墙板安装机器人的制作方法
本技术涉及装配式建筑设备,具体涉及一种墙板安装机器人。
背景技术:
1、在墙板安装作业过程中,目前国内墙体的施工安装还是靠传统的纯人力施工或者采用小型设备辅助施工,但因墙板体量较大,其中一块alc墙板大概需要3~6位工人才能完成安装工作。传统施工方法不仅效率低、施工质量稳定性差,且有较高的危险系数,给墙板施工安装带来诸多隐患,较大程度地影响了墙板的应用和发展。
技术实现思路
1、本实用新型的技术方案是这样实现的:
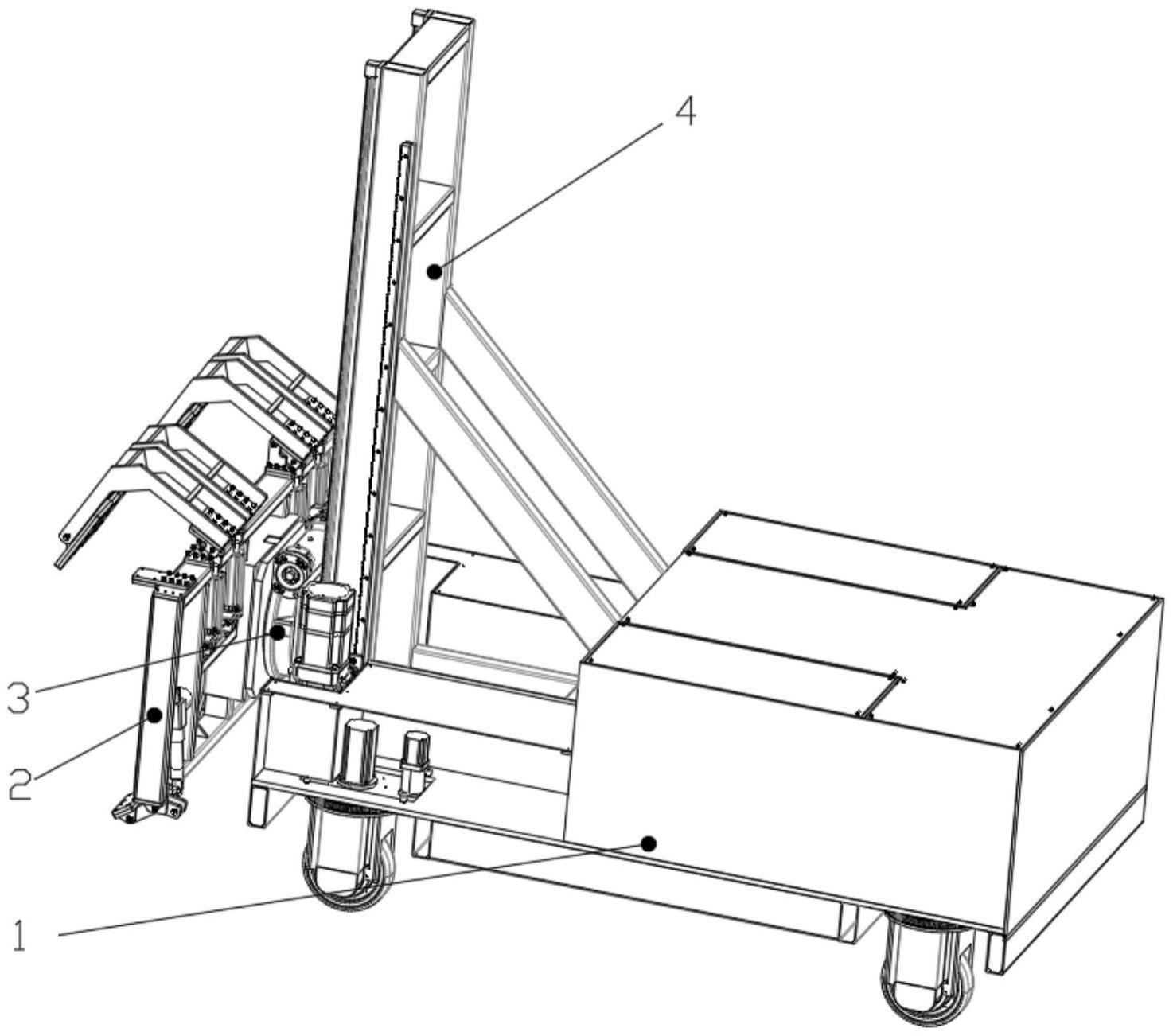
2、墙板安装机器人,包括主体、夹爪组件、旋转组件、抬升组件以及舵轮;所述抬升组件设于所述主体上与所述主体固定连接,所述舵轮设于所述主体下方与所述主体活动连接,所述旋转组件设于所述抬升组件上与所述抬升组件固定连接,所述夹爪组件与所述旋转组件连接。
3、在一些实施例中,所述夹爪组件包括抓取架以及设于所述抓取架上的第一夹爪、第二夹爪和第三夹爪。
4、在一些实施例中,所述旋转组件包括回转驱动电机以及旋转板件,所述回转驱动电机固定在所述旋转板件上。
5、在一些实施例中,所述抬升组件包括抬升驱动电机、抬升板件、齿轮齿条件以及导轨滑块件。
6、在一些实施例中,所述旋转组件与所述导轨滑块件固定连接。
7、在一些实施例中,所述舵轮包括牵引电机、车轮以及转向电机。
8、在一些实施例中,所述舵轮还包括牵引减速机以及转向减速机。
9、在一些实施例中,还包括外壳,所述外壳设于所述主体上。
10、在一些实施例中,所述舵轮为全向移动舵轮。
11、在一些实施例中,所述抓取架上端两侧各设置有一个所述第二夹爪,在两个所述第二夹爪之间设置有两个第一夹爪,所述抓取架下端两侧各设置有一个所述第三夹爪。
12、与现有技术相比,本实用新型的一种墙板安装机器人,通过各组件间的相互配合,可提升装配式墙板安装设备的自动化程度,提升了施工过程中人员的安全性,降低劳动强度、降低人工成本和施工难度,使用全向移动舵轮很好地解决了大尺寸板材在相对狭小作业空间移动难问题,全向移动底盘设计保证板材可在狭小空间内灵活进行位置调整和姿态调整。
技术特征:
1.墙板安装机器人,其特征在于,包括主体(1)、夹爪组件(2)、旋转组件(3)、抬升组件(4)以及舵轮(5);
2.根据权利要求1所述的墙板安装机器人,其特征在于,所述夹爪组件(2)包括抓取架(21)以及设于所述抓取架(21)上的第一夹爪(22)、第二夹爪(23)和第三夹爪(24)。
3.根据权利要求1所述的墙板安装机器人,其特征在于,所述旋转组件(3)包括回转驱动电机(31)以及旋转板件(32),所述回转驱动电机(31)固定在所述旋转板件(32)上。
4.根据权利要求1所述的墙板安装机器人,其特征在于,所述抬升组件(4)包括抬升驱动电机(41)、抬升板件(42)、齿轮齿条件(43)以及导轨滑块件(44)。
5.根据权利要求4所述的墙板安装机器人,其特征在于,所述旋转组件(3)与所述导轨滑块件(44)固定连接。
6.根据权利要求1所述的墙板安装机器人,其特征在于,所述舵轮(5)包括牵引电机、车轮以及转向电机。
7.根据权利要求6所述的墙板安装机器人,其特征在于,所述舵轮(5)还包括牵引减速机以及转向减速机。
8.根据权利要求1-7任一项所述的墙板安装机器人,其特征在于,还包括外壳(6),所述外壳(6)设于所述主体(1)上。
9.根据权利要求1-7任一项所述的墙板安装机器人,其特征在于,所述舵轮(5)为全向移动舵轮(5)。
10.根据权利要求2所述的墙板安装机器人,其特征在于,所述抓取架(21)上端两侧各设置有一个所述第二夹爪(23),在两个所述第二夹爪(23)之间设置有两个第一夹爪(22),所述抓取架(21)下端两侧各设置有一个所述第三夹爪(24)。
技术总结
本技术公开了一种墙板安装机器人,包括主体、夹爪组件、旋转组件、抬升组件以及舵轮;抬升组件设于主体上与主体固定连接,舵轮设于主体下方与主体活动连接,旋转组件设于抬升组件上与抬升组件固定连接,夹爪组件与旋转组件连接。本技术的墙板安装机器人,通过各组件间的相互配合,可提升装配式墙板安装设备的自动化程度,提升了施工过程中人员的安全性,降低劳动强度、降低人工成本和施工难度,使用全向移动舵轮很好地解决了大尺寸板材在相对狭小作业空间移动难问题,全向移动底盘设计保证板材可在狭小空间内灵活进行位置调整和姿态调整。
技术研发人员:陈渝阳,张宇浩,许峰榕,刘李正,聂卫健,许哲
受保护的技术使用者:深圳卓蚁科技有限公司
技术研发日:20230328
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!