一种二次结构自动补槽机器人的制作方法
本发明属于机器人,具体涉及一种二次结构自动补槽机器人。
背景技术:
1、二次结构施工中,需要在墙面预埋线管,预埋线管需要在墙面开设配管槽,而线管装入配管槽后需要进行补槽,通过补槽将配管槽填平。传统的机电二次结构补槽其施工过程全部为人工操作,由于人为误差原因,经常出现空鼓、补槽面出墙过高等现象,容易造成二次返工;且人工补槽速度慢,不利于项目施工成本管控。
2、随着信息技术和智能机器人技术的不断成熟,以及人力成本的日渐攀升,机器人进入建筑及其他基础设施施工领域已成必然之势。然而,现有技术中尚缺乏针对墙面配管槽进行补槽的机器人,因此,有必要对现有技术进行改进。
技术实现思路
1、本发明公开了一种二次结构自动补槽机器人,该机器人能够完成配管槽的自动补槽,可显著提高施工高效率、保证施工质量,克服了人工补槽效率低、施工质量差的缺陷。
2、为实现上述目的,本发明的技术方案是:
3、一种二次结构自动补槽机器人,包括机器人本体,所述的机器人本体上设有2个第一机械臂,第一机械臂的末端分别连接有配管槽定位板,在2个第一机械臂之间的机器人本体上设有第二机械臂,所述的第二机械臂的末端连接有补槽刀,所述的补槽刀与2个配管槽定位板配合使用,所述的机器人本体上还固定设有浆料容器,所述的浆料容器连接有第三机械臂及出料管,所述的第三机械臂配置为对出料管末端的位置进行控制,所述的出料管与浆料容器连接并用以输出浆料至配管槽。
4、优选的,所述的机器人本体包括底座、行走机构、控制机构,所述的底座下端设有行走机构,行走机构包括行走轮以及用以驱动行走轮移动的驱动电机,所述的底座上安装有用以检测机器人行走速度的速度传感器,所述的速度传感器与控制机构通过导线信号连接,控制机构配置为对行走机构进行控制,所述的底座的侧端分别安装有红外线传感器及距离传感器,所述的红外线传感器、距离传感器也通过导线与控制机构信号连接。
5、优选的,所述的底座上端设有控制箱,所述的控制箱内设有相互电连接的控制机构及蓄电池,底座的上端还固定设有浆料容器,所述的第一机械臂、第二机械臂、第三机械臂分别通过导线与控制机构电连接。
6、优选的,所述的浆料容器为浆料压力罐或者浆料容器顶端连接有压力泵,所述的压力泵的输入端与浆料容器内部连接,输出端通过柔性出料管连接有喷浆管,所述的喷浆管连接于第三机械臂的末端,所述的出料管通过卡座与第三机械臂连接,所述的第三机械臂配置为对喷浆管的位置进行控制。
7、优选的,所述的控制箱顶端设有视觉传感器,所述的视觉传感器通过导线与控制机构信号连接。
8、优选的,所述的机器人本体还配置有控制端,所述的控制端与控制机构通过无线信号连接。
9、优选的,所述的控制端为智能手机。
10、优选的,所述的控制机构包括用以控制机器人行走的第一控制单元、用以对第一至第三机械臂进行控制的第二控制单元、用以对传感器数据进行处理并对机器人动作路径进行规划的第三控制单元,所述的控制盒通过隔板分成3个腔室,第一至第三控制单元分别设置于各自的腔室内。
11、本发明一种二次结构自动补槽机器人的有益效果为:
12、相比于传统的人工补槽,本发明提高了二次结构补槽的速度与精度,保证了补槽的深度,减少了后期的空鼓返工,同时保证了补槽的美观,大大缩短了项目工期,有效节约了项目成本。
13、说明书附图
14、图1为本发明的侧视结构示意图。
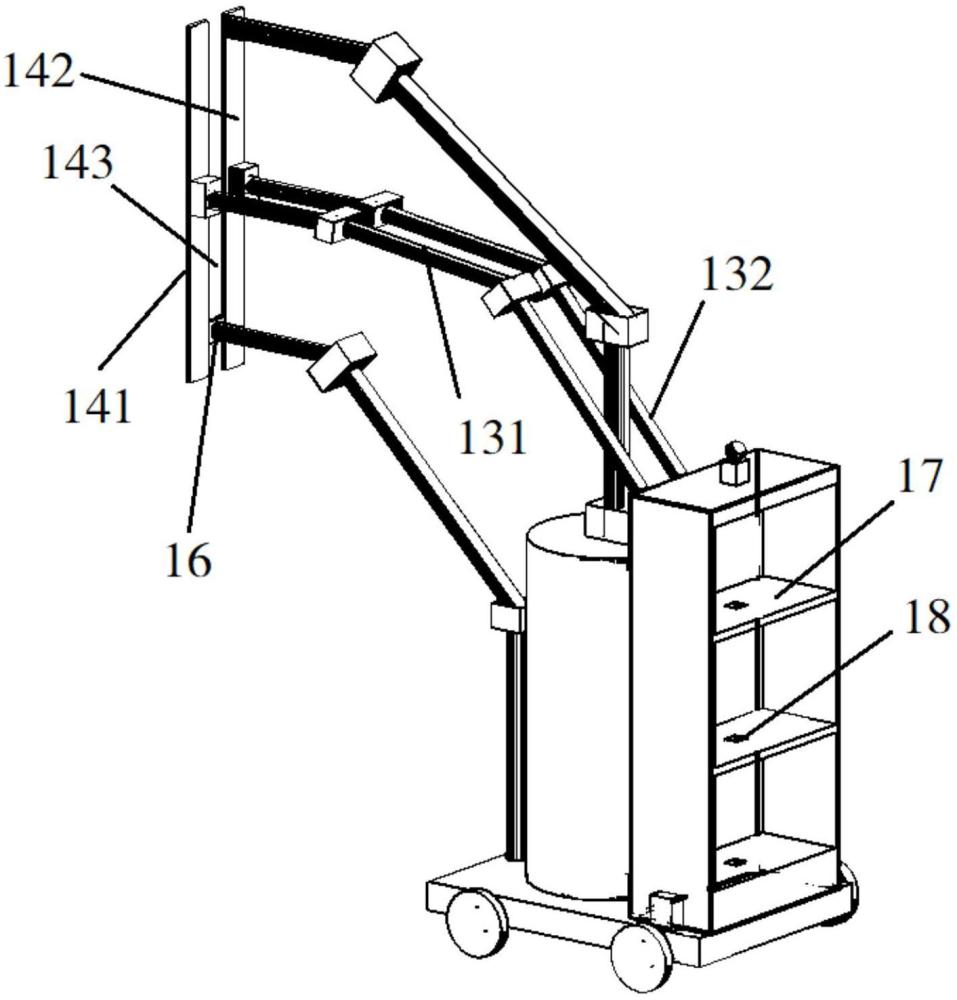
15、图2为本发明的立体结构示意图(省略出料管)。
16、图3为配管槽定位板与补槽刀的配合示意图。
17、图中:1、控制箱;2、浆料容器;3、压力泵;4、视觉传感器;5、底座;6、行走轮;7、第三机械臂;8、喷浆管;9、接头;10、出料管;11、舵机;12、卡座;13、第一机械臂;131、第一机械臂a;132、第一机械臂b;14、配管槽定位板;141、配管槽定位板a;142、配管槽定位板b;143、间隙;15、第二机械臂;16、补槽刀;17、隔板;18、走线孔;19、墙面;20、配管槽。
技术特征:
1.一种二次结构自动补槽机器人,其特征为:包括机器人本体,所述的机器人本体上设有2个第一机械臂,第一机械臂的末端分别连接有配管槽定位板,在2个第一机械臂之间的机器人本体上设有第二机械臂,所述的第二机械臂的末端连接有补槽刀,所述的补槽刀与2个配管槽定位板配合使用,所述的机器人本体上还固定设有浆料容器,所述的浆料容器连接有第三机械臂及出料管,所述的第三机械臂配置为对出料管末端的位置进行控制,所述的出料管与浆料容器连接并用以输出浆料至配管槽。
2.如权利要求1所述的一种二次结构自动补槽机器人,其特征为:所述的机器人本体包括底座、行走机构、控制机构,所述的底座下端设有行走机构,行走机构包括行走轮以及用以驱动行走轮移动的驱动电机,所述的底座上安装有用以检测机器人行走速度的速度传感器,所述的速度传感器与控制机构通过导线信号连接,控制机构配置为对行走机构进行控制,所述的底座的侧端分别安装有红外线传感器及距离传感器,所述的红外线传感器、距离传感器也通过导线与控制机构信号连接。
3.如权利要求2所述的一种二次结构自动补槽机器人,其特征为:所述的底座上端设有控制箱,所述的控制箱内设有相互电连接的控制机构及蓄电池,底座的上端还固定设有浆料容器,所述的第一机械臂、第二机械臂、第三机械臂分别通过导线与控制机构电连接。
4.如权利要求3所述的一种二次结构自动补槽机器人,其特征为:所述的浆料容器为浆料压力罐或者浆料容器顶端连接有压力泵,所述的压力泵的输入端与浆料容器内部连接,输出端通过柔性出料管连接有喷浆管,所述的喷浆管连接于第三机械臂的末端,所述的出料管通过卡座与第三机械臂连接,所述的第三机械臂配置为对喷浆管的位置进行控制。
5.如权利要求4所述的一种二次结构自动补槽机器人,其特征为:所述的控制箱顶端设有视觉传感器,所述的视觉传感器通过导线与控制机构信号连接。
6.如权利要求5所述的一种二次结构自动补槽机器人,其特征为:所述的机器人本体还配置有控制端,所述的控制端与控制机构通过无线信号连接。
7.如权利要求6所述的一种二次结构自动补槽机器人,其特征为:所述的控制端为智能手机。
8.如权利要求7所述的一种二次结构自动补槽机器人,其特征为:所述的控制机构包括用以控制机器人行走的第一控制单元、用以对第一至第三机械臂进行控制的第二控制单元、用以对传感器数据进行处理并对机器人动作路径进行规划的第三控制单元,所述的控制盒通过隔板分成3个腔室,第一至第三控制单元分别设置于各自的腔室内。
技术总结
一种二次结构自动补槽机器人,属于机器人技术领域,包括机器人本体,所述的机器人本体上设有2个第一机械臂,第一机械臂的末端分别连接有配管槽定位板,在2个第一机械臂之间的机器人本体上设有第二机械臂,所述的第二机械臂的末端连接有补槽刀,所述的补槽刀与2个配管槽定位板配合使用,所述的机器人本体上还固定设有浆料容器,所述的浆料容器连接有第三机械臂及出料管,所述的第三机械臂配置为对出料管末端的位置进行控制,所述的出料管与浆料容器连接并用以输出浆料至配管槽。本发明公开了一种二次结构自动补槽机器人,该机器人能够完成配管槽的自动补槽,可显著提高施工高效率、保证施工质量,克服了人工补槽效率低、施工质量差的缺陷。
技术研发人员:王宇,包妍,崔黎明,成腾,张志龙,王黎明,王超,南麟飞,王浩冬,孙世斌,李霄熠
受保护的技术使用者:中建中新建设工程有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!