一种硅片吸盘吸附方法与流程
本发明涉及一种硅片吸盘吸附方法。
背景技术:
1、现有的片状的硅晶体是由硅棒切割形成的,在切割的过程中需要利用吸盘进行吸附实现硅片的转移,现有的吸盘机构一般采用三轴滑台或多自由度的机械臂驱动具有负压吸盘功能的吸盘吸附硅片,一般在切割硅片的过程中,线切割刀具对硅片有向下的压力,当线切割刀具处于最后阶段时,控制吸盘的伸缩结构对硅片接触时的预应力进而导致了硅片在切断的过程中尤其是由上至下已完成切割过半情况,待切割完成的硅片上半部分与硅棒之间形成间隙,此时因伸缩机构的推拉造成应力不均匀而破裂。
技术实现思路
1、为了解决现有吸盘式吸取硅晶片因气动或液压伸缩装置驱动吸盘应力造成硅片切割时应力不均而破裂。
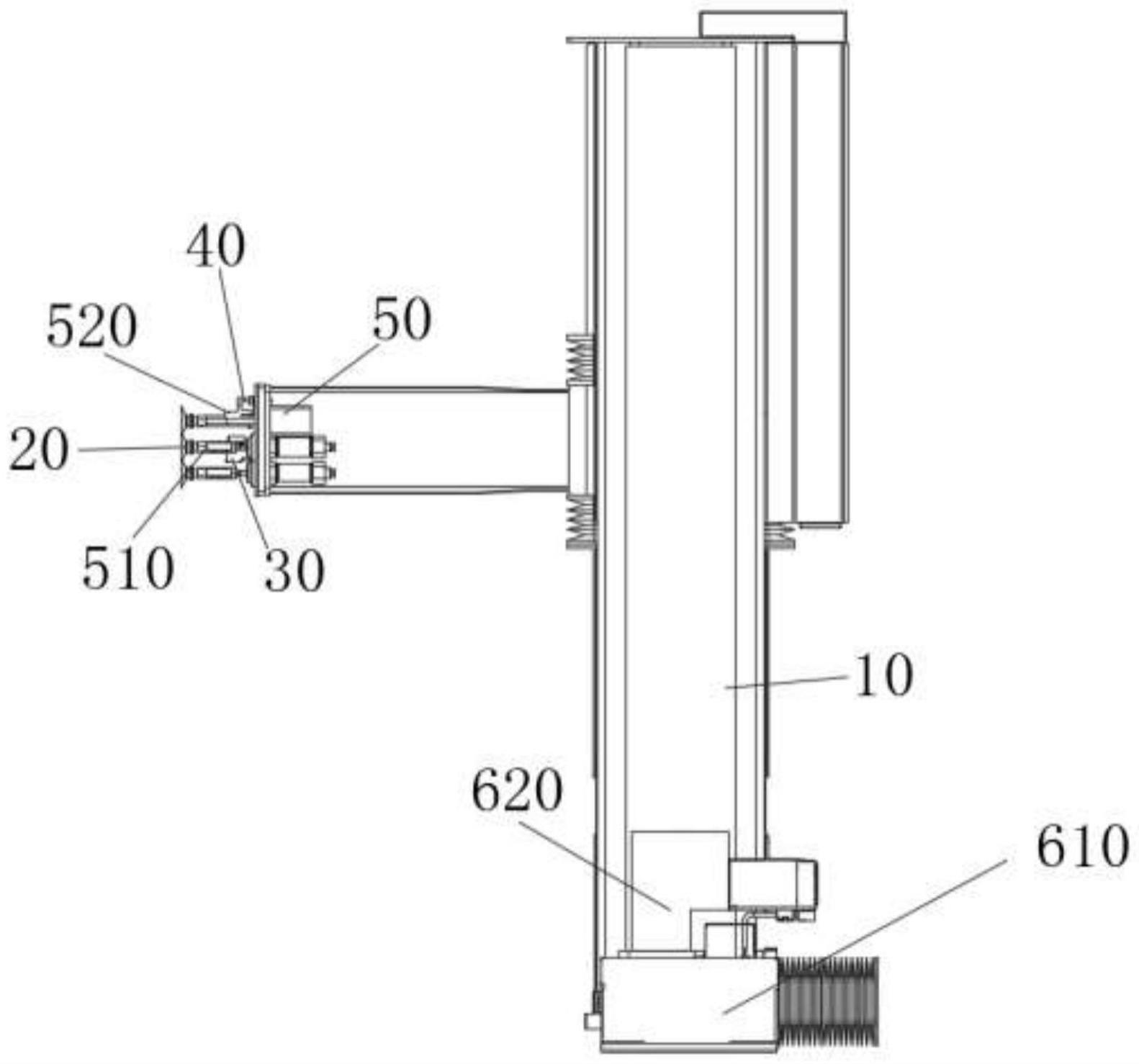
2、本发明的技术方案如下:一种硅片吸盘吸附方法,利用一吸盘组件,所述吸盘组件包括能产生负压的吸盘及驱动吸盘朝向硅片伸缩的伸缩机构;
3、具体步骤如下:
4、s1:切片之前,伸缩机构定位后驱动吸盘伸出设定长度使吸盘与硅棒接触;
5、s2:吸盘产生负压吸住晶棒表面,保持吸盘位置,吸盘保持吸力;
6、s3:伸缩机构锁止行程;
7、s4:割刀具对硅棒进行切割后硅片切割的硅片吸附在吸盘上。
8、在步骤s1完成后,步骤s3之前伸缩机构解除对硅棒表面的压力。优选的,所述吸盘组件设置在吸盘架上,所述吸盘组件设置于一移动组件上,以驱动吸盘组件靠近或远离硅棒,所述吸盘组件或吸盘架上具有感应吸盘伸缩长度的第一传感器。
9、优选的,所述伸缩机构定位包括以下步骤:
10、(1)伸缩机构驱动吸盘伸出,伸缩机构解除对吸盘的压力,移动吸盘组件使吸盘靠近接触硅棒端部;
11、(2)当吸盘遇到硅棒后,伸缩机构的伸缩端会被硅棒顶住回缩,第一传感器预警;
12、步骤s1中伸缩机构驱动吸盘伸出设定长度大于吸盘组件远离硅棒端面行程距离,并使吸盘接触硅棒表面。
13、优选的,所述吸盘架竖向设置,伸缩机横向固定于吸盘架上,所述伸缩机构的伸缩端横向设置且与吸盘固定连接。
14、优选的,所述再取片步骤中二次伸出的长度与吸盘组件远离硅棒端面行程距离之差小于吸盘的压缩余量。
15、优选的,吸盘架或吸盘组件上设置有感应吸盘与硅棒之间距离的第二传感器;具体步骤如下:第二传感器感应吸盘与硅棒之间距离到达设定距离后,移动组件减速带动吸盘组件朝向硅棒端部移动。
16、优选的,所述吸盘架上设有真空发生器,所述吸盘与真空发生器真空口连通以实现吸盘产生负压。
17、优选的,所述第一传感器为接触式传感器,所述伸缩机构的伸缩端上固定有能与其接触的滑块,伸缩机构的伸缩端会被硅棒顶住回缩,滑块接触到接触式传感器,移动组件停止移动。
18、根据权利要求2任一所述的一种硅片吸盘吸附方法,其特征在于,所述吸盘位于输送平台的上方,所述移动组件包括固定于吸盘架上的移动板,所述移动板下部固定有移动电机,所述移动电机的输出端固定有齿轮,所述的输送平台固定有与齿轮啮合的齿条。
19、优选的,所述伸缩机构为锁紧气缸,所述步骤(4)中,锁紧气缸的锁止机构工作实现锁紧气缸行程的限制,伸缩机构解除对硅棒表面的压力为锁紧气缸中泄。
20、与现有技术相比,本发明具有如下有益效果:
21、(1)所述伸缩端具有防止移动的锁紧装置;所述伸缩装置控制吸盘在接触硅棒表面后解除对硅棒表面的压力,使伸缩装置能够在锁紧行程之前具有自适应调节的能力避免对硅棒的有轴向的压力过大而破裂;伸缩机构锁紧行程后不对硅片产生额外的应力,切割过程及产品质量稳定。
22、(2)本发明利用传感器及具有伸缩装置气压的控制,实现吸盘与硅片定位后接触的过程更为精准,不会因光电传感器而导致测距错误。
技术特征:
1.一种硅片吸盘吸附方法,其特征在于,利用一吸盘组件,所述吸盘组件包括能产生负压的吸盘及驱动吸盘朝向硅片伸缩的伸缩机构;
2.根据权利要求1所述的一种硅片吸盘吸附方法,其特征在于,所述吸盘组件设置在吸盘架上,所述吸盘组件设置于一移动组件上,以驱动吸盘组件靠近或远离硅棒,所述吸盘组件或吸盘架上具有感应吸盘伸缩长度的第一传感器。
3.根据权利要求2所述的一种硅片吸盘吸附方法,其特征在于,所述伸缩机构定位包括以下步骤:
4.根据权利要求1所述的一种硅片吸盘吸附方法,其特征在于,所述吸盘架竖向设置,伸缩机横向固定于吸盘架上,所述伸缩机构的伸缩端横向设置且与吸盘固定连接。
5.根据权利要求3所述的一种硅片吸盘吸附方法,其特征在于,所述再取片步骤中二次伸出的长度与吸盘组件远离硅棒端面行程距离之差小于吸盘的压缩余量。
6.根据权利要求3所述的一种硅片吸盘吸附方法,其特征在于,吸盘架或吸盘组件上设置有感应吸盘与硅棒之间距离的第二传感器;具体步骤如下:第二传感器感应吸盘与硅棒之间距离到达设定距离后,移动组件减速带动吸盘组件朝向硅棒端部移动。
7.根据权利要求2所述的一种硅片吸盘吸附方法,其特征在于,所述吸盘架上设有真空发生器,所述吸盘与真空发生器真空口连通以实现吸盘产生负压。
8.根据权利要求4所述的一种硅片吸盘吸附方法,其特征在于,所述第一传感器为接触式传感器,所述伸缩机构的伸缩端上固定有能与其接触的滑块,伸缩机构的伸缩端会被硅棒顶住回缩,滑块接触到接触式传感器,移动组件停止移动。
9.根据权利要求2任一所述的一种硅片吸盘吸附方法,其特征在于,所述吸盘位于输送平台的上方,所述移动组件包括固定于吸盘架上的移动板,所述移动板下部固定有移动电机,所述移动电机的输出端固定有齿轮,所述的输送平台固定有与齿轮啮合的齿条。
10.根据权利要求1-5任一所述的一种硅片吸盘吸附方法,其特征在于,所述伸缩机构为锁紧气缸,所述步骤(4)中,锁紧气缸的锁止机构工作实现锁紧气缸行程的限制,伸缩机构解除对硅棒表面的压力为锁紧气缸中泄。
技术总结
本发明涉及一种硅片吸盘吸附方法,切片之前,伸缩机构定位后驱动吸盘伸出设定长度使吸盘与硅棒接触;吸盘产生负压吸住晶棒表面,保持吸盘位置,吸盘保持吸力;伸缩机构锁止行程;在伸缩机构解除硅棒表面后及锁止行程之前解除对硅棒表面的压力。伸缩端具有防止移动的锁紧装置;伸缩装置控制吸盘在接触硅棒表面后解除对硅棒表面的压力,使伸缩装置能够在锁紧行程之前具有自适应调节的能力避免对硅棒的有轴向的压力过大而破裂;伸缩机构锁紧行程后不对硅片产生额外的应力,切割过程及产品质量稳定。
技术研发人员:魏聪颖,杨华英,何德镜,郑志伟,李欣,高士雄,林周琛,范舒彬,刘铭焕,李海威,李波,薛健忠,谢丹云
受保护的技术使用者:福州天瑞线锯科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!