹盘架及可拆卸设置于抹盘架上的抹盘本体,抹盘本体用于对混凝土地面进行旋转抹平作业。抹盘本体高速旋转,能够对混凝土地面进行快速抹平,保证混凝土地面抹平平整度与光洁度。
4、该专利在具体使用过程中存在弊端,该专利利用单个抹盘本体对混凝土地面进行抹平,在具体使用过程中,利用抹盘本体对混凝土地面进行抹平会导致抹盘下方的混凝土分散至四周,继而并不能很好地对混凝土地面进行抹平,混凝土地面平整度还有待提高。为此,我们提出了一种混凝土地面抹平机器人。
技术实现思路
1、本发明的目的在于提供一种混凝土地面抹平机器人,解决现有的抹平装置不能很好对混凝土地面进行多层次抹平以及现有抹平装置工作效率低下的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
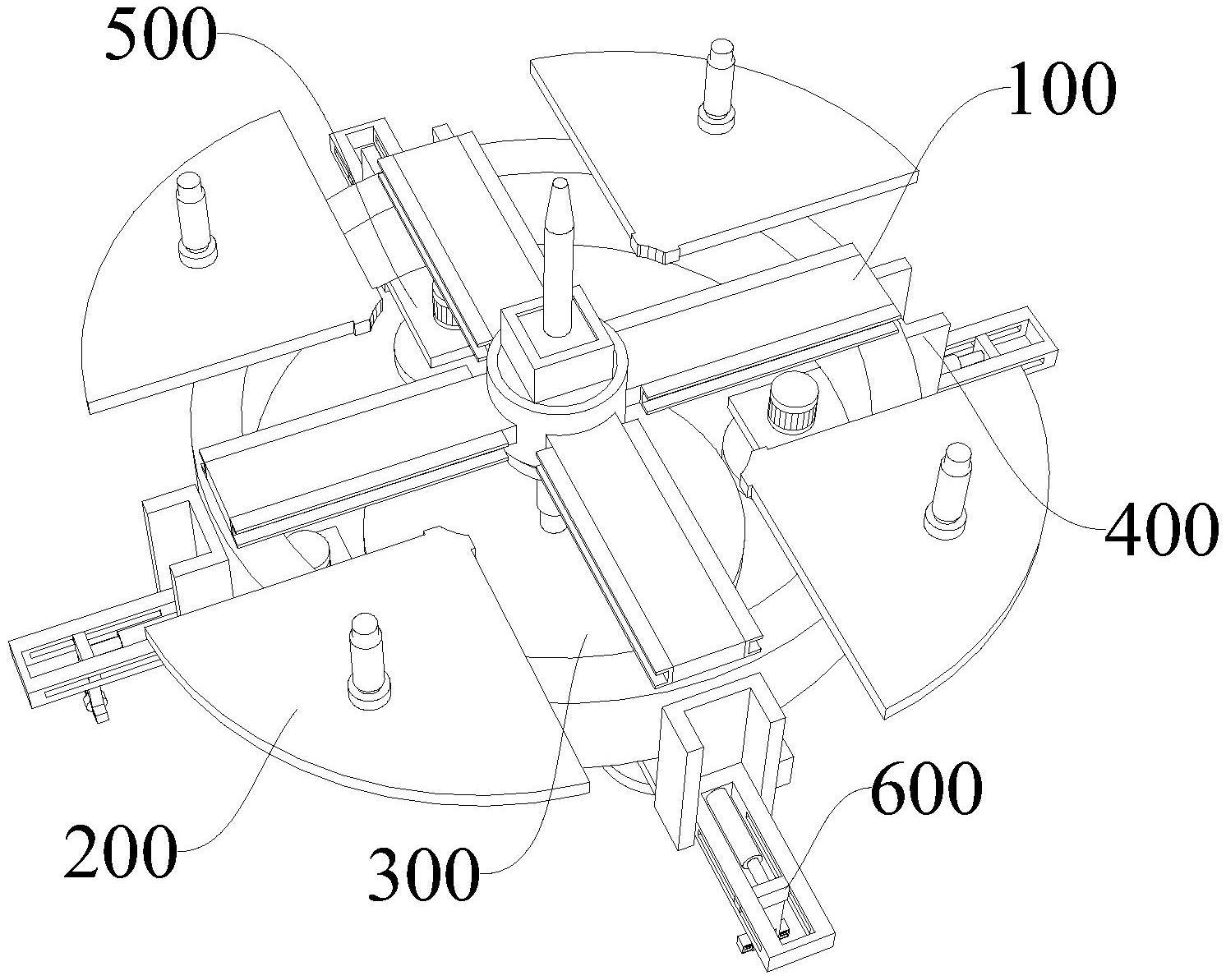
3、本发明为一种混凝土地面抹平机器人,包括外壳结构、防护结构、主抹平结构、调节结构、副抹平结构以及移动结构,所述外壳结构包括挡圈、支板以及筒座,所述支板下表面与挡圈上表面连接,所述筒座外表面与支板一侧表面连接,所述防护结构包括槽杆,所述槽杆一侧表面与支板一侧表面连接,所述主抹平结构包括第一电机,所述第一电机上表面与筒座内部上表面连接,所述调节结构包括电动滑轨以及电动滑杆,若干所述电动滑轨均安装于挡圈外表面,所述电动滑轨一侧表面设有滑槽口,所述电动滑杆一端穿过滑槽口与电动滑轨滑动配合,所述副抹平结构包括安装板以及第二电机,所述安装板一侧表面与电动滑轨一侧表面连接,所述第二电机下表面与安装板上表面连接,所述移动结构包括气缸以及推板,所述气缸一端与电动滑杆内部一侧表面连接,所述气缸一端设有缸轴,所述推板一侧表面与缸轴一端连接。
4、优选地,所述外壳结构还包括控制盒以及信号接发杆,所述控制盒下表面与筒座上表面连接,所述信号接发杆一端与控制盒上表面连接。
5、优选地,所述防护结构还包括防尘角板、柄杆以及软胶套,所述槽杆一侧表面设有方形槽口,所述防尘角板一端穿过方形槽口与槽杆滑动配合,所述柄杆一端与防尘角板上表面连接,所述软胶套安装于柄杆外表面。
6、优选地,所述主抹平结构还包括电动伸缩杆以及主抹平圆板,所述第一电机一端设有第一主轴,所述电动伸缩杆一端与第一主轴一端连接,所述主抹平圆板上表面与电动伸缩杆下表面连接。
7、优选地,所述调节结构还包括控制开关,所述控制开关一侧表面与电动滑轨一侧表面连接。
8、优选地,所述副抹平结构还包括连接轴以及副抹平圆板,所述第二电机一端设有第二主轴,所述安装板上表面设有圆口,所述第二主轴一端穿过圆口与连接轴一端连接,所述副抹平圆板上表面与连接轴下表面连接。
9、优选地,所述移动结构还包括滑块、竖杆、移动轮体以及驱动器,所述滑块一侧表面与推板一侧表面连接,所述电动滑杆一侧表面设有方形通口,所述滑块另一侧表面穿过方形通口与方形通口滑动配合,所述竖杆上表面与推板下表面连接,所述竖杆下表面设有安装口,所述移动轮体与安装口连接,所述驱动器一侧表面与竖杆一侧表面连接。
10、本发明具有以下有益效果:
11、1、本发明在抹平的过程中,中间处的混凝土抹平至四周,此时,第二电机旋转,其中,副抹平结构设有四个,分别安装于主抹平结构四周,继而便于对主抹平结构抹平分散至四周的混凝土进行进一步地抹平,抹平效果好。
12、2、本发明首先利用电动伸缩杆调节主抹平圆板的竖直高度,使得主抹平圆板下表面与混凝土地面接触,之后,第一电机带动主抹平圆板旋转,继而利用主抹平圆板对混凝土地面进行抹平,施工效率高。
13、3、本发明通过设置主抹平结构以及副抹平结构对混凝土地面进行双向抹平,抹平效果好,平整度好。
14、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种混凝土地面抹平机器人,其特征在于:包括外壳结构(100)、防护结构(200)、主抹平结构(300)、调节结构(400)、副抹平结构(500)以及移动结构(600),所述外壳结构(100)包括挡圈(110)、支板(120)以及筒座(130),所述支板(120)下表面与挡圈(110)上表面连接,所述筒座(130)外表面与支板(120)一侧表面连接,所述防护结构(200)包括槽杆(210),所述槽杆(210)一侧表面与支板(120)一侧表面连接,所述主抹平结构(300)包括第一电机(310),所述第一电机(310)上表面与筒座(130)内部上表面连接,所述调节结构(400)包括电动滑轨(410)以及电动滑杆(420),若干所述电动滑轨(410)均安装于挡圈(110)外表面,所述电动滑轨(410)一侧表面设有滑槽口,所述电动滑杆(420)一端穿过滑槽口与电动滑轨(410)滑动配合,所述副抹平结构(500)包括安装板(510)以及第二电机(520),所述安装板(510)一侧表面与电动滑轨(410)一侧表面连接,所述第二电机(520)下表面与安装板(510)上表面连接,所述移动结构(600)包括气缸(610)以及推板(620),所述气缸(610)一端与电动滑杆(420)内部一侧表面连接,所述气缸(610)一端设有缸轴,所述推板(620)一侧表面与缸轴一端连接。
2.根据权利要求1所述的一种混凝土地面抹平机器人,其特征在于:所述外壳结构(100)还包括控制盒(140)以及信号接发杆(150),所述控制盒(140)下表面与筒座(130)上表面连接,所述信号接发杆(150)一端与控制盒(140)上表面连接。
3.根据权利要求1所述的一种混凝土地面抹平机器人,其特征在于:所述防护结构(200)还包括防尘角板(220)、柄杆(230)以及软胶套(240),所述槽杆(210)一侧表面设有方形槽口,所述防尘角板(220)一端穿过方形槽口与槽杆(210)滑动配合,所述柄杆(230)一端与防尘角板(220)上表面连接,所述软胶套(240)安装于柄杆(230)外表面。
4.根据权利要求1所述的一种混凝土地面抹平机器人,其特征在于:所述主抹平结构(300)还包括电动伸缩杆(320)以及主抹平圆板(330),所述第一电机(310)一端设有第一主轴,所述电动伸缩杆(320)一端与第一主轴一端连接,所述主抹平圆板(330)上表面与电动伸缩杆(320)下表面连接。
5.根据权利要求1所述的一种混凝土地面抹平机器人,其特征在于:所述调节结构(400)还包括控制开关(430),所述控制开关(430)一侧表面与电动滑轨(410)一侧表面连接。
6.根据权利要求1所述的一种混凝土地面抹平机器人,其特征在于:所述副抹平结构(500)还包括连接轴(530)以及副抹平圆板(540),所述第二电机(520)一端设有第二主轴,所述安装板(510)上表面设有圆口,所述第二主轴一端穿过圆口与连接轴(530)一端连接,所述副抹平圆板(540)上表面与连接轴(530)下表面连接。
7.根据权利要求1所述的一种混凝土地面抹平机器人,其特征在于:所述移动结构(600)还包括滑块(630)、竖杆(640)、移动轮体(650)以及驱动器(660),所述滑块(630)一侧表面与推板(620)一侧表面连接,所述电动滑杆(420)一侧表面设有方形通口,所述滑块(630)另一侧表面穿过方形通口与方形通口滑动配合,所述竖杆(640)上表面与推板(620)下表面连接,所述竖杆(640)下表面设有安装口,所述移动轮体(650)与安装口连接,所述驱动器(660)一侧表面与竖杆(640)一侧表面连接。
技术总结
本发明公开了一种混凝土地面抹平机器人,涉及建筑施工技术领域。本发明包括外壳结构、防护结构、主抹平结构、调节结构、副抹平结构以及移动结构,外壳结构包括挡圈、支板以及筒座,支板下表面与挡圈上表面连接,筒座外表面与支板一侧表面连接,防护结构包括槽杆,槽杆一侧表面与支板一侧表面连接,主抹平结构包括第一电机。本发明通过设置主抹平结构以及副抹平结构对混凝土地面进行双向抹平,抹平效果好,平整度好,在抹平的过程中,中间处的混凝土抹平至四周,此时,第二电机旋转,其中,副抹平结构设有四个,分别安装于主抹平结构四周,继而便于对主抹平结构抹平分散至四周的混凝土进行进一步地抹平,抹平效果好。
技术研发人员:张锦禄,姬长明,焦保卫
受保护的技术使用者:陕西建工第九建设集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!