混凝土搅拌系统及方法与流程
本发明涉及混凝土搅拌运输专用车,尤其涉及一种混凝土搅拌系统及方法。
背景技术:
1、混凝土搅拌运输车是运送混凝土的专用卡车,混凝土搅拌运输车在运输过程中需一直保持旋转状态以保证混凝土不会凝固,并且基于不同转速运输混凝土也会影响混凝土的品质。因此,对搅拌车罐体的指令控制是一项重要的研究课题,既要满足使用场景的功能需求,又要满足罐体转速要求。
2、传统混凝土搅拌车的搅拌指令通常通过车内机械操纵机构实现,即通过调节液压泵的伺服手柄角度,控制搅拌罐的正反转以及转速大小,可见,一个操纵杆需要负责多种模式切换,以及多种转速调节,以至于通常出现操作失误的情况,综上,对于混凝土搅拌罐的控制方式单一且调控精准度较差。
技术实现思路
1、本发明提供了一种混凝土搅拌系统及方法,以解决控制方式单一且调控精准度较差的技术问题。
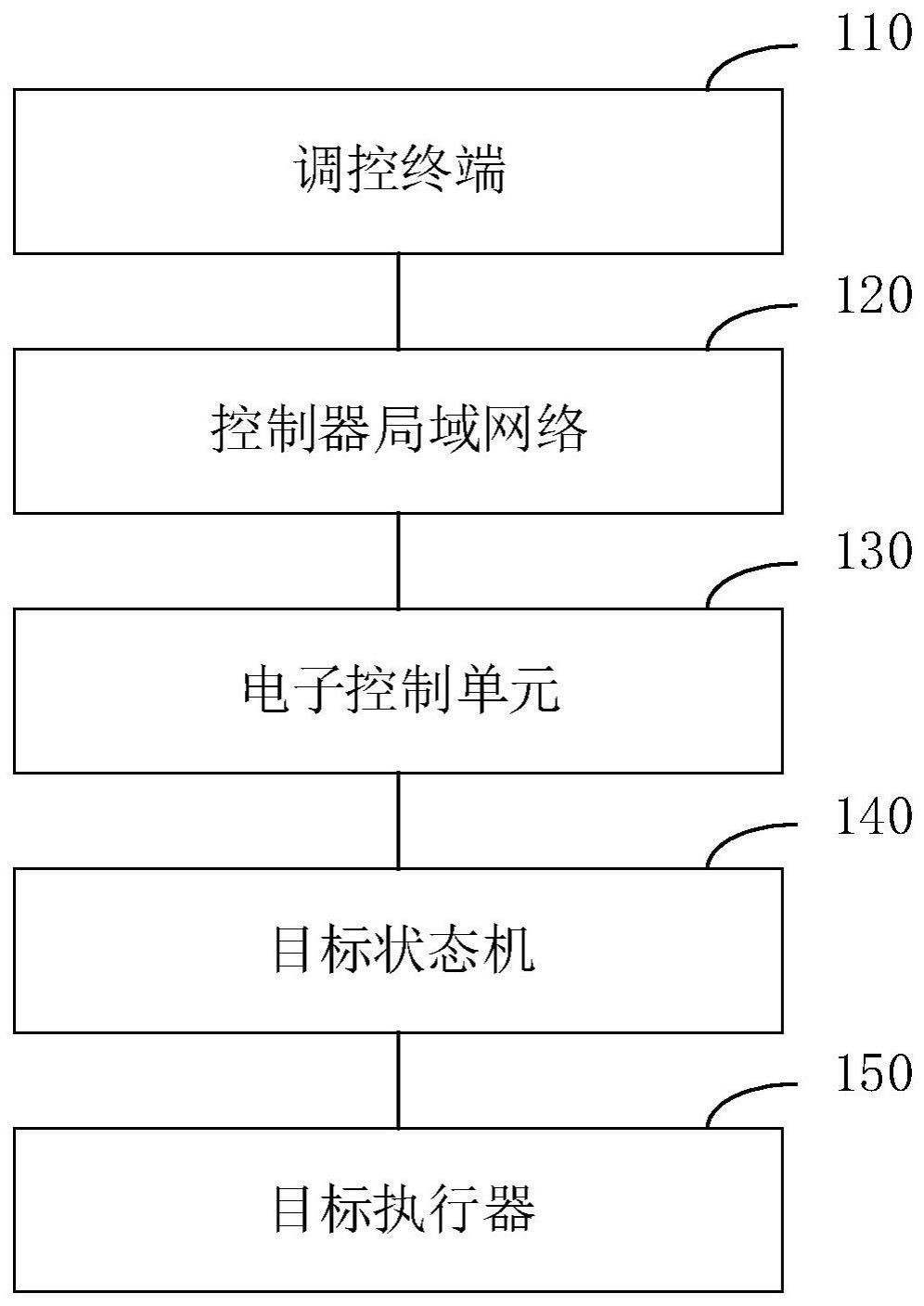
2、根据本发明的一方面,提供了一种混凝土搅拌系统,其中,该系统包括:调控终端、控制器局域网络、电子控制单元、目标状态机以及目标执行器;其中,
3、所述调控终端,用于接收针对混凝土搅拌罐的人工调控操作,并基于所述人工调控操作生成目标指令信号,通过目标报文将所述目标指令信号发送至所述控制器局域网络;
4、所述电子控制单元,用于通过所述控制器局域网络获取所述目标报文,并对所述目标报文进行解析,确定所述目标指令信号的调控类型,并基于所述调控类型,将所述目标指令信号发送至所述目标状态机;
5、所述目标状态机,用于根据所述目标指令信号确定目标工作状态,进入所述目标工作状态并生成与所述目标工作状态对应的目标执行信号,将所述目标执行信号发送至所述目标执行器;
6、所述目标执行器,用于基于所述目标执行信号控制所述混凝土搅拌罐执行目标操作。
7、根据本发明的另一方面,提供了一种混凝土搅拌方法,其中,该方法包括:
8、接收针对混凝土搅拌罐的人工调控操作,并基于所述人工调控操作生成目标指令信号,通过目标报文将所述目标指令信号发送至所述控制器局域网络;
9、通过所述控制器局域网络获取所述目标报文,并对所述目标报文进行解析,确定所述目标指令信号的调控类型,并基于所述调控类型,将所述目标指令信号发送至所述目标状态机;
10、根据所述目标指令信号确定目标工作状态,进入所述目标工作状态并生成与所述目标工作状态对应的目标执行信号,将所述目标执行信号发送至所述目标执行器;
11、基于所述目标执行信号控制所述混凝土搅拌罐执行目标操作。
12、本发明实施例的技术方案,通过所述调控终端,用于接收针对混凝土搅拌罐的人工调控操作,并基于所述人工调控操作生成目标指令信号,通过目标报文将所述目标指令信号发送至所述控制器局域网络;所述电子控制单元,用于通过所述控制器局域网络获取所述目标报文,并对所述目标报文进行解析,确定所述目标指令信号的调控类型,并基于所述调控类型,将所述目标指令信号发送至所述目标状态机;所述目标状态机,用于根据所述目标指令信号确定目标工作状态,进入所述目标工作状态并生成与所述目标工作状态对应的目标执行信号,将所述目标执行信号发送至所述目标执行器;所述目标执行器,用于基于所述目标执行信号控制所述混凝土搅拌罐执行目标操作。基于本发明的技术方案,能够提高对混凝土搅拌控制的精准性和多样性。
13、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种混凝土搅拌系统,其特征在于,包括:调控终端、控制器局域网络、电子控制单元、目标状态机以及目标执行器;其中,
2.根据权利要求1所述的系统,其特征在于,所述调控终端包括固定调控终端和/或远程移动遥控终端。
3.根据权利要求1所述的系统,其特征在于,所述电子控制单元包括报文解析模块和调控类型确定模块,其中,
4.根据权利要求3所述的系统,其特征在于,所述目标状态机包括工作模式切换状态机;其中,
5.根据权利要求4所述的系统,其特征在于,所述目标执行器包括第一执行器;其中,
6.根据权利要求5所述的系统,其特征在于,所述工作模式切换状态机,还用于在所述第一执行器完成所述第一操作后,将所述第一工作状态切换为所述第一空闲状态。
7.根据权利要求3所述的系统,其特征在于,所述目标状态机包括转速调节状态机;其中,
8.根据权利要求7所述的系统,其特征在于,所述目标执行器包括第二执行器;其中,
9.根据权利要求8所述的系统,其特征在于,所述转速调节状态机,还用于在所述第二执行器完成所述第二操作后,将所述第二工作状态切换为至所述第二空闲状态。
10.一种混凝土搅拌方法,其特征在于,包括:
技术总结
本发明公开了一种混凝土搅拌系统及方法。其中,混凝土搅拌系统包括:调控终端,用于接收针对混凝土搅拌罐的人工调控操作,基于人工调控操作生成目标指令信号,通过目标报文将目标指令信号发送至控制器局域网络;电子控制单元,用于通过控制器局域网络获取目标报文,对目标报文进行解析,确定目标指令信号的调控类型,基于调控类型,将目标指令信号发送至目标状态机;目标状态机,用于确定目标工作状态,进入目标工作状态并生成与目标工作状态对应的目标执行信号,将目标执行信号发送至目标执行器;目标执行器,用于基于目标执行信号控制混凝土搅拌罐执行目标操作。基于本发明的技术方案,能够提高对混凝土搅拌控制的精准性和多样性。
技术研发人员:郭睿,王明卿,陈铁,冯倩,张东雨
受保护的技术使用者:一汽解放汽车有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!