一种用于变截面墙体的液压爬模架体爬升方法与流程
本发明涉及墙体建造,特别是涉及一种用于变截面墙体的液压爬模架体爬升方法。
背景技术:
1、在超高层建筑中,核心筒+外框结构是常见的结构形式,施工过程中也常用液压爬模系统进行核心筒垂直和水平结构施工。液压爬模系统有自动导向、液压升降、自动复位的锁定机构,能实现架体与导轨互爬的功能。
2、由于核心筒内、外墙截面尺寸随着结构高度增加而变化,因此爬模的爬升措施根据墙体截面尺寸变化而不同。当墙体每次内缩小于等于100mm时,爬模架体可以通过自身斜爬功能爬升通过,并采用平台翻板进行防护。
3、但是爬模架体自身斜爬时能够达到的最大倾角为5度,当墙体内缩大于150mm时,爬模架体的上下两端分别处于上下两截墙体上,此时爬模架体的倾角将大于5度,超处爬模架体的爬升范围,影响施工安全。
技术实现思路
1、本发明的目的是:提供一种用于变截面墙体的液压爬模架体爬升方法,以解决现有技术中的墙体内缩大于150mm导致爬模架体的倾角大于5度,超出爬模架体爬升范围的问题。
2、为了实现上述目的,本发明提供了一种用于变截面墙体的液压爬模架体爬升方法,包括以下步骤:
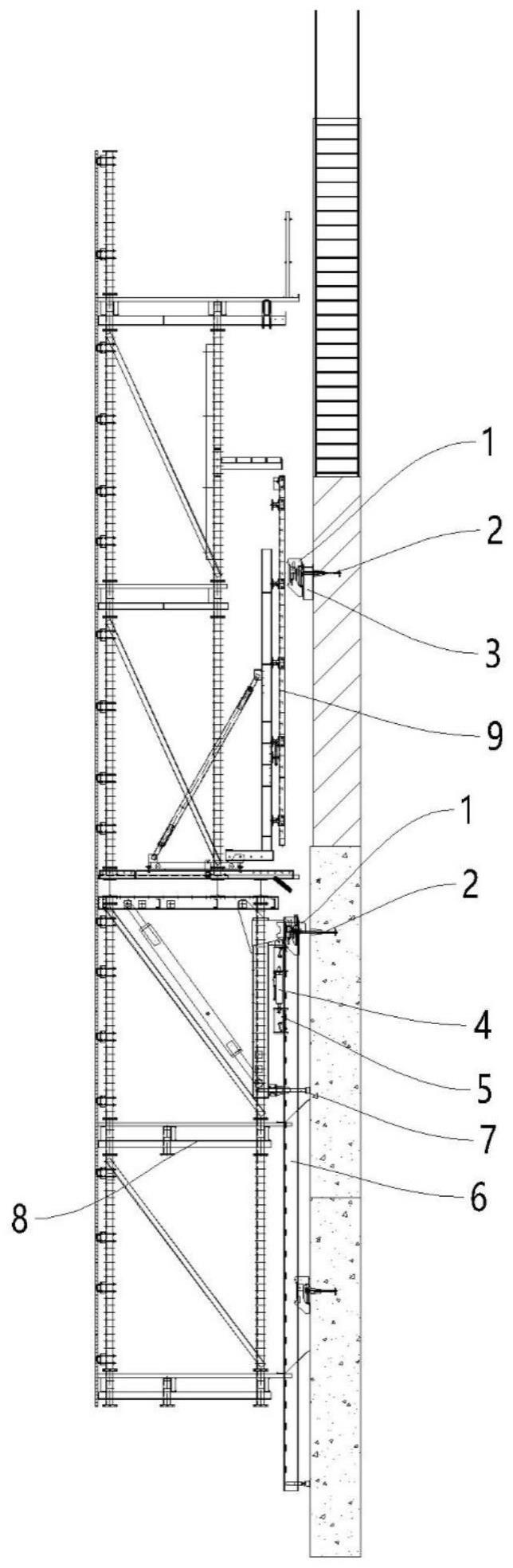
3、s1,测量竖向位于下层的第一墙体与位于上层的第二墙体之间的内缩尺寸,根据内缩尺寸制作垫块,将垫块安装在第二墙体上,使得爬模架体的爬升角度小于等于5度;
4、s2,在垫块上固定附墙挂座,提升爬模架体的导轨,使导轨脱离第一墙体上的附墙挂座并向上移动,使导轨与垫块上的附墙挂座连接并呈现倾斜状态;
5、s3,调节爬模架体的附墙撑丝杆并驱动爬模架体的底端离开第一墙体,使爬模架体倾斜并与导轨平行,爬模架体沿导轨向上爬升,完成爬模架体爬升作业。
6、优选地,步骤s1中,在第二墙体上预留爬锥,垫块以及附墙挂座通过同一组爬锥固定在第二墙体上。
7、优选地,步骤s1中,垫块在制作时预留安装孔,安装孔的位置与爬锥的位置对应。
8、优选地,步骤s1中,垫块为长方体的垫盒,垫块的长度大于附墙挂座的长度,垫块的宽度大于附墙挂座的宽度。
9、优选地,步骤s1中,垫块的长度为42cm,宽度为40cm。
10、优选地,步骤s2中,提升导轨时,将爬模架体的位于第一墙体上的上下转向盒的固定开关打开,使上下转向盒的顶升方向对准导轨上的卡扣,利用液压油缸驱动上下转向盒顶升导轨。
11、优选地,步骤s3中,爬模架体爬升时,将转换上下转向盒的固定开关调至另一角度,使上下转向盒的顶升方向对准爬模架体的卡扣,利用液压油缸驱动上下转向盒顶升爬模架体。
12、优选地,还包括步骤s4,爬模架体爬升到位后,调整附墙撑丝杆,使爬模架体恢复至竖直状态。
13、本发明实施例一种用于变截面墙体的液压爬模架体爬升方法与现有技术相比,其有益效果在于:当墙体内缩大时,根据墙体内缩量制作垫块,将附墙挂座固定在垫块上,利用垫块减小第一墙体上的附墙挂座与第二墙体上的附墙挂座之间的内缩间距,从而使得爬模架体的爬升角度小于等于5度,然后再提升导轨呈倾斜状态,爬模架体与导轨平行后在导轨上爬升完成爬升作业,爬模架体在爬升时的角度小于等于5度,爬模架体可通过自身斜爬的功能爬升通过,保证施工安全。
技术特征:
1.一种用于变截面墙体的液压爬模架体爬升方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,步骤s1中,在第二墙体上预留爬锥,垫块以及附墙挂座通过同一组爬锥固定在第二墙体上。
3.根据权利要求2所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,步骤s1中,垫块在制作时预留安装孔,安装孔的位置与爬锥的位置对应。
4.根据权利要求1-3任一项所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,步骤s1中,垫块为长方体的垫盒,垫块的长度大于附墙挂座的长度,垫块的宽度大于附墙挂座的宽度。
5.根据权利要求4所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,步骤s1中,垫块的长度为42cm,宽度为40cm。
6.根据权利要求1-3任一项所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,步骤s2中,提升导轨时,将爬模架体的位于第一墙体上的上下转向盒的固定开关打开,使上下转向盒的顶升方向对准导轨上的卡扣,利用液压油缸驱动上下转向盒顶升导轨。
7.根据权利要求6所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,步骤s3中,爬模架体爬升时,将转换上下转向盒的固定开关调至另一角度,使上下转向盒的顶升方向对准爬模架体的卡扣,利用液压油缸驱动上下转向盒顶升爬模架体。
8.根据权利要求1-3任一项所述的用于变截面墙体的液压爬模架体爬升方法,其特征在于,还包括步骤s4,爬模架体爬升到位后,调整附墙撑丝杆,使爬模架体恢复至竖直状态。
技术总结
本发明涉及墙体建造技术领域,公开了一种用于变截面墙体的液压爬模架体爬升方法,包括以下步骤:S1,测量竖向位于下层的第一墙体与位于上层的第二墙体之间的内缩尺寸,根据内缩尺寸制作垫块,将垫块安装在第二墙体上,使得爬模架体的爬升角度小于等于5度;S2,在垫块上固定附墙挂座,提升爬模架体的导轨,使导轨与垫块上的附墙挂座连接并呈现倾斜状态;S3,调节爬模架体的附墙撑丝杆并驱动爬模架体的底端离开第一墙体,爬模架体沿导轨爬升,完成爬升作业。当墙体内缩大时,利用垫块减小第一墙体上的附墙挂座与第二墙体上的附墙挂座之间的内缩间距,爬模架体在爬升时的角度小于等于5度,爬模架体可通过自身斜爬的功能爬升通过,保证施工安全。
技术研发人员:邝喜旗,李嘉祺,李日荣,陈志标,郭俊才,周琴
受保护的技术使用者:中国建筑第二工程局有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!