一种钢塔结构的安装定位方法及定位设备与流程
本发明属于钢塔安装,具体涉及一种钢塔结构的安装定位方法及定位设备。
背景技术:
1、钢塔结构通常指的是由钢材构成的塔式建筑物或构筑物,它们因其高强度和耐久性而被广泛应用于通信、广播电视发射、观测等领域。
2、现有技术存在的问题:
3、钢塔结构由于其独特的结构特性和施工要求,对预拼装的精度和稳定性有很高的要求,然而,现有的预拼装技术往往只考虑了基本的几何尺寸匹配,而忽视了更影响结构稳定性和施工精度的因素,如装配面形心重合和扭转偏差,因此,开发一种能够综合考虑这些因素的拼装装置与拼装方法是必要的。
技术实现思路
1、本发明的目的是提供一种钢塔结构的安装定位方法及定位设备,能够实现钢塔结构拼装结构的精确定位,提供施工质量。
2、本发明采取的技术方案具体如下:
3、一种钢塔结构的安装定位方法,包括如下步骤:
4、s1:首先在钢塔结构两端对应位置标记,将两个分别搭载红外装置与定位装置的两个爬行机器人分别爬行至钢塔结构两端的标记位置;
5、s2:通过两个爬行机器人前端设置的摄像头或红外定位传感器中任一种,定位至钢塔结构两端的标记位置:
6、s3:两个爬行机器人分别将升降调节装置底部的磁吸盘磁吸定位至钢塔结构两端的标记位置;
7、s4:通过运行电机一,使外杆在磁吸盘上弯曲,使外杆垂直于地面,且两侧的红外装置的红外激光传感器垂直于反射面;
8、s5:启动红外装置内部的红外激光传感器,通过反射面反射至红外激光传感器与光电探测器;
9、s6:通过红外激光传感器接收红外线反射时间用于计算红外装置与定位装置之间的距离;
10、通过光电探测器接收红外线,并依据红外线强度,用于测算红外激光传感器发射红外线照射在反射面上的对应区域;
11、s7:于s6中光电探测器接收红外线强度,对应反射面表面的a1、a2、a3、a4及a5区域,通过吊装钢塔结构的吊臂调整两端钢塔结构位置,直至光电探测器接收红外强度区域对应a1区域;
12、通过吊装钢塔结构的吊臂依据红外激光传感器测算距离调整两端钢塔结构位置;
13、s8:通过吊装钢塔结构的吊臂拼装两端钢塔结构,或位于两端钢塔结构之间加装钢塔结构;
14、s9:焊接或通过螺栓螺母组件安装相邻的钢塔结构端部,安装完成。
15、一种钢塔结构的安装定位设备,包括:
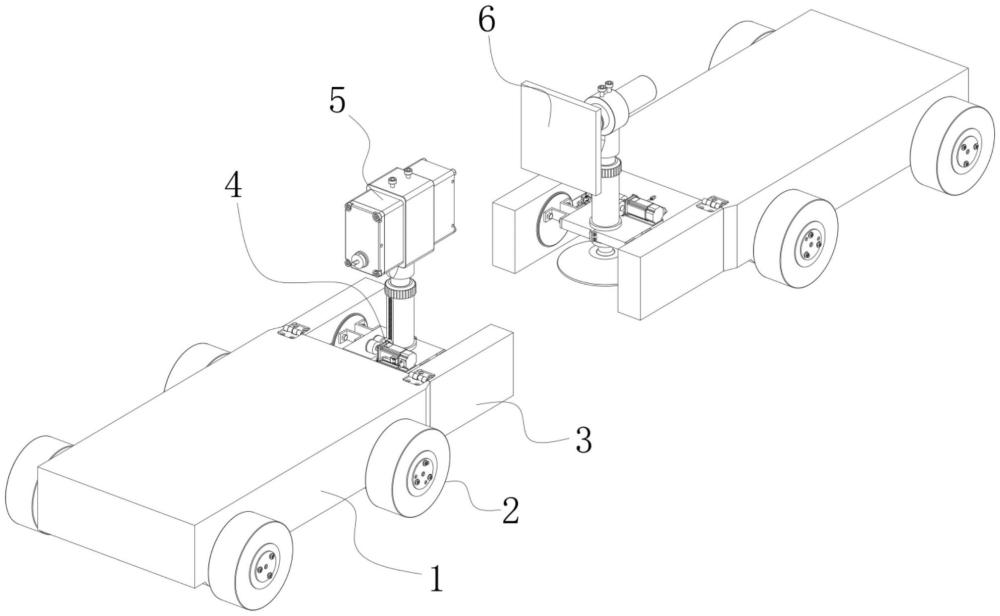
16、至少两个爬行机器人,以及分别活动安装在两个爬行机器人相对端的红外装置与定位装置;
17、其中,所述红外装置与定位装置均分别通过升降调节装置活动安装在两个爬行机器人的端部;
18、所述红外装置内部分别设有对应定位装置的红外激光传感器与光电探测器;
19、所述爬行机器人底部均转动安装有不少于四个磁性轮,所述磁性轮与钢塔结构表面转动,且磁吸连接。
20、所述爬行机器人端部两侧设有相对的前端支架,所述前端支架之间通过设置的连杆用于固定安装升降调节装置的两侧。
21、两侧所述前端支架相对侧转动安装有侧齿转盘,所述前端支架内部安装有电机二,所述电机二通过输出端套接的齿轮四与侧齿转盘侧面边部啮合传动连接。
22、所述侧齿转盘外侧均匀设置有滚珠,所述侧齿转盘通过滚珠与前端支架转动连接,所述侧齿转盘外侧还设有凸起的环状结构用于转动卡接在前端支架内部。
23、所述连杆通过螺栓固定安装在侧齿转盘端面,所述连杆另一端通过螺栓固定安装在拼装架两侧。
24、两个所述拼装架中部竖直滑动安装有外杆,所述外杆一侧设有侧齿条;
25、所述拼装架上表面还通过螺栓固定安装有电机一,所述电机一端部分别通过设置的齿轮一、齿轮二、齿轮三与侧齿条啮合传动连接。
26、所述外杆内部活动插接有内杆,所述内杆外侧通过套接的螺套与外杆顶部螺纹安装。
27、所述外杆底部通过固定的万向球与磁吸盘转动安装,所述磁吸盘底部嵌设有与钢塔结构外表面磁吸连接的磁铁。
28、所述定位装置朝向红外装置一端设置有反射面,所述反射面表面自内而外依次设置有a1、a2、a3、a4及a5区域,所述a2、a3、a4及a5区域表面均设置有颗粒状的凸起,所述凸起分别在a2、a3、a4及a5区域上外表面与反射面之间的夹角α逐渐减小;
29、所述a1区域表面与反射面表面重合或平行。
30、本发明取得的技术效果为:
31、本发明,通过爬行机器人底部的磁性轮磁吸在钢塔结构表面,并通过爬行机器人内部的电机传动并带动磁性轮转动,并通过磁吸方式吸附在钢塔结构表面爬行,可方便爬行机器人的安装,从而可减少人员通过吊臂观察。
32、本发明,通过磁吸盘可实现对升降调节装置上红外装置与定位装置的定位,确保在使用过程中发生的位移偏差。
33、本发明,通过红外光照射在a1、a2、a3、a4及a5区域所反射回红外光强度,通过光电探测器测算并读取红外光强度,用于判断红外装置与定位装置的位置是否对应。
技术特征:
1.一种钢塔结构的安装定位方法,其特征在于,包括如下步骤:
2.使用如权利要求1钢塔结构的安装定位方法的一种钢塔结构的安装定位设备,其特征在于:包括:
3.根据权利要求2所述的一种钢塔结构的安装定位设备,其特征在于:所述爬行机器人(1)端部两侧设有相对的前端支架(3),所述前端支架(3)之间通过设置的连杆用于固定安装升降调节装置(4)的两侧。
4.根据权利要求3所述的一种钢塔结构的安装定位设备,其特征在于:两侧所述前端支架(3)相对侧转动安装有侧齿转盘(47),所述前端支架(3)内部安装有电机二(48),所述电机二(48)通过输出端套接的齿轮四(481)与侧齿转盘(47)侧面边部啮合传动连接。
5.根据权利要求4所述的一种钢塔结构的安装定位设备,其特征在于:所述侧齿转盘(47)外侧均匀设置有滚珠(471),所述侧齿转盘(47)通过滚珠(471)与前端支架(3)转动连接,所述侧齿转盘(47)外侧还设有凸起的环状结构用于转动卡接在前端支架(3)内部。
6.根据权利要求4所述的一种钢塔结构的安装定位设备,其特征在于:所述连杆通过螺栓固定安装在侧齿转盘(47)端面,所述连杆另一端通过螺栓固定安装在拼装架(41)两侧。
7.根据权利要求2所述的一种钢塔结构的安装定位设备,其特征在于:两个所述拼装架(41)中部竖直滑动安装有外杆(43),所述外杆(43)一侧设有侧齿条(431);
8.根据权利要求7所述的一种钢塔结构的安装定位设备,其特征在于:所述外杆(43)内部活动插接有内杆(45),所述内杆(45)外侧通过套接的螺套(46)与外杆(43)顶部螺纹安装。
9.根据权利要求7所述的一种钢塔结构的安装定位设备,其特征在于:所述外杆(43)底部通过固定的万向球与磁吸盘(44)转动安装,所述磁吸盘(44)底部嵌设有与钢塔结构外表面磁吸连接的磁铁(441)。
10.根据权利要求2所述的一种钢塔结构的安装定位设备,其特征在于:所述定位装置(6)朝向红外装置(5)一端设置有反射面(61),所述反射面(61)表面自内而外依次设置有a1、a2、a3、a4及a5区域,所述a2、a3、a4及a5区域表面均设置有颗粒状的凸起,所述凸起分别在a2、a3、a4及a5区域上外表面与反射面(61)之间的夹角α逐渐减小;
技术总结
本发明属于钢塔安装技术领域,具体涉及一种钢塔结构的安装定位方法及定位设备,包括至少两个爬行机器人,以及分别活动安装在两个爬行机器人相对端的红外装置与定位装置,所述红外装置与定位装置均分别通过升降调节装置活动安装在两个爬行机器人的端部;所述红外装置内部分别设有对应定位装置的红外激光传感器与光电探测器;所述爬行机器人底部均转动安装有不少于四个磁性轮,所述磁性轮与钢塔结构表面转动,且磁吸连接。本发明,能够实现钢塔结构拼装结构的精确定位,提供施工质量。
技术研发人员:张晖,宋超,林海峰,阮静,徐永明,田伟,沙仁智
受保护的技术使用者:中铁建大桥工程局集团第一工程有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!