一种双轮驱动钢筋捆扎机器人
本发明涉及建筑施工领域,具体为一种双轮驱动钢筋捆扎机器人。
背景技术:
1、目前市面上存在大量的机器人,例如agv运输机器人,巡检机器人等等。但在建筑施工领域面对复杂的地形,特别是大量需要自动化进行捆扎的钢筋网,这些机器人的作用是十分有限的。虽然针对该工作区域目前已有履带式机器人,但履带式机器人前后左右都具有较大尺寸,特别的在钢筋网格上移动时会导致其面对障碍物的通过率降低。除此之外,面对不同的建筑需要,钢筋网格的尺寸大小不同,在面对较大尺寸的钢筋网格进行自动化作业时,履带式机器人会频繁陷入到钢筋网格中,这大大降低了其工作效率。另外,由于履带式机器人由于其自身的机构设计,其往往都采用单机械臂设计,不利于提高工作效率。
技术实现思路
1、本发明的目的在于提供一种双轮驱动钢筋捆扎机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种双轮驱动钢筋捆扎机器人,包括车身主体,所述车身主体上设置双轮驱动系统、动量轮平衡系统、机械臂系统和视觉导航系统;所述双轮驱动系统包括前后设置的前槽轮和后槽轮,所述前槽轮和后槽轮均通过环形轮槽与钢筋相配合;所述动量轮平衡系统实现机器人的左右平衡;所述机械臂系统实现对钢筋的捆扎工作;所述视觉导航系统实时拍摄钢筋网格相关情况。
4、进一步地,所述动量轮平衡系统包括动量轮、动量轮驱动电机、动量轮安装架、动量轮保护壳和姿态传感器,其中动量轮安装架安装在车身主体上,动量轮、动量轮驱动电机均安装于动量轮安装架上,动量轮驱动电机驱动动量轮旋转。
5、进一步地,所述视觉导航系统包括两组分别设置于车身主体前后两侧的导航相机。
6、进一步地,所述车身主体的左右两侧对称设置机械臂系统。
7、进一步地,所述机械臂系统包括关节总成和夹爪机械手,所述关节总成一端与身主体连接,另一端与夹爪机械手连接,所述夹爪机械手抓取钢筋,所述关节总成实现夹爪机械手的多轴移动和旋转。
8、进一步地,所述关节总成包括第一肩部关节、第二肩部关节、大臂关节、肘关节、小臂关节、腕关节、末端关节,所述第一肩部关节与车身主体连接,所述末端关节与夹爪机械手连接。
9、进一步地,所述机械臂系统还包括设置于夹爪机械手上的定位相机。
10、进一步地,当机械人需要跨越钢筋时,左右两侧的机械臂系统将车身主体撑起并将其移动到相邻钢筋上,然后放下车身主体,以此完成跨越钢筋操作。
11、进一步地,所述机器人的工作方法包括:由姿态传感器检测并向主控模块传递当前机器人的姿态信息,若发现存在倾斜角则传递给动量轮平衡系统和机械臂系统;
12、根据姿态角度信息,动量轮驱动电机驱动动量轮旋转,同时位于倾斜角相反一侧的机械臂系统缓慢向外伸长;
13、当机器人逐渐平衡后机械臂系统回归到左右对称位置,且动量轮转速逐渐降低;
14、只需使动量轮驱动电机驱动动量轮的角加速度满足下式即可保证机器人的平衡:
15、
16、式中,m1表示机械臂系统的质量,m2表示动量轮的质量,r表示动量轮的半径,θ2博士左机械臂所受重力在进行力分解后的夹角,θ1代表右机械臂所受重力在进行力分解后的夹角,g代表重力加速度,l表示机械臂系统质心到机器人与钢筋网支撑点之间的距离,δl表示机械臂系统的伸长量,δω代表角速度的顺时变化量,δt代表时间变化量。
17、进一步地,所述机器人的工作方法还包括:当机械臂系统的定位相机发现需捆扎目标点时机械臂系统不再响应姿态角度信息,此时机械臂系统通过定位相机的信息对钢筋交叉点进行捆扎作业。
18、与现有技术相比,本发明的有益效果是:
19、1)采用双轮驱动系统只需要一个动量轮来保证机器人左右平衡,前后平衡由前后槽轮提供,极大的减少了整个系统的能耗;
20、2)采用双轮驱动系统能够保证机器人不管面对多大或多小尺寸的钢筋网格时都能行走在一根钢筋上,该系统的设计大大降低了机器人陷入钢筋网格的情况发生概率;
21、3)本发明可以实现机器人在钢筋网格上的自稳定,使机器人在钢筋网格上具有较强的稳定性;
22、4)左右对称机械臂设计具有功能复用性质,当未发现困扎点可通过控制左右对称机械臂的伸缩量并利用其自身重力来辅助完成平衡,该设计进一步降低了能源的消耗,增加了机器人的续航;
23、5)另外左右对称双机械臂利用作用力与反作用力将机器人本体支持起来帮助机器人跨越钢筋,本发明将机械臂功能利用最大化,极大简化了机器人的结构;
24、6)双轮驱动系统的设计大幅度降低了机器人横向的硬性尺寸,由于时前后双槽论设计,横向尺寸压缩到最小化,且横向尺寸可以通过收缩机械臂进一步减小,使得机器人在遇到障碍物时的通过率大大增加。
技术特征:
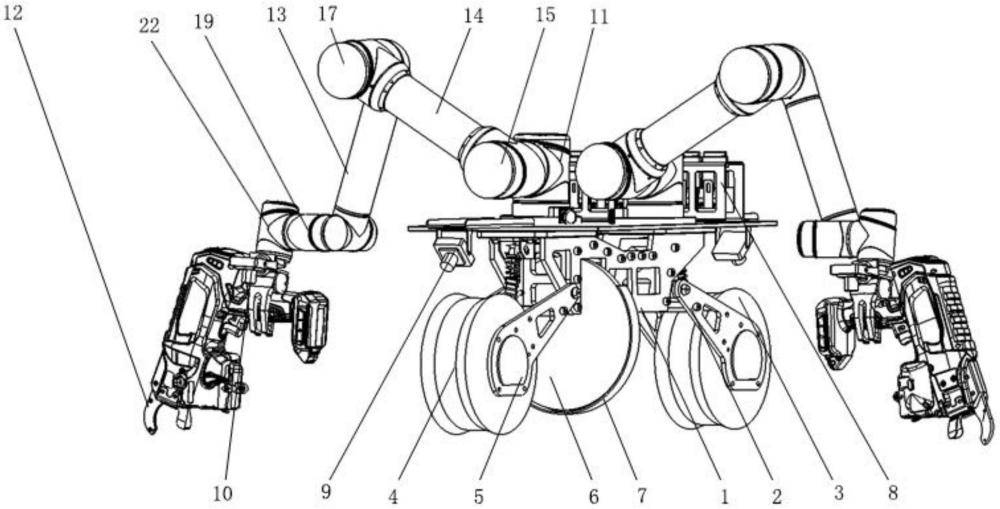
1.一种双轮驱动钢筋捆扎机器人,其特征在于,包括车身主体(1),所述车身主体(2)上设置双轮驱动系统、动量轮平衡系统、机械臂系统和视觉导航系统;所述双轮驱动系统包括前后设置的前槽轮(3)和后槽轮(4),所述前槽轮(3)和后槽轮(4)均通过环形轮槽与钢筋相配合;所述动量轮平衡系统实现机器人的左右平衡;所述机械臂系统实现对钢筋的捆扎工作;所述视觉导航系统实时拍摄钢筋网格相关情况。
2.根据权利要求1所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述动量轮平衡系统包括动量轮(6)、动量轮驱动电机(20)、动量轮安装架(21)、动量轮保护壳(7)和姿态传感器,其中动量轮安装架(21)安装在车身主体(1)上,动量轮(6)、动量轮驱动电机(20)均安装于动量轮安装架(21)上,动量轮驱动电机(20)驱动动量轮(6)旋转。
3.根据权利要求1所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述视觉导航系统包括两组分别设置于车身主体(1)前后两侧的导航相机(9)。
4.根据权利要求1所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述车身主体的左右两侧对称设置机械臂系统。
5.根据权利要求1所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述机械臂系统包括关节总成和夹爪机械手(12),所述关节总成一端与身主体(1)连接,另一端与夹爪机械手(12)连接,所述夹爪机械手(12)抓取钢筋,所述关节总成实现夹爪机械手的多轴移动和旋转。
6.根据权利要求5所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述关节总成包括第一肩部关节(11)、第二肩部关节(15)、大臂关节(14)、肘关节(17)、小臂关节(13)、腕关节(19)、末端关节(22),所述第一肩部关节(11)与车身主体(1)连接,所述末端关节(22)与夹爪机械手(12)连接。
7.根据权利要求5所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述机械臂系统还包括设置于夹爪机械手(12)上的定位相机(10)。
8.根据权利要求5所述的一种双轮驱动钢筋捆扎机器人,其特征在于,当机械人需要跨越钢筋时,左右两侧的机械臂系统将车身主体(1)撑起并将其移动到相邻钢筋上,然后放下车身主体(1),以此完成跨越钢筋操作。
9.根据权利要求1所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述机器人的工作方法包括:由姿态传感器检测并向主控模块传递当前机器人的姿态信息,若发现存在倾斜角则传递给动量轮平衡系统和机械臂系统;
10.根据权利要求9所述的一种双轮驱动钢筋捆扎机器人,其特征在于,所述机器人的工作方法还包括:当机械臂系统的定位相机(10)发现需捆扎目标点时机械臂系统不再响应姿态角度信息,此时机械臂系统通过定位相机的信息对钢筋交叉点进行捆扎作业。
技术总结
本发明属于建筑施工领域,公开了一种双轮驱动钢筋捆扎机器人,包括车身主体,所述车身主体上设置双轮驱动系统、动量轮平衡系统、机械臂系统和视觉导航系统;所述双轮驱动系统包括前后设置的前槽轮和后槽轮,所述前槽轮和后槽轮均通过环形轮槽与钢筋相配合;所述动量轮平衡系统实现机器人的左右平衡;所述机械臂系统实现对钢筋的捆扎工作;所述视觉导航系统实时拍摄钢筋网格相关情况。本发明采用双轮驱动系统只需要一个动量轮来保证机器人左右平衡,前后平衡由前后槽轮提供,极大的减少了整个系统的能耗。
技术研发人员:佘翊妮,李昌鸿,荀一,张利
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!