一种室内装修施工用智能施工机器人的制作方法
本技术涉及室内装修领域,尤其涉及一种室内装修施工用智能施工机器人。
背景技术:
1、目前,公告号为cn217924162u的中国专利,公开了一种建筑室内装修防水用智能施工机器人,包括安装板和支撑架,所述安装板的顶部固定连接有气缸,所述气缸输出端与支撑架的顶部固定连接,所述安装板的两端均固定连接有立柱,所述立柱的底部固定连接有支撑板,所述支撑板的底部转动连接有行走轮,所述支撑板的外壁上固定连接有与行走轮对应的驱动电机,所述支撑架的一端固定连接有伺服电机,所述伺服电机的输出端固定连接有转棍,所述转棍位于支撑架内的一端绕设有防水布,所述支撑架的两端均固定连接有支撑杆,此实用新型中通过自动铺设机构和行走机构的设置,使装置可以自动的对防水布进行铺设,且有效提升了防水布的铺设齐整性和铺设效率。
2、室内装饰是满足人们的社会活动和生活需要,合理地组织和塑造具有美感而又舒适、方便的室内环境的一种综合性艺术,是环境艺术的一个门类,又称室内设计,融合了现代科学技术与文化艺术,并与建筑设计、地理,装饰艺术、人体工程学、心理学、美学,科技材料学等有着密切的联系,室内装修施工时经常会使用到智能施工机器人,而现有的智能施工机器人大多未设置混料结构,通常是需要工作人员手动进行搅拌的工作,搅拌完成之后将物料倾倒至智能施工机器人的内部进行使用,混料过程较为麻烦,并且物料在长时间静止时容易出现凝固的情况,施工过程较为麻烦,不便于使用者使用。
技术实现思路
1、本实用新型的主要目的是提供一种室内装修施工用智能施工机器人,旨在解决现有的智能施工机器人大多未设置混料结构,通常是需要工作人员手动进行搅拌的工作,搅拌完成之后将物料倾倒至智能施工机器人的内部进行使用,混料过程较为麻烦,并且物料在长时间静止时容易出现凝固的情况,施工过程较为麻烦,不便于使用者使用的问题。
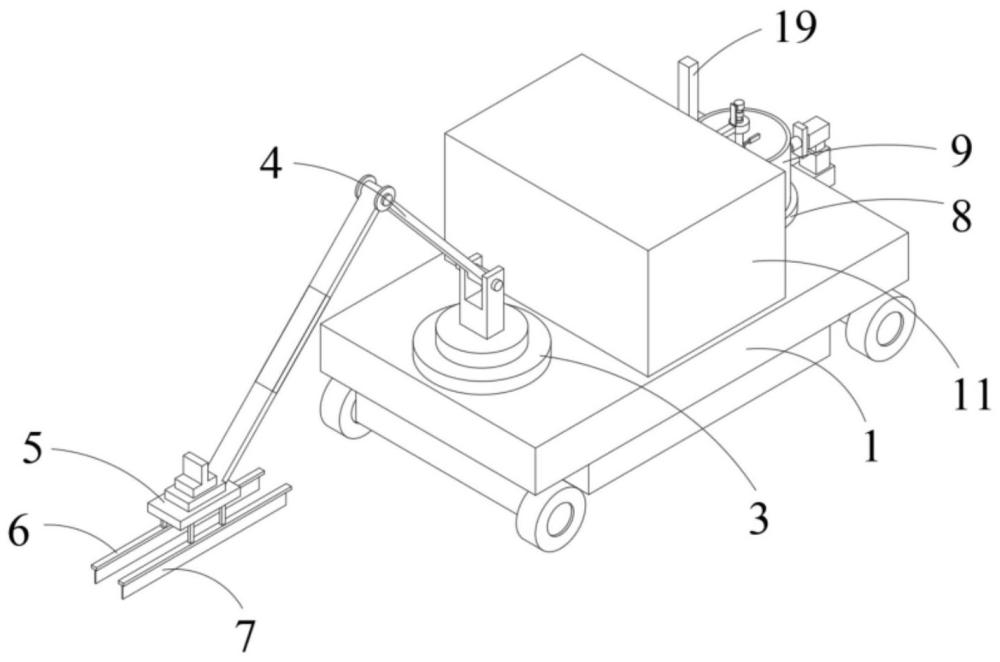
2、为实现上述目的,本实用新型提出的一种室内装修施工用智能施工机器人包括装置本体,所述装置本体的顶部设置有转动架,所述转动架的顶部栓接有机械臂组件,所述机械臂组件的左侧栓接有安装架组件,所述安装架组件的底部栓接有刮动架,所述刮动架的底部栓接有刮板组件,所述装置本体的顶部栓接有放置架,所述放置架的内壁放置有料桶,所述装置本体的顶部设置有转轴,所述转轴的表面栓接有搅拌机构。
3、优选地,所述搅拌机构包括转板、转块和环形块,所述环形块的内壁与转轴的表面栓接,所述转块靠近环形块的一侧与环形块栓接,所述转块靠近转板的一侧与转板栓接。
4、优选地,所述装置本体的顶部栓接有控制箱,所述控制箱的右侧栓接有固定板,所述固定板的右侧栓接有电动伸缩杆。
5、优选地,所述电动伸缩杆的右侧栓接有卡板,所述卡板的右侧与料桶的表面接触。
6、优选地,所述装置本体的右侧栓接有固定块,所述固定块的顶部栓接有升降组件,所述升降组件的顶部栓接有控制块。
7、优选地,所述控制块的左侧栓接有限位组件,所述限位组件的左侧与料桶的表面接触。
8、优选地,所述控制箱的右侧栓接有升降架,所述升降架的右侧栓接有支撑块,所述支撑块的底部固定连通有吸料杆。
9、优选地,所述支撑块的前侧栓接有固定架,所述固定架的顶部设置有输出组件,所述输出组件的底部与转轴的顶部栓接。
10、本实用新型的技术方案中,通过设置装置本体、转动架、机械臂组件、安装架组件、刮动架、刮板组件、放置架、料桶、转轴和搅拌机构,使用时通过装置本体移动至施工位置,接着将料桶放置到放置架的内壁,通过转轴带动搅拌机构进行转动,便于搅拌机构进行稳定搅拌的工作,便于将物料进行均匀搅拌,接着通过装置本体进行施工,便于装置本体带动机械臂组件和安装架组件进行活动,安装架组件活动的同时会带动刮动架进行移动,便于刮动架进行刮平的工作,便于使用者使用。
技术特征:
1.一种室内装修施工用智能施工机器人,其特征在于,所述室内装修施工用智能施工机器人包括装置本体(1),所述装置本体(1)的顶部设置有转动架(3),所述转动架(3)的顶部栓接有机械臂组件(4),所述机械臂组件(4)的左侧栓接有安装架组件(5),所述安装架组件(5)的底部栓接有刮动架(6),所述刮动架(6)的底部栓接有刮板组件(7),所述装置本体(1)的顶部栓接有放置架(8),所述放置架(8)的内壁放置有料桶(9),所述装置本体(1)的顶部设置有转轴(10),所述转轴(10)的表面栓接有搅拌机构(2)。
2.根据权利要求1所述的室内装修施工用智能施工机器人,其特征在于,所述搅拌机构(2)包括转板(201)、转块(202)和环形块(203),所述环形块(203)的内壁与转轴(10)的表面栓接,所述转块(202)靠近环形块(203)的一侧与环形块(203)栓接,所述转块(202)靠近转板(201)的一侧与转板(201)栓接。
3.根据权利要求1所述的室内装修施工用智能施工机器人,其特征在于,所述装置本体(1)的顶部栓接有控制箱(11),所述控制箱(11)的右侧栓接有固定板(12),所述固定板(12)的右侧栓接有电动伸缩杆(13)。
4.根据权利要求3所述的室内装修施工用智能施工机器人,其特征在于,所述电动伸缩杆(13)的右侧栓接有卡板(14),所述卡板(14)的右侧与料桶(9)的表面接触。
5.根据权利要求1所述的室内装修施工用智能施工机器人,其特征在于,所述装置本体(1)的右侧栓接有固定块(15),所述固定块(15)的顶部栓接有升降组件(16),所述升降组件(16)的顶部栓接有控制块(17)。
6.根据权利要求5所述的室内装修施工用智能施工机器人,其特征在于,所述控制块(17)的左侧栓接有限位组件(18),所述限位组件(18)的左侧与料桶(9)的表面接触。
7.根据权利要求4所述的室内装修施工用智能施工机器人,其特征在于,所述控制箱(11)的右侧栓接有升降架(19),所述升降架(19)的右侧栓接有支撑块(20),所述支撑块(20)的底部固定连通有吸料杆(21)。
8.根据权利要求7所述的室内装修施工用智能施工机器人,其特征在于,所述支撑块(20)的前侧栓接有固定架(22),所述固定架(22)的顶部设置有输出组件(23),所述输出组件(23)的底部与转轴(10)的顶部栓接。
技术总结
本技术公开一种室内装修施工用智能施工机器人,其包括装置本体,所述装置本体的顶部设置有转动架,所述转动架的顶部栓接有机械臂组件,所述机械臂组件的左侧栓接有安装架组件,所述安装架组件的底部栓接有刮动架,所述刮动架的底部栓接有刮板组件,所述装置本体的顶部栓接有放置架,所述放置架的内壁放置有料桶,所述装置本体的顶部设置有转轴,所述转轴的表面栓接有搅拌机构,解决了现有的智能施工机器人大多未设置混料结构,通常是需要工作人员手动进行搅拌的工作,搅拌完成之后将物料倾倒至智能施工机器人的内部进行使用,混料过程较为麻烦,并且物料在长时间静止时容易出现凝固的情况,施工过程较为麻烦的问题。
技术研发人员:龚龙海,张瑜,曾慧,张最最
受保护的技术使用者:深圳市金鑫华建设集团有限公司
技术研发日:20231225
技术公布日:2024/8/13
- 还没有人留言评论。精彩留言会获得点赞!