一种四夹爪同步定心夹紧机械手及多工位机械手装置的制作方法
本发明属于机械手,尤其涉及一种四夹爪同步定心夹紧机械手及多工位机械手装置。
背景技术:
1、在利用加工中心加工工件时,需要先对工件进行定位。
2、现有技术中,主要依靠人工用直角靠尺等工具校准工件位于工作台上的位置,以实现工件的定位。定位完成后,再手动启动加工程序进行加工,加工完成后得到所需产品。
3、现有技术的不足在于,采用人工手持靠尺定位工件的方式,存在定位精度低,稳定性差,效率低,不适用于精度要求较高的工件(如手机显示屏、手机后盖、手表盖、汽车和平板显示屏)的问题。具体为:依靠工人定位工件的方式,工件的位置具有偏差,造成启动自动加工程序后加工出来的产品尺寸不稳定,良品率低。且人工定位时,需利用工具反复校准,效率低下。
4、因此,实有必要提供一种新的四夹爪同步定心夹紧机械手及多工位机械手装置解决上述技术问题。
技术实现思路
1、(一)要解决的技术问题
2、基于此,本发明提供了一种四夹爪同步定心夹紧机械手及多工位机械手装置,以解决现有工件定位方式存在的定位精度低,稳定性差及效率低的技术问题。
3、(二)技术方案
4、为解决上述技术问题,本发明提出了一种四夹爪同步定心夹紧机械手,包括缸体和十字形分气杆,所述缸体的上部设有凹陷而成的十字形收容槽,所述十字形收容槽包括中心收容槽和均匀环绕所述中心收容槽设置的四个所述边部收容槽,每个边部收容槽内设有一个筒状滑柱,所述筒状滑柱与边部收容槽滑动相连,每个所述筒状滑柱远离所述中心收容槽的一端固定设有一套夹爪组件;所述十字形分气杆为一体结构,且所述十字形分气杆包括中心块和均匀环绕所述中心块设置的四个分气杆,所述中心块卡接于所述中心收容槽内,四个所述分气杆一一对应插入四个所述筒状滑柱内,每个分气杆上均设有一个活塞头,所述活塞头将筒状滑柱内腔分隔为封闭的b腔和a腔;所述十字形分气杆上设有同时连通所有所述b腔的气杆b气路,所述十字形分气杆上还设有同时连通所有所述a腔的气杆a气路,所述缸体的下部还设有与所述气杆b气路连通的缸b气路,通过所述缸b气路引入外接气源,经所述气杆b气路进入所述b腔,以驱动所述夹爪组件打开;所述缸体的下部还设有与所述气杆a气路连通的缸a气路,通过所述a气路引入外接气源,经所述气杆a气路进入所述a腔,以驱动所述夹爪组件收回;所述缸体顶部设有完全遮盖所述十字形收容槽顶部的盖板,所述盖板的顶部设有真空吸孔,所述盖板上还设有与所述真空吸孔连通的真空气路。
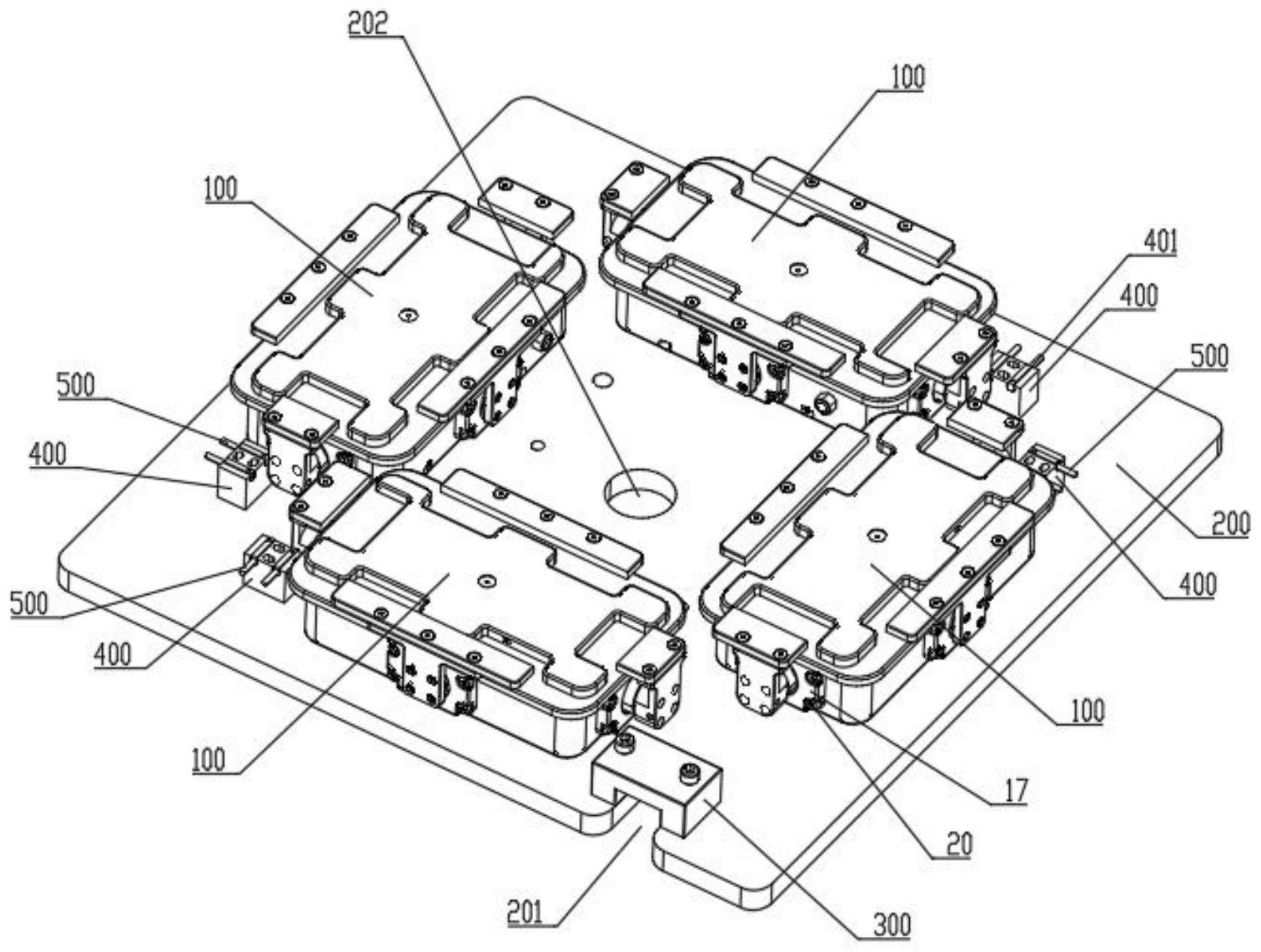
5、本发明还提出了一种多工位机械手装置,包括底板和如上所述的四夹爪同步定心夹紧机械手,所述四夹爪同步定心夹紧机械手的数量为多套,多套所述四夹爪同步定心夹紧机械手分别间隔安装于所述底板上部,所述底板的一侧设有缺口,所述缺口处设置有门型收线架;每个所述四夹爪同步定心夹紧机械手的一侧固定设有一个卡块,所述卡块安装于所述底板上,所述卡块上设有卡槽,所述卡槽内卡接有用于自动感应所述夹爪组件的伸缩行程的磁性开关,所述多工位机械手装置还包括传输线,所述传输线的一端与所述磁性开关相连,所述传输线的另一端穿过所述门型收线架与控制系统相连。
6、(三)有益效果
7、与现有技术相比,本发明的四夹爪同步定心夹紧机械手,用于对外形精度要求较高的工件进行自动定位。能够保证工件的精确定位,提高良品率。此外,采用本发明的四夹爪同步定心夹紧机械手,由于设置了传感器,能够自动反馈定位完成的信号,可与控制系统结合,实现产品的自动加工。无需人工手动启动程序进行加工,利于对现有加工中心进行大规模自动化加工改造。
8、本发明适用于对外形尺寸的加工精度要求的工件进行自动定位。具体工件可为用于手机、手表、汽车和平板等产品的玻璃屏和幕玻璃盖板。本发明的四夹爪同步定心夹紧机械手及多工位机械手装置用作该类产品加工的机械手,能够满足对应的精度要求。
技术特征:
1.一种四夹爪同步定心夹紧机械手,其特征在于,包括缸体和十字形分气杆,所述缸体的上部设有凹陷而成的十字形收容槽,所述十字形收容槽包括中心收容槽和均匀环绕所述中心收容槽设置的四个边部收容槽,每个边部收容槽内设有一个筒状滑柱,所述筒状滑柱与边部收容槽滑动相连,每个所述筒状滑柱远离所述中心收容槽的一端固定设有一套夹爪组件;所述十字形分气杆为一体结构,且所述十字形分气杆包括中心块和均匀环绕所述中心块设置的四个分气杆,所述中心块卡接于所述中心收容槽内,四个所述分气杆一一对应插入四个所述筒状滑柱内,每个分气杆上均设有一个活塞头,所述活塞头将筒状滑柱内腔分隔为封闭的b腔和a腔;所述十字形分气杆上设有同时连通所有所述b腔的气杆b气路,所述十字形分气杆上还设有同时连通所有所述a腔的气杆a气路,所述缸体的下部还设有与所述气杆b气路连通的缸b气路,通过所述缸b气路引入外接气源,经所述气杆b气路进入所述b腔,以驱动所述夹爪组件打开;所述缸体的下部还设有与所述气杆a气路连通的缸a气路,通过所述a气路引入外接气源,经所述气杆a气路进入所述a腔,以驱动所述夹爪组件收回;所述缸体顶部设有完全遮盖所述十字形收容槽顶部的盖板,所述盖板的顶部设有真空吸孔,所述盖板上还设有与所述真空吸孔连通的真空气路。
2.根据权利要求1所述的四夹爪同步定心夹紧机械手,其特征在于,所述缸体和盖板之间设有用于控制四个所述筒状滑柱同步滑动的同步组件;所述中心块顶部中心位置设有凹陷而成的轴槽,所述盖板的底部设有凹陷而成的盘槽;所述同步组件包括:台阶轴、轴承、联动销和同步盘,所述同步盘整体为圆盘状,所述同步盘的中心设有盘安装孔,所述同步盘上还设有四条均匀环绕所述盘安装孔设置的孤状的同步槽,所述台阶轴的侧部凸起形成环状的轴肩,所述轴肩的下部落于所述中心块顶面,所述台阶轴的下部伸入所述轴槽内,所述台阶轴的上部与所述同步盘的中心转动相连;所述同步盘的顶部收容于所述盘槽内,且所述同步盘的顶部与所述盘槽的底部设有间隙;所述轴承设于所述台阶轴和盘安装孔之间;每个所述同步槽内设有一个所述联动销,所述联动销的上部与所述同步槽滑动相连,一个所述联动销的下部对应与一个所述筒状滑柱相连。
3.根据权利要求2所述的四夹爪同步定心夹紧机械手,其特征在于,所述筒状滑柱的顶部设有滑柱销孔,所述联动销的下部伸入且固定于所述滑柱销孔内;所述盖板和缸体之间设有第一密封圈,且所述第一密封圈环绕所述十字形收容槽设置。
4.根据权利要求3所述的四夹爪同步定心夹紧机械手,其特征在于,所述筒状滑柱包括相连的方柱段和圆柱段,所述筒状滑柱内腔同时贯穿所述方柱段和圆柱段,所述方柱段横截面的外轮廓为正方形,所述圆柱段的横截面的外轮廓为圆形,所述方柱段远离所述圆柱段的一端固定设有连耳,所述连耳的顶侧面与所述方柱段顶侧面平齐,所述方柱段的前后两个侧面分别设有两条凹陷而成的第一导向槽,所述边部收容槽的形状与所述方柱段形状相匹配,所述边部收容槽的两个相对的侧壁的与所述第一导向槽对应的位置上设有凹陷而成的第二导向槽,一个所述第一导向槽和对应的第二导向槽共同围成一个导向腔,所述导向腔内设有能够绕自身轴线旋转的滚柱,所述滚柱通过固定片安装于所述缸体上,每个所述固定片上设有多个所述滚柱,每个所述导向腔对应设置两个所述固定片;所述方柱段的前面两个侧面还设有多个凹陷而成的滑移避让槽。
5.根据权利要求4所述的四夹爪同步定心夹紧机械手,其特征在于,每个所述边部收容槽远离远离所述中心收容槽的一侧设有一个密封侧盖,所述圆柱段贯穿所述密封侧盖,所述密封侧盖与所述圆柱段之间设有用于实现滑动密封的第二密封圈,所述密封侧盖和盖板之间设有第三密封圈;所述密封侧盖整体为矩形,且所述密封侧盖通过螺纹连接件固定于所述缸体上。
6.根据权利要求5所述的四夹爪同步定心夹紧机械手,其特征在于,所述中心收容槽的槽底设有多个缸销孔,所述中心块的底部对应所述缸销孔的位置设有心块销孔,所述四夹爪同步定心夹紧机械手还包括气杆定位销,所述气杆定位销的下部插入所述缸销孔,所述气杆定位销的上部插入所述心块销孔。
7.根据权利要求6所述的四夹爪同步定心夹紧机械手,其特征在于,所述夹爪组件包括:爪架、夹头和爪销,所述爪架包括竖架,所述竖架的一侧固定设有整体为圆柱状的对接头,所述对接头上设有凸起且伸入所述筒状滑柱内腔的塞柱,所述塞柱整体为圆柱状,所述塞柱与筒状滑柱内腔之间设有第四密封圈,所述圆柱段远离所述方柱段的一端设有多个第一爪架销钉孔,所述对接头上设有正对所述第一爪架销钉孔设置的第二爪架销钉孔,通过所述爪销插入所述第一爪架销钉孔和第二爪架销钉孔,实现将所述爪架固定于所述筒状滑柱上;通过螺纹连接件将所述夹头固定于所述竖架的顶部,所述盖板正对所述夹头的位置设有凹陷而成的行程避让槽,所述夹头的底部高于所述行程避让槽的底部。
8.根据权利要求7所述的四夹爪同步定心夹紧机械手,其特征在于,所述中心收容槽为正方形,四个所述边部收容槽分别与所述中心收容槽的四个边部连通,所述中心块与所述中心收容槽形状相匹配;四个所述分气杆分别为:第一纵边分气杆、第二纵边分气杆、第三横边分气杆和第四横边分气杆;四个所述边部收容槽分别为:第一纵边收容槽、第二纵边收容槽、第三横边收容槽和第四横边收容槽,所述第一纵边收容槽和第二纵边收容槽相对设置;所述第一纵边分气杆、第二纵边分气杆、第三横边分气杆和第四横边分气杆分别一一对应与第一纵边收容槽、第二纵边收容槽、第三横边收容槽和第四横边收容槽滑动相连;所述第一纵边分气杆和第二纵边分气杆的长度相等,所述第三横边分气杆和第四横边分气杆的长度相等,所述缸体整体为长方形,所述第一纵边分气杆的长度大于第三横边分气杆的长度,所述第一纵边分气杆的长度方向与所述缸体的长度方向一致。
9.一种多工位机械手装置,其特征在于,包括底板和如权利要求1-8任一项所述的四夹爪同步定心夹紧机械手,所述四夹爪同步定心夹紧机械手的数量为多套,多套所述四夹爪同步定心夹紧机械手分别间隔安装于所述底板上部,所述底板的一侧设有缺口,所述缺口处设置有门型收线架;每个所述四夹爪同步定心夹紧机械手的一侧固定设有一个卡块,所述卡块安装于所述底板上,所述卡块上设有卡槽,所述卡槽内卡接有用于自动感应所述夹爪组件的伸缩行程的磁性开关,所述多工位机械手装置还包括传输线,所述传输线的一端与所述磁性开关相连,所述传输线的另一端穿过所述门型收线架与控制系统相连。
10.根据权利要求9所述的多工位机械手装置,其特征在于,所述缸体的底部设置凸起的安装定位销,所述底板上设有与所述安装定位销对应的安装定位孔,通过所述安装定位销插入所述安装定位孔内,实现所述四夹爪同步定心夹紧机械手的定位及安装;所述底板的下部设有b气接头,所述b气接头的一端与所述缸b气路连通,所述b气接头的另一端与所述外接气源连通;所述底板的下部设有a气接头,所述a气接头的一端与所述缸a气路连通,所述a气接头的另一端与所述外接气源连通;所述底板整体为矩形,且所述底板的中心设有装置安装孔,多套所述四夹爪同步定心夹紧机械手环绕所述装置安装孔设置。
技术总结
本发明公开了一种四夹爪同步定心夹紧机械手,包括缸体和十字形分气杆,缸体的上部设有凹陷而成的十字形收容槽,十字形收容槽包括中心收容槽和均匀环绕中心收容槽设置的四个边部收容槽,每个边部收容槽内设有一个筒状滑柱,筒状滑柱与边部收容槽滑动相连,每个筒状滑柱远离中心收容槽的一端固定设有一套夹爪组件;十字形分气杆为一体结构,且十字形分气杆包括中心块和均匀环绕中心块设置的四个分气杆,中心块卡接于中心收容槽内。本发明还公开了一种多工位机械手装置,包括底板和上述的四夹爪同步定心夹紧机械手。与现有技术相比,本发明用于对外形精度要求较高的工件进行自动定位。能够保证工件的精确定位,提高良品率。
技术研发人员:李荣,张谭荣,聂后建,黄放波
受保护的技术使用者:湖南伊米森科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!