环氧树脂刮涂机器人
本技术涉及刮涂机器人,具体为环氧树脂刮涂机器人。
背景技术:
1、现代工业不断朝着自动化、电子化的方向发展,高科技型企业、重点实验室及产品加工车间对地面环境的要求极高,不仅要求地面具有防静电功能,而且要求地面具有高耐磨和高抗冲击性,环氧树脂自流平防静电地坪漆涂装能够满足这样的要求,实现高耐磨、高抗冲击性与防静电功能的三效合一。环氧树脂砂浆自流平施工工艺分为以下步骤:一、原始水泥地面打磨;二、刮涂环氧树脂底漆;三、刮涂第二遍环氧底漆;四、刮涂环氧树脂砂浆层;五、环氧砂浆层打磨;六、批涂环氧腻子层;七、刮涂环氧自流平面漆。
2、其中第二、第三、第四、第六和第七步均为人工刮涂,而施工场地均有平坦且面积非常大的特点,人工刮涂效率不高又耗时间,费时费力。因此,设计一种环氧树脂刮涂机器人是很有必要的。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本实用新型提供环氧树脂刮涂机器人,使用环氧树脂刮涂机器人来代替人工完成环氧树脂涂料的刮涂工作,能大大提升工作效率。
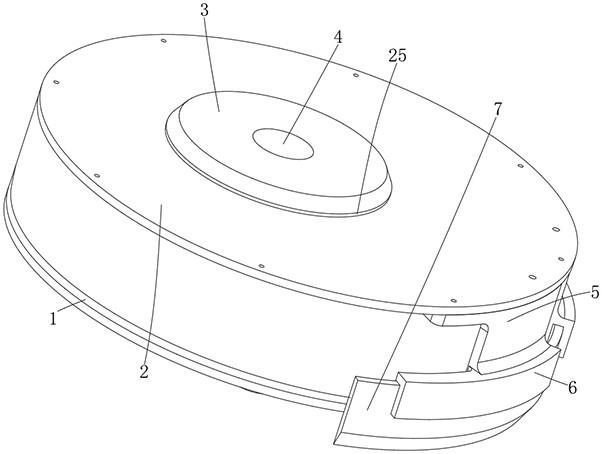
2、为实现上述目的,本实用新型提供如下技术方案:环氧树脂刮涂机器人,包括底盘,所述底盘的顶部固定有上盖,所述底盘的底部对称安装有驱动轮,所述底盘的前侧中心处固定有转向轮,所述底盘的顶部安装有避障传感器、锂离子电池、无线模块和主控板,所述上盖的顶部中心处安装有料桶定位座,所述料桶定位座的中心处开设有与底盘顶部中心处安装的供料机构进口正对应的第一上料口,所述底盘的底部中心处开设有与供料机构出口对应的第一下料口;
3、所述上盖的尾部对称安装有连接架,所述连接架的底部固定有卡座,所述卡座上卡接有刮刀。
4、优选的,所述供料机构包括壳体、伺服电机、电机架、端盖、第二上料口、第二下料口、主动供液齿轮和从动供液齿轮;
5、所述壳体固定在底盘的顶部中心处,所述壳体的底部开设有与第一下料口正对应的第二下料口,所述壳体的顶部开设有与第一上料口正对应的第二上料口,所述壳体的内部转动有相互啮合的主动供液齿轮和从动供液齿轮,所述壳体的顶部通过电机架固定有伺服电机,所述伺服电机与主动供液齿轮传动连接。
6、优选的,所述壳体的侧边安装有磁电式转速传感器,所述磁电式转速传感器电性连接主控板的输入端,所述主控板的输出端电性连接伺服电机。
7、优选的,所述料桶定位座与上盖之间安装有压力传感器,所述压力传感器电性连接主控板的输入端,所述主控板的输出端通过无线模块与控制端通讯连接。
8、优选的,所述主控板采用stm32单片机,所述避障传感器采用超声波传感器。
9、优选的,所述底盘为一种亚克力板材料构件。
10、本实用新型的有益效果为:
11、使用环氧树脂刮涂机器人来代替人工完成环氧树脂涂料的刮涂工作,能大大提升工作效率。
技术特征:
1.环氧树脂刮涂机器人,包括底盘(1),所述底盘(1)的顶部固定有上盖(2),所述底盘(1)的底部对称安装有驱动轮(10),所述底盘(1)的前侧中心处固定有转向轮(9),所述底盘(1)的顶部安装有避障传感器(11)、锂离子电池(12)、无线模块(13)和主控板(14),其特征在于:所述上盖(2)的顶部中心处安装有料桶定位座(3),所述料桶定位座(3)的中心处开设有与底盘(1)顶部中心处安装的供料机构(15)进口正对应的第一上料口(4),所述底盘(1)的底部中心处开设有与供料机构(15)出口对应的第一下料口(8);
2.根据权利要求1所述的环氧树脂刮涂机器人,其特征在于:所述供料机构(15)包括壳体(16)、伺服电机(17)、电机架(18)、端盖(19)、第二上料口(20)、第二下料口(21)、主动供液齿轮(23)和从动供液齿轮(24);
3.根据权利要求2所述的环氧树脂刮涂机器人,其特征在于:所述壳体(16)的侧边安装有磁电式转速传感器(22),所述磁电式转速传感器(22)电性连接主控板(14)的输入端,所述主控板(14)的输出端电性连接伺服电机(17)。
4.根据权利要求1所述的环氧树脂刮涂机器人,其特征在于:所述料桶定位座(3)与上盖(2)之间安装有压力传感器(25),所述压力传感器(25)电性连接主控板(14)的输入端,所述主控板(14)的输出端通过无线模块(13)与控制端通讯连接。
5.根据权利要求1所述的环氧树脂刮涂机器人,其特征在于:所述主控板(14)采用stm32单片机,所述避障传感器(11)采用超声波传感器。
6.根据权利要求1所述的环氧树脂刮涂机器人,其特征在于:所述底盘(1)为一种亚克力板材料构件。
技术总结
本技术公开了环氧树脂刮涂机器人,包括底盘,所述底盘的顶部固定有上盖,所述底盘的底部对称安装有驱动轮,所述底盘的前侧中心处固定有转向轮,所述底盘的顶部安装有避障传感器、锂离子电池、无线模块和主控板,所述上盖的顶部中心处安装有料桶定位座,所述料桶定位座的中心处开设有与底盘顶部中心处安装的供料机构进口正对应的第一上料口,所述底盘的底部中心处开设有与供料机构出口对应的第一下料口,所述上盖的尾部对称安装有连接架,所述连接架的底部固定有卡座,所述卡座上卡接有刮刀。本技术使用环氧树脂刮涂机器人来代替人工完成环氧树脂涂料的刮涂工作,能大大提升工作效率。
技术研发人员:达巴希拉塔,李华强,咸红旭,白勇军,周俊杰
受保护的技术使用者:内蒙古工业大学
技术研发日:20230403
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!