水下清洁设备的制作方法
本发明涉及水下机器人领域,尤其涉及一种水下清洁设备。
背景技术:
1、目前的水下机器人在各个领域的应用越来越广泛,能够协助人们在水中进行作业,包含水下清洁,水下勘探,水下观光等。
2、在实际的使用中,常规的泳池清洁机器人,从清洁的区域划分,一类是只能清洁泳池池底/池壁污染物的清洁机器人,另一类是只能清洁水面污染物的清洁机器人,因为主体功能结构所限制,目前市面上的泳池清洁机器人无法同时满足清洁池底/池壁/水面三个位置。主要原因在于泳池清洁机器人无法自主地调节自身的浮力,要么整机浮力较小直接沉入水底(类似于一辆车),要么整机浮力较大,一直浮在水面(类似于一条船)。
3、有鉴于此,确有必要提供能够在水中自主升降的水下清洁设备,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种能够在水下自主升降的水下清洁设备。
2、为实现上述目的,本发明提供了一种水下清洁设备,包括:
3、设备主体;
4、储气单元,用于存储空气,安装于设备主体中的上半部分;
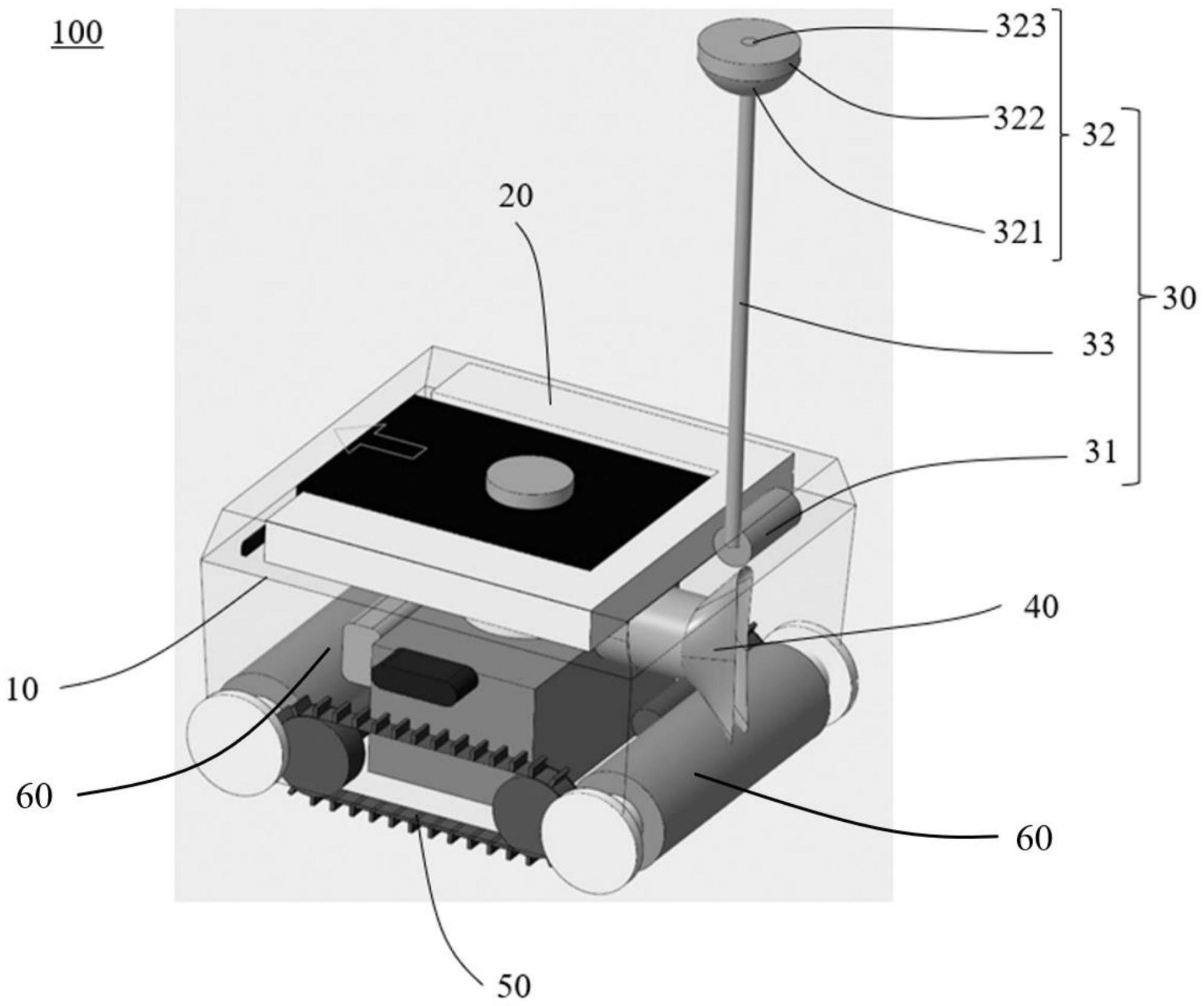
5、进气单元,包括气泵、密封阀和换气装置,所述换气装置通过通气管与所述气泵连接,所述气泵通过所述密封阀与所述换气装置连接,通过控制所述气泵工作来向所述储气单元添加或排放空气,以实现水下清洁设备在竖直方向上进行上升或下沉。
6、作为本发明进一步的改进,所述换气装置为气口浮子,所述气口浮子包括第一部分和第二部分,所述第一部分位于所述第二部分下方,所述第一部分与所述第二部分中设有贯穿的通孔,所述通孔位于所述第一部分的一端与所述通气管连接,所述通孔位于所述第二部分的一端与外部相通。
7、作为本发明进一步的改进,所述水下清洁设备还包括通信模块,所述通信模块配置为接收外部的控制信号。
8、作为本发明进一步的改进,所述储气单元采用气囊。
9、作为本发明进一步的改进,所述密封阀为单向阀或电磁阀。
10、作为本发明进一步的改进,所述气泵为柱塞泵、蠕动泵、隔膜泵、齿轮泵中的一种。
11、作为本发明进一步的改进,所述水下清洁设备还包括螺旋桨,所述螺旋桨配置为驱动所述水下清洁设备进行水平方向上的运动。
12、作为本发明进一步的改进,所述水下清洁设备还包括履带,所述履带安装于所述设备主体的底部。
13、作为本发明进一步的改进,所述水下清洁设备还包括清洁主刷,所述清洁主刷安装于所述设备主体的底部。
14、本发明的有益效果是:与现有技术相比,本发明的水下清洁设备,通过进气单元与储气单元的配合,实现在水中的自主上升与下沉,且通过对储气单元的布局,使得在上升或下降的过程中,整体机构较为稳定,不易出现侧翻的情形,通过配置的通信模块、履带以及螺旋桨,能够适应更多的使用场景,拥有较强的实用性和经济性。
技术特征:
1.一种水下清洁设备,其特征在于,包括:
2.根据权利要求1所述的水下清洁设备,其特征在于,所述换气装置为气口浮子,所述气口浮子包括第一部分和第二部分,所述第一部分位于所述第二部分下方,所述第一部分与所述第二部分中设有贯穿的通孔,所述通孔位于所述第一部分的一端与所述通气管连接,所述通孔位于所述第二部分的一端与外部相通。
3.根据权利要求1所述的水下清洁设备,其特征在于,所述水下清洁设备中设有通信模块,所述通信模块配置为接收外部的控制信号。
4.根据权利要求1所述的水下清洁设备,其特征在于,所述储气单元采用气囊。
5.根据权利要求1所述的水下清洁设备,其特征在于,所述密封阀为单向阀或电磁阀。
6.根据权利要求1所述的水下清洁设备,其特征在于,所述气泵为柱塞泵、蠕动泵、隔膜泵、齿轮泵中的一种。
7.根据权利要求1所述的水下清洁设备,其特征在于,所述水下清洁设备还包括螺旋桨,所述螺旋桨配置为驱动所述水下清洁设备进行水平方向上的运动。
8.根据权利要求1所述的水下清洁设备,其特征在于,所述水下清洁设备还包括履带,所述履带安装于所述设备主体的底部。
9.根据权利要求1所述的水下清洁设备,其特征在于,所述水下清洁设备还包括清洁主刷,所述清洁主刷安装于所述设备主体的底部。
技术总结
本发明提供了一种水下清洁设备,所述水下清洁设备包括:设备主体;储气单元,用于存储空气,安装于设备主体中的顶端处;进气单元,包括气泵、密封阀和换气装置,所述换气装置通过通气管与所述气泵连接,所述气泵通过所述密封阀与所述换气装置连接,通过控制所述气泵工作来向所述储气单元添加或排放空气,以实现水下清洁设备在竖直方向上进行上升或下沉。通过进气单元与储气单元的配合,实现在水中的自主上升与下沉,且通过对储气单元的布局,使得在上升或下降的过程中,整体机构较为稳定,不易出现侧翻的情形,通过配置的通信模块、履带以及螺旋桨,能够适应更多的使用场景,拥有较强的实用性和经济性。
技术研发人员:郭豹
受保护的技术使用者:环想机器人科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!