一种智慧梁场箱梁生产用混凝土振捣装置的制作方法
本技术涉及智慧梁场,尤其涉及一种智慧梁场箱梁生产用混凝土振捣装置。
背景技术:
1、智慧梁场为采用智能化设备代替传统人工操作,在生产过程采用数控机械加工钢筋、胎架绑扎钢筋、预应力整体穿束、智能张拉、智能压浆、自动喷淋养护等施工工艺和施工方法,全面提升制梁场安全、质量、效率。
2、用混凝土拌合机拌和好的混凝土浇筑构件时,必须排除其中气泡,进行捣固,使混凝土密实结合,消除混凝土的蜂窝麻面等现象,以提高其强度,保证混凝土构件的质量,上述对混凝土消除气泡、进行捣固的过程即为混凝土振捣。
3、在智慧梁厂箱梁生产施工时,箱梁混凝土大面积振捣作业,都是通过振捣机器人进行振捣作业施工,但是对于箱梁中较小的结构部位进行混凝土振捣作业时,由于振捣机器人自身体积较大,无法对小面积结构部位进行振捣作业,依然采用人工手持振动棒对混凝土进行振捣作业,且在振捣作业过程中,施工作业人员常常处于弯腰状态,因此,在智慧梁厂箱梁生产时,对小面积结构部位进行振捣作业时,存在人工手持振动棒振捣作业劳动强度较大的问题。
技术实现思路
1、基于现有的智慧梁厂箱梁生产时,对小面积结构部位进行振捣作业时,存在人工手持振动棒振捣作业劳动强度较大的技术问题,本实用新型提出了一种智慧梁场箱梁生产用混凝土振捣装置。
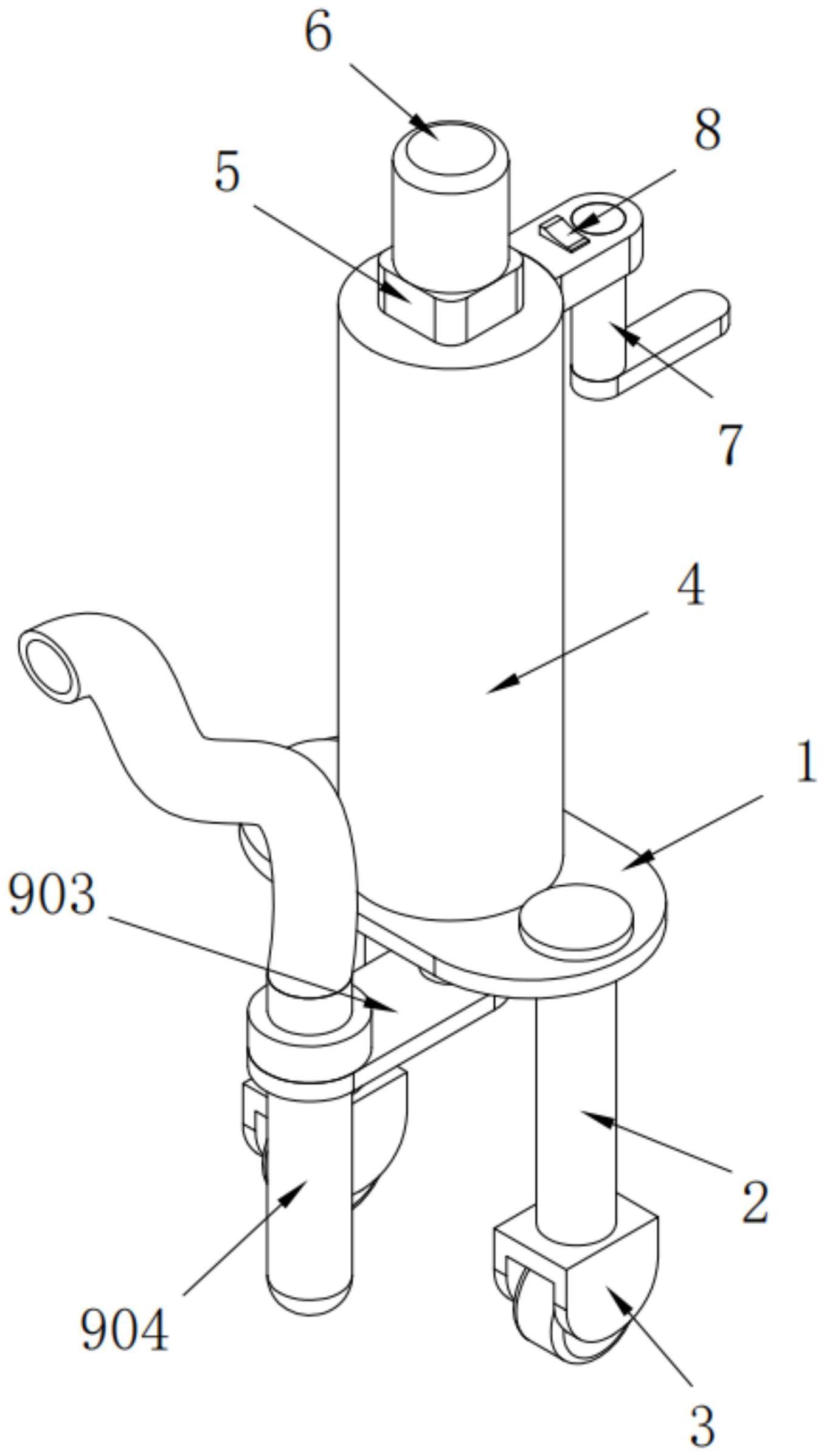
2、本实用新型提出的一种智慧梁场箱梁生产用混凝土振捣装置,包括两端呈圆弧形状的固定支撑板,所述固定支撑板的表面通过轴承转动连接有两个呈对称分布的支撑轴,所述支撑轴的一端固定安装有移动轮。
3、所述固定支撑板的表面固定套接有固定安装管,所述固定安装管的顶部固定安装有减速机,所述减速机的表面固定安装有驱动马达,所述驱动马达的输出轴与所述减速机的动力输入端固定连接,所述固定安装管的表面固定连接有手柄,所述手柄的表面固定安装用于控制所述驱动马达正反转工作的正反转控制开关,所述正反转控制开关通过线缆与所述驱动马达电性连接。
4、所述固定安装管的内壁设置有振捣驱动机构,所述振捣驱动机构包括用于振捣驱动的驱动螺杆,所述驱动螺杆的表面通过轴承与所述固定安装管的内顶壁转动连接。
5、优选地,所述驱动螺杆的一端贯穿并延伸至固定安装管的表面并与所述减速机的动力输出端固定连接。
6、优选地,所述驱动螺杆的表面分别螺纹连接有限位盘和伸缩管,所述限位盘的表面与所述固定安装管的内壁滑动连接,所述伸缩管的一端与所述限位盘的下表面固定连接。
7、优选地,所述伸缩管的另一端贯穿并延伸至所述固定安装管的下表面,所述伸缩管的另一端固定连接有振捣安装板,所述振捣安装板的表面固定安装有振动棒。
8、优选地,所述限位盘的表面滑动连接有两个以所述限位盘的轴线为中心呈对称分布的限位止动杆,所述限位止动杆的两端分别与所述固定安装管的内底壁和内顶壁固定连接。
9、优选地,所述固定安装管的内底壁和内侧壁均固定安装有限位开关,两个所述限位开关均通过线缆与所述驱动马达电性连接。
10、本实用新型中的有益效果为:
11、通过设置振捣驱动机构,在对箱梁混凝土小面积结构部位振捣作业时,施工人员只需要通过手柄推动固定安装管和振动棒,运动到作业位置,然后通过正反转控制开关,控制驱动马达正转,带动振动棒向下运动进入混凝土内,进行振捣作业,并在振动棒完全进入后,通过正反转控制开关控制驱动马达反转,带动振动棒从混凝土内抽出,对混凝土进行振捣作业,作业过程中,无需施工人员手动弯腰振捣作业,从而解决了现有的智慧梁厂箱梁生产时,对小面积结构部位进行振捣作业时,存在人工手持振动棒振捣作业劳动强度较大的问题。
技术特征:
1.一种智慧梁场箱梁生产用混凝土振捣装置,包括两端呈圆弧形状的固定支撑板(1),其特征在于:所述固定支撑板(1)的表面通过轴承转动连接有两个呈对称分布的支撑轴(2),所述支撑轴(2)的一端固定安装有移动轮(3);
2.根据权利要求1所述的一种智慧梁场箱梁生产用混凝土振捣装置,其特征在于:所述驱动螺杆(9)的一端贯穿并延伸至固定安装管(4)的表面并与所述减速机(5)的动力输出端固定连接。
3.根据权利要求2所述的一种智慧梁场箱梁生产用混凝土振捣装置,其特征在于:所述驱动螺杆(9)的表面分别螺纹连接有限位盘(901)和伸缩管(902),所述限位盘(901)的表面与所述固定安装管(4)的内壁滑动连接,所述伸缩管(902)的一端与所述限位盘(901)的下表面固定连接。
4.根据权利要求3所述的一种智慧梁场箱梁生产用混凝土振捣装置,其特征在于:所述伸缩管(902)的另一端贯穿并延伸至所述固定安装管(4)的下表面,所述伸缩管(902)的另一端固定连接有振捣安装板(903),所述振捣安装板(903)的表面固定安装有振动棒(904)。
5.根据权利要求4所述的一种智慧梁场箱梁生产用混凝土振捣装置,其特征在于:所述限位盘(901)的表面滑动连接有两个以所述限位盘(901)的轴线为中心呈对称分布的限位止动杆(905),所述限位止动杆(905)的两端分别与所述固定安装管(4)的内底壁和内顶壁固定连接。
6.根据权利要求1所述的一种智慧梁场箱梁生产用混凝土振捣装置,其特征在于:所述固定安装管(4)的内底壁和内侧壁均固定安装有限位开关(906),两个所述限位开关(906)均通过线缆与所述驱动马达(6)电性连接。
技术总结
本技术属于智慧梁场技术领域,尤其是一种智慧梁场箱梁生产用混凝土振捣装置,包括两端呈圆弧形状的固定支撑板,所述固定支撑板的表面通过轴承转动连接有两个呈对称分布的支撑轴,所述支撑轴的一端固定安装有移动轮。该智慧梁场箱梁生产用混凝土振捣装置,通过设置振捣驱动机构,在对箱梁混凝土小面积结构部位振捣作业时,施工人员只需要通过手柄推动固定安装管和振动棒,运动到作业位置,作业过程中,无需施工人员手动弯腰振捣作业,从而解决了现有的智慧梁厂箱梁生产时,对小面积结构部位进行振捣作业时,存在人工手持振动棒振捣作业劳动强度较大的问题。
技术研发人员:罗肖,李孝旭,陆炎
受保护的技术使用者:中交二公局第七工程有限公司
技术研发日:20230608
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!