一种钢结构楼房喷涂机器人的制作方法
本技术涉及喷涂机械,具体为一种钢结构楼房喷涂机器人。
背景技术:
1、钢结构楼房是一种新型的建筑体系,而在建筑行业中,对钢结构楼房进行喷涂是一项重要的工作,传统的喷涂方式还是需要人工站在高空作业车上或者脚手架上,手持喷枪进行喷涂,由于高空作业车或者脚手架体积较大,移动较为不方便,所以会有场地受限,效率低,存在一定的危险性,因此,我们提出了一种钢结构楼房喷涂机器人,通过机器人携带喷枪对钢结构楼房的立柱和横梁进行喷涂,替代现有搭载高空作业车或者安装脚手架的人工手持喷枪喷涂模式。
技术实现思路
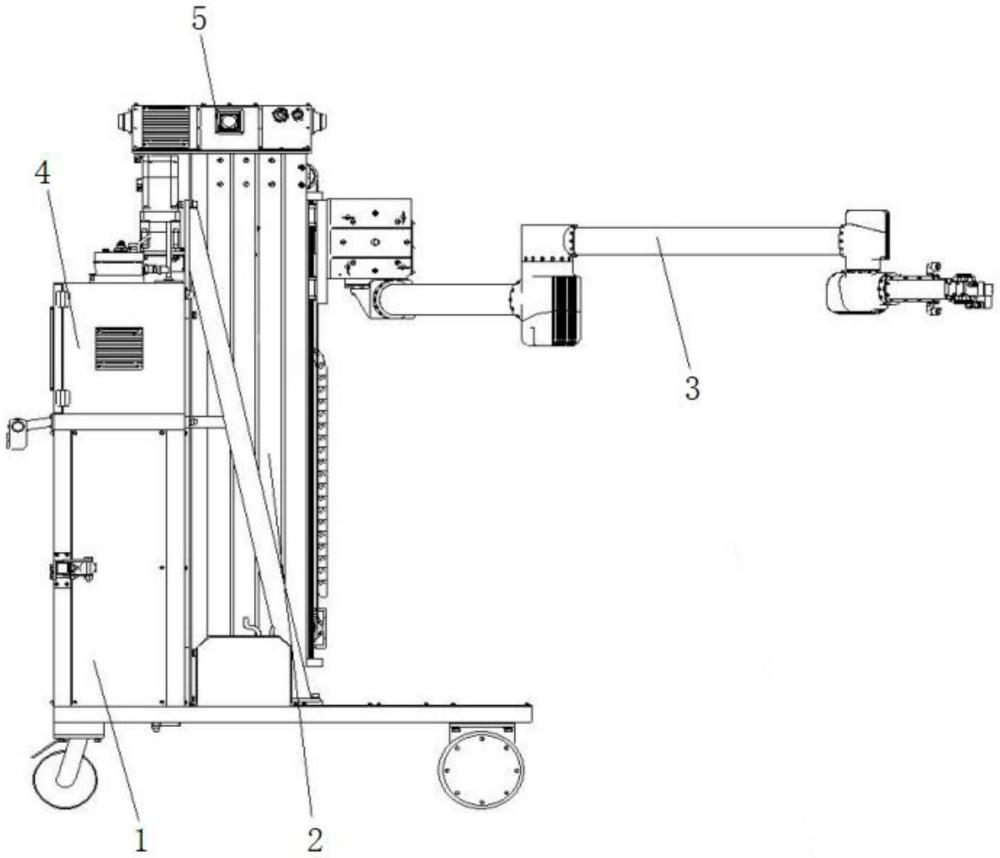
1、鉴于现有技术中所存在的问题,本实用新型公开了一种钢结构楼房喷涂机器人,采用的技术方案是,包括底盘机构、喷涂机构和电控机构,所述底盘机构的左端顶部设置有电控机构,所述电控机构的右前方设置有喷涂机构,所述喷涂机构由机械臂组件与喷枪组件组成,所述底盘机构由把手、驱动轮、电池组件、框架、卷管器、万向轮和雷达测距仪组成,所述框架的底部左端分别前后对称设置有驱动轮,所述框架的底部右端分别前后对称设置有万向轮,所述框架的右侧固定安装有雷达测距仪,所述框架顶部左端设置的立架左侧安装有把手,所述把手上设置有与驱动轮电性连接的控制器,所述立架内侧中部设置有卷管器,所述卷管器的下方设置有电池组件,且电池组件与框架的顶部表面固定连接,所述立架的顶部与电控机构的底部固定连接,所述立架的右侧设置有升降机构一,所述升降机构一由丝杠丝母动力组件、固定架、一级升降架、二级升降链、二级升降架、三级升降链和三级升降架组成,所述固定架固定安装在立架的右侧,所述固定架上设置有丝杠丝母动力组件,所述丝杠丝母动力组件由固定端、活动端丝母、丝杠和伺服电机组成,所述固定端固定安装在固定架的左侧顶部,所述固定端的顶部固定安装有伺服电机,所述伺服电机的输出轴通过驱动装置与固定架内侧底部设置的丝杠顶部驱动连接,所述丝杠上螺纹安装有活动端丝母,所述活动端丝母与滑动安装在固定架外侧的一级升降架固定连接,所述一级升降架的外侧滑动安装有二级升降架,所述二级升降架的外侧滑动安装有三级升降架,所述一级升降架与二级升降架的内侧顶部分别转动安装有动滑轮,所述一级升降架顶部的动滑轮外侧绕设有二级升降链,所述二级升降链的一端与固定架固定连接,所述二级升降链的另一端与二级升降架的内侧底部固定连接,所述二级升降架顶部的动滑轮外侧绕设有三级升降链,所述三级升降链的一端与一级升降架固定连接,所述三级升降链的另一端与三级升降架的内侧底部固定连接,所述三级升降架上设置有升降机构二,所述升降机构二的右端与喷涂机构固定连接,所述三级升降架的顶部设置有雷达机构。
2、作为本实用新型的一种优选技术方案,所述升降机构二由电机减速机组件、同步轮、同步带、张紧轮、升降板和导轨,所述同步轮设置有两个,所述同步轮分别转动安装在三级升降架的内部上下两端,且位于三级升降架底部的同步轮与固定安装在三级升降架底部的电机减速机组件的输出轴固定连接,所述同步轮之间的中部设置有张紧轮,且张紧轮固定安装在三级升降架的内侧中部,所述同步轮与张紧轮之间通过同步带传动连接,所述同步带的右侧固定安装有升降板,且升降板滑动安装在三级升降架右侧设置的导轨上。电机减速机组件通过同步轮驱动同步带,使同步带可带动升降板沿导轨进行上下移动,从而进一步提高喷涂作业的灵活性。
3、作为本实用新型的一种优选技术方案,所述驱动装置为皮带轮传动装置。
4、作为本实用新型的一种优选技术方案,所述机械臂组件为多轴机械臂结构,所述机械臂组件固定安装在升降板的右侧,所述机械臂组件的右端安装有喷枪组件。多轴机械臂结构的机械臂组件可通过关节的折叠,移动喷枪组件到指定位置,喷枪组件由喷枪架,喷枪,开关阀组成,通过机械臂组件的移动,实现各个角度的喷涂。
5、作为本实用新型的一种优选技术方案,所述电控机构包含电控柜、触摸屏、急停开关和遥控器,所述电控柜固定安装在框架顶部左端的立架上,所述电控柜的左侧设置有触摸屏,所述电控柜的顶部设置有急停开关和遥控器。通过电控柜的设置,可用来安装电控机构内部的元器件,触摸屏可用来输入喷涂参数,急停开关可在紧急情况下快速停止该钢结构楼房喷涂机器人动作,遥控器可用来遥控控制机器人进行喷涂动作,如涉及交叉作业,对于一些不允许喷涂的线缆或者其它障碍物,遥控器可手动控制上下升降、机械臂移动、喷枪摆动等动作进行避让,也可以控制在移动过程中是否进行喷涂,从而精准控制移动和喷涂。
6、作为本实用新型的一种优选技术方案,所述雷达机构包含雷达和安装架,所述安装架固定安装在三级升降架的顶部,所述安装架的一端固定安装有雷达。雷达可对高处的物体尺寸和距离进行检测,可以检测出自身与高处物体的相对位置,同时也可以检测到高处物体的轮廓尺寸,反馈到钢结构楼房喷涂机器人上的电控机构,用来完成点云建模、辅助定位和避障动作。
7、作为本实用新型的一种优选技术方案,所述安装架的内部一端设置有风机,所述风机的排气端与安装架外侧设置的风道连通,且风道套装设置在雷达的外侧。风机通过风道对雷达进行吹风,形成风墙保护,防止施工现场的异物落在雷达上。
8、本实用新型的有益效果:本实用新型在底盘机构的作用下,行走到需要喷涂立柱活横梁的指定区域,在电控机构的触摸屏上输入喷涂参数,随后升降机构进行升降动作,且升降过程中,喷涂机构同时动作,对立柱或横梁多个面进行喷涂作业,直至满足电控机构设置的参数,而雷达机构可用来对立柱的截面尺寸进行检测和运动过程中的位置进行反馈,并且对于一些不允许喷涂的线缆或者其它障碍物,遥控器可手动控制上下升降、机械臂移动、喷枪摆动等动作进行避让,也可以控制在移动过程中是否进行喷涂,从而精准控制移动和喷涂;
9、综上,该钢结构楼房喷涂机器人,结构简单,运动灵活,操作模式多样,适用场景广泛,可以替代原有的搭载高空作业车或者安装脚手架的人工喷涂模式,并且,只需要将该钢结构楼房喷涂机器人推到指定位置,输出参数,便可以自动对横梁或者立柱进行喷涂,具有效率高,劳动强度低的特点。
技术特征:
1.一种钢结构楼房喷涂机器人,包括底盘机构(1)、喷涂机构(3)和电控机构(4),所述底盘机构(1)的左端顶部设置有电控机构(4),所述电控机构(4)的右前方设置有喷涂机构(3),所述喷涂机构(3)由机械臂组件(31)与喷枪组件(32)组成,其特征在于,所述底盘机构(1)由把手(11)、驱动轮(12)、电池组件(13)、框架(14)、卷管器(15)、万向轮(16)和雷达测距仪(17)组成,所述框架(14)的底部左端分别前后对称设置有驱动轮(12),所述框架(14)的底部右端分别前后对称设置有万向轮(16),所述框架(14)的右侧固定安装有雷达测距仪(17),所述框架(14)顶部左端设置的立架(141)左侧安装有把手(11),所述把手(11)上设置有与驱动轮(12)电性连接的控制器,所述立架(141)内侧中部设置有卷管器(15),所述卷管器(15)的下方设置有电池组件(13),且电池组件(13)与框架(14)的顶部表面固定连接,所述立架(141)的顶部与电控机构(4)的底部固定连接,所述立架(141)的右侧设置有升降机构一(2),所述升降机构一(2)由丝杠丝母动力组件(21)、固定架(22)、一级升降架(23)、二级升降链(24)、二级升降架(25)、三级升降链(26)和三级升降架(27)组成,所述固定架(22)固定安装在立架(141)的右侧,所述固定架(22)上设置有丝杠丝母动力组件(21),所述丝杠丝母动力组件(21)由固定端(211)、活动端丝母(212)、丝杠(213)和伺服电机(214)组成,所述固定端(211)固定安装在固定架(22)的左侧顶部,所述固定端(211)的顶部固定安装有伺服电机(214),所述伺服电机(214)的输出轴通过驱动装置(29)与固定架(22)内侧底部设置的丝杠(213)顶部驱动连接,所述丝杠(213)上螺纹安装有活动端丝母(212),所述活动端丝母(212)与滑动安装在固定架(22)外侧的一级升降架(23)固定连接,所述一级升降架(23)的外侧滑动安装有二级升降架(25),所述二级升降架(25)的外侧滑动安装有三级升降架(27),所述一级升降架(23)与二级升降架(25)的内侧顶部分别转动安装有动滑轮,所述一级升降架(23)顶部的动滑轮外侧绕设有二级升降链(24),所述二级升降链(24)的一端与固定架(22)固定连接,所述二级升降链(24)的另一端与二级升降架(25)的内侧底部固定连接,所述二级升降架(25)顶部的动滑轮外侧绕设有三级升降链(26),所述三级升降链(26)的一端与一级升降架(23)固定连接,所述三级升降链(26)的另一端与三级升降架(27)的内侧底部固定连接,所述三级升降架(27)上设置有升降机构二(28),所述升降机构二(28)的右端与喷涂机构(3)固定连接,所述三级升降架(27)的顶部设置有雷达机构(5)。
2.根据权利要求1所述的一种钢结构楼房喷涂机器人,其特征在于:所述升降机构二(28)由电机减速机组件(281)、同步轮(282)、同步带(283)、张紧轮(284)、升降板(285)和导轨(286),所述同步轮(282)设置有两个,所述同步轮(282)分别转动安装在三级升降架(27)的内部上下两端,且位于三级升降架(27)底部的同步轮(282)与固定安装在三级升降架(27)底部的电机减速机组件(281)的输出轴固定连接,所述同步轮(282)之间的中部设置有张紧轮(284),且张紧轮(284)固定安装在三级升降架(27)的内侧中部,所述同步轮(282)与张紧轮(284)之间通过同步带(283)传动连接,所述同步带(283)的右侧固定安装有升降板(285),且升降板(285)滑动安装在三级升降架(27)右侧设置的导轨(286)上。
3.根据权利要求1所述的一种钢结构楼房喷涂机器人,其特征在于:所述驱动装置(29)为皮带轮传动装置。
4.根据权利要求2所述的一种钢结构楼房喷涂机器人,其特征在于:所述机械臂组件(31)为多轴机械臂结构,所述机械臂组件(31)固定安装在升降板(285)的右侧,所述机械臂组件(31)的右端安装有喷枪组件(32)。
5.根据权利要求1所述的一种钢结构楼房喷涂机器人,其特征在于:所述电控机构(4)包含电控柜(41)、触摸屏(42)、急停开关(43)和遥控器(44),所述电控柜(41)固定安装在框架(14)顶部左端的立架上,所述电控柜(41)的左侧设置有触摸屏(42),所述电控柜(41)的顶部设置有急停开关(43)和遥控器(44)。
6.根据权利要求1所述的一种钢结构楼房喷涂机器人,其特征在于:所述雷达机构(5)包含雷达(51)和安装架(54),所述安装架(54)固定安装在三级升降架(27)的顶部,所述安装架(54)的一端固定安装有雷达(51)。
7.根据权利要求6所述的一种钢结构楼房喷涂机器人,其特征在于:所述安装架(54)的内部一端设置有风机(53),所述风机(53)的排气端与安装架(54)外侧设置的风道(52)连通,且风道(52)套装设置在雷达(51)的外侧。
技术总结
本技术公开了一种钢结构楼房喷涂机器人,包括底盘机构、喷涂机构和电控机构,底盘机构的左端顶部设置有电控机构,电控机构的右前方设置有喷涂机构,喷涂机构由机械臂组件与喷枪组件组成,底盘机构由把手、驱动轮、电池组件、框架、卷管器、万向轮和雷达测距仪组成,框架的底部左端分别前后对称设置有驱动轮,框架的底部右端分别前后对称设置有万向轮,该钢结构楼房喷涂机器人,结构简单,运动灵活,操作模式多样,适用场景广泛,可以替代原有的搭载高空作业车或者安装脚手架的人工喷涂模式,并且,只需要将该钢结构楼房喷涂机器人推到指定位置,输出参数,便可以自动对横梁或者立柱进行喷涂,具有效率高,劳动强度低的特点。
技术研发人员:高玉涛,江业东,严李李,胡永强,黄世龙,宋晓禹,宋安福,贾文博
受保护的技术使用者:北京克莱明科技有限公司
技术研发日:20231130
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!