一种六轴机械臂和室内喷涂机器人的制作方法
本技术涉及建筑机器人,具体地,涉及一种六轴机械臂和室内喷涂机器人。
背景技术:
1、在建筑装修中,室内墙面装修是主要的装修对象,墙面装修涉及到墙面清理、刮腻子、腻子打磨、乳胶漆喷涂等复杂工艺,传统工艺都是人工完成,施工复杂且劳动强度高,同时在施工过程中伴随粉尘和有毒气体,对人体健康造成严重危害,导致很多年轻人不愿从事这行,而现有从业人员年龄越来越大,必然导致劳动力缺乏和用工成本高等问题。
2、采用喷涂机器人能够缓解上述问题,市面上喷涂机器人执行端采用直角坐标和六轴关节机械臂两种结构,如授权公告号为cn213927352u的中国实用新型专利,公开一种喷涂机器人,包括:机器人本体;升降机构,安装在机器人本体上,升降机构的至少部分沿竖直方向可移动地设置;机械臂组件,安装在升降机构上,以通过升降机构带动机械臂组件沿竖直方向移动;喷涂机构,安装在机械臂组件上,以通过机械臂组件带动喷涂机构移动以进行喷涂。该专利采用机械臂组件进行喷涂,采用直角坐标控制系统简单易操作,但受机器人尺寸限制无法在超出机身作业,影响施工效率;采用六轴关节机械臂,可超出机身范围作业,但是在狭窄空间内无法展臂,影响覆盖率。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种六轴机械臂和室内喷涂机器人。
2、本实用新型是通过以下技术方案实现的:
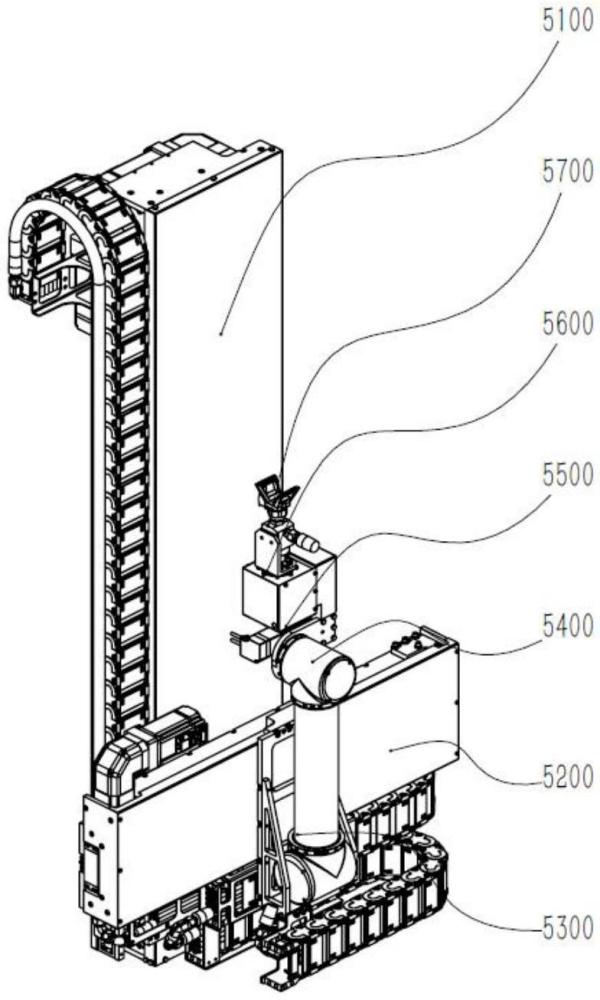
3、根据本实用新型的一个方面,提供一种六轴机械臂,包括:
4、提升模组,用于实现升降运动;
5、横移模组,连接于所述提升模组上,所述横移模组用于实现水平方向移动;
6、手臂俯仰关节,其一端固定于所述横移模组上,所述手臂俯仰关节沿y轴转动,用于实现俯仰运动;
7、手臂旋转关节,连接于所述手臂俯仰关节的另一端,所述手臂旋转关节沿z轴转动,用于实现水平旋转;
8、末端俯仰关节,连接于所述手臂旋转关节上,所述末端俯仰关节沿y轴转动,用于实现上下旋转;
9、末端旋转关节,连接于所述末端俯仰关节上,所述末端旋转关节沿x轴转动。
10、可选的,所述提升模组包括基础提升和末端提升,所述末端提升连接于所述基础提升上。
11、可选的,所述基础提升包括:
12、第一基板;
13、底板,设于所述第一基板的下端;
14、第一侧板和第二侧板,固定于所述底板上,所述第一侧板和所述第二侧板沿所述第一基板的长度方向设置;
15、第一端盖,分别与所述第一侧板和所述第二侧板连接;
16、基础传动组件,包括第一同步带、第一同步轮、第一减速机和第一伺服电机,所述第一减速机连接于所述第一基板的一侧,所述第一伺服电机与所述第一减速机连接,所述第一同步轮连接于所述第一基板的另一侧,所述第一减速机的输出轴与所述第一同步轮连接,所述第一同步带设于所述第一同步轮上;
17、同步带夹板和同步带夹紧板,分别位于所述第一同步带的两侧,所述同步带夹板和所述同步带夹紧板配合夹紧所述第一同步带,所述第一同步带的动能传递至所述同步带夹板上;所述同步带夹板与所述末端提升连接;
18、两条第一直线导轨,分别固定于所述第一侧板和所述第二侧板上,所述第一直线导轨位于所述末端提升的结构中;
19、第一滑块,位于所述第一直线导轨上,在所述第一直线导轨移动时所述第一滑块起到防尘作用。
20、可选的,所述末端提升包括:
21、第二基板,固定于所述第一侧板和所述第二侧板上;
22、第三侧板,设于所述第二基板的两侧;
23、末端传动组件,包括第二同步轮、第二减速机、第二伺服电机、第三同步轮和第二同步带,所述第二减速机连接于所述第二基板的一端,所述第二伺服电机与所述第二减速机连接,所述第二减速机的输出轴与所述第二同步轮连接,所述第三同步轮设于所述第二基板的另一端,所述第二同步轮与所第三同步轮通过所述第二同步带连接;
24、两条第二直线导轨,设于所述第二基板上,所述第二直线导轨上设有第二滑块,两条所述第二直线导轨上的第二滑块通过第一连接板连接;所述第二同步带能够带动所述第一连接板运动;
25、连接块,设于所述第一连接板的两侧,所述连接块与所述横移模组连接。
26、可选的,所述横移模组包括:
27、基础横移,连接于所述末端提升上;
28、末端横移,连接于所述基础横移上。
29、可选的,所述基础横移包括:
30、基础横移基板,与所述第一连接板连接;
31、两个平行的侧板,设于所述基础横移基板上;
32、第二端盖,设于所述两个侧板之间且位于所述侧板的端部;
33、第三减速机,连接于所述基础横移基板上;
34、第三伺服电机,与所述第三减速机连接;
35、第四同步轮,固定于所述基础横移基板上,与所述第三减速机的输出轴连接,所述第四同步轮上连接有用于带动所述末端横移运动的同步带。
36、可选的,所述末端横移包括:
37、末端横移基板,与所述两个平行的侧板连接,所述末端横移基板与所述基础横移基板平行设置;
38、第二连接板和第三连接板,分别与末端横移基板的两端连接;
39、末端电机固定板,两端分别与所述第二连接板和所述第三连接板连接,所述末端电机固定板位于所述末端横移基板的一侧且与所述末端横移基板垂直;
40、第四连接板,两端分别与所述第二连接板和所述第三连接板连接,所述第四连接板位于所述末端横移基板的另一侧且与所述末端平移基板垂直;
41、第四减速机,连接于所述末端电机固定板上;
42、第四伺服电机,与所述第四减速机连接;
43、第五同步轮,与所述第四减速机的输出轴连接;
44、第六同步轮,通过第三同步带与所述第五同步轮连接。
45、可选的,所述六轴机械臂具有以下一种或多种选择:
46、-防尘罩,所述防尘罩覆盖所述末端提升的表面;
47、-缓冲垫,位于所述基础提升的下方,所述缓冲垫设于所述底板上。
48、可选的,所述横移模组包括防尘盖,所述防尘盖覆盖所述末端横移的表面。
49、本实用新型另一方面提供一种室内喷涂机器人,所述机器人包括上述的六轴机械臂。
50、与现有技术相比,本实用新型具有如下至少之一的有益效果:
51、本实用新型的六轴机械臂包括提升模组、横移模组、手臂俯仰关节、手腕旋转关节、末端俯仰关节、末端旋转关节六个自由度,使得机械臂可以在狭窄空间内展臂,能够降低控制难度,便于调节连接于机械臂上的喷枪与待喷涂墙面之间的距离,具有该机械臂的机器人在狭窄空间内,可实现室内乳胶漆和腻子的自动喷涂作业,从而提高喷涂覆盖率和喷涂效率;由于实现了一机两用,从而能够节省成本。
技术特征:
1.一种六轴机械臂,其特征在于,包括:
2.根据权利要求1所述的六轴机械臂,其特征在于,所述提升模组包括基础提升和末端提升,所述末端提升连接于所述基础提升上。
3.根据权利要求2所述的六轴机械臂,其特征在于,所述基础提升包括:
4.根据权利要求3所述的六轴机械臂,其特征在于,所述末端提升包括:
5.根据权利要求4所述的六轴机械臂,其特征在于,所述横移模组包括:
6.根据权利要求5所述的六轴机械臂,其特征在于,所述基础横移包括:
7.根据权利要求6所述的六轴机械臂,其特征在于,所述末端横移包括:
8.根据权利要求3所述的六轴机械臂,其特征在于,具有以下一种或多种选择:
9.根据权利要求5所述的六轴机械臂,其特征在于,所述横移模组包括防尘盖,所述防尘盖覆盖所述末端横移的表面。
10.一种室内喷涂机器人,其特征在于,包括权利要求1-9任一项所述的六轴机械臂。
技术总结
本技术提供一种六轴机械臂和室内喷涂机器人,所述六轴机械臂包括:提升模组,用于实现升降运动;横移模组,连接于所述提升模组上,所述横移模组用于实现水平方向移动;手臂俯仰关节,其一端固定于所述横移模组上,用于实现俯仰运动;手臂旋转关节,连接于所述手臂俯仰关节的另一端,用于实现水平旋转;末端俯仰关节,连接于所述手臂旋转关节上,用于实现上下旋转;末端旋转关节,连接于所述末端俯仰关节上,所述末端旋转关节沿x轴转动。本技术的机械臂可以在狭窄空间内展臂,便于调节连接于机械臂上的喷枪与待喷涂墙面之间的距离,从而提高室内喷涂覆盖率和喷涂效率。
技术研发人员:梁衍学,毛家振
受保护的技术使用者:上海蔚建科技有限公司
技术研发日:20230727
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!