一种基于多传感器融合的建筑腻子刮墙机器人及其控制方法与流程
本发明涉及建筑设备,尤其涉及一种基于多传感器融合的建筑腻子刮墙机器人及其控制方法。
背景技术:
1、随着城市化进程的加快,建筑行业对高效、高质量施工的需求日益增加,特别是在新房建设和旧房翻新领域,墙面处理是一个重要的环节,建筑腻子刮墙是墙面处理中的一项关键工艺,主要目的是对墙面进行平整处理,为后续的装饰工作打下良好的基础,传统的腻子刮墙工作通常由人工完成。
2、但上述现有技术中,通过工人进行腻子刮墙效率较低,工人劳动强度大,且难以精确控制腻子的厚度和均匀度,无法确保墙面平整光滑。
技术实现思路
1、本发明的目的在于提供一种基于多传感器融合的建筑腻子刮墙机器人及其控制方法,旨在解决现有技术中,通过工人进行腻子刮墙效率较低,工人劳动强度大,且难以精确控制腻子的厚度和均匀度,无法确保墙面平整光滑的技术问题。
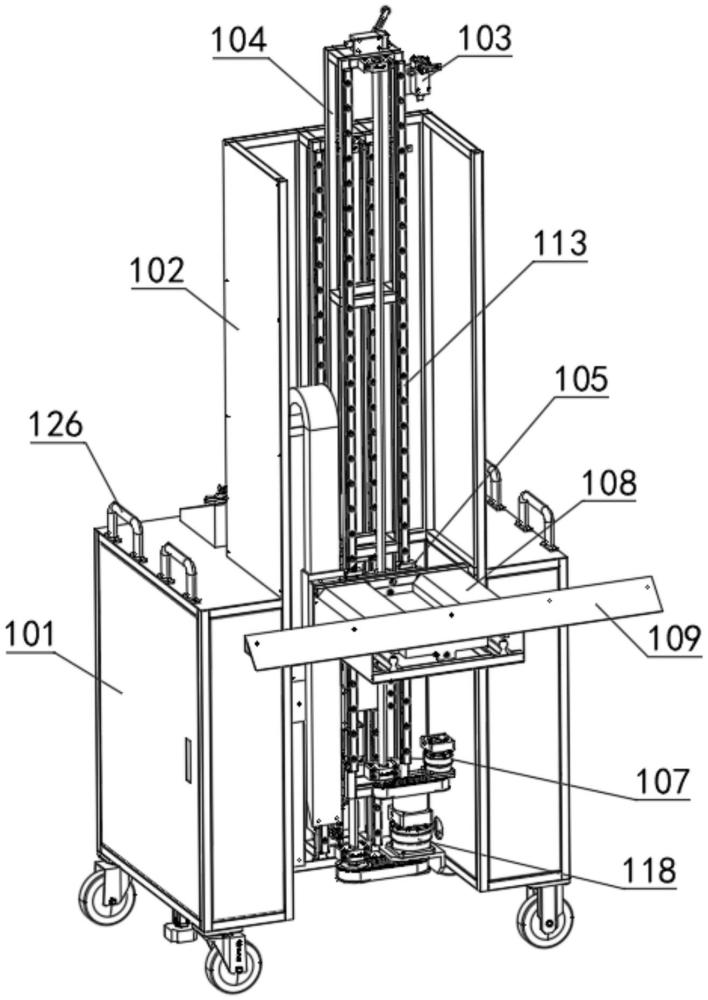
2、为实现上述目的,本发明采用的一种基于多传感器融合的建筑腻子刮墙机器人,包括机体、防护罩、多个传感器、第一安装架、第一升降座、第一丝杆、第一驱动件、盒体、刮板、两组第一导向件、移动组件、升降组件和控制组件,所述防护罩设置于所述机体的上表面,所述升降组件设置于所述防护罩的内侧,所述第一安装架与所述升降组件固定连接,所述第一丝杆贯穿所述第一升降座,并与所述第一升降座螺纹配合,所述第一丝杆的两端分别与所述第一安装架转动连接,所述第一驱动件用于驱动所述第一丝杆转动,所述盒体固定连接于所述第一升降座的一侧,所述移动组件设置于所述盒体的内部,所述刮板与所述移动组件固定连接,两组所述第一导向件对称设置于所述第一升降座的一侧,所述控制组件设置于所述机体的上表面,多个所述传感器用于对作业环境进行全方位感知。
3、其中,所述移动组件包括气缸、移动板和两组滑动件,两组所述滑动件分别与所述刮板固定连接,所述移动板的两端分别与两组所述滑动件固定连接,所述气缸设置于所述盒体的内部,所述气缸的输出端与所述移动板固定连接。
4、其中,每组所述第一导向件包括第一滑轨和第一滑套,所述第一滑轨与所述第一安装架固定连接,所述第一滑套的一侧与所述第一升降座固定连接,所述第一滑套的另一侧与所述第一滑轨滑动连接。
5、其中,所述升降组件包括第二安装架、第二升降座、第二丝杆、第二驱动件和两组第二导向件,所述第二安装架与所述防护罩固定连接,所述第二升降座与所述第一安装架固定连接,所述第二丝杆贯穿所述第二升降座,并与所述第二升降座螺纹配合,所述第二丝杆的两端分别与所述第二安装架转动连接,所述第二驱动件用于驱动所述第二丝杆转动,两组所述第二导向件对称设置于所述第二升降座的一侧。
6、其中,每组所述第二导向件包括第二滑轨和第二滑套,所述第二滑轨与所述第二安装架固定连接,所述第二滑套的一侧与所述第二升降座固定连接,所述第二滑套的另一侧与所述第二滑轨滑动连接。
7、其中,所述控制组件包括操控台和操作屏,所述操控台设置于所述机体的上表面,所述操作屏设置于所述操控台的上表面。
8、其中,所述控制组件还包括启动按钮、暂停按钮和急停按钮,所述启动按钮、所述暂停按钮和所述急停按钮均设置于所述操控台的上表面。
9、其中,所述基于多传感器融合的建筑腻子刮墙机器人还包括多个把手,多个所述把手均与所述机体固定连接,并分别位于所述机体的上表面。
10、本发明还提供一种基于多传感器融合的建筑腻子刮墙机器人的控制方法,应用于如上述所述的基于多传感器融合的建筑腻子刮墙机器人,包括如下步骤:
11、首先通过多个所述传感器用于对作业环境进行全方位感知;
12、然后通过所述移动组件带动所述刮板水平移动,使得所述刮板向墙面靠近;
13、随后将调好的腻子放置在所述刮板上;
14、之后通过所述第一升降座带动带动所述刮板向上移动,从而将腻子刮涂在墙面上;
15、当所述第一升降座到达最高点时,所述升降组件带动第一安装架向上移动,从而使得所述刮板继续向上移动,直至到达墙面的最高点。
16、本发明的一种基于多传感器融合的建筑腻子刮墙机器人,在具体进行使用时,通过多个所述传感器用于对作业环境进行全方位感知,然后通过所述移动组件带动所述刮板移动,使得所述刮板向墙面移动,然后将腻子放置在所述刮板上,然后通过所述第一驱动件带动所述第一丝杆转动,使得所述第一升降座向上移动,所述第一升降座带动所述盒体向上移动,从而带动所述刮板向上移动,从而将腻子刮涂在墙面上,当所述第一升降座上升到最高点时,通过所述升降组件带动所述第一安装架向上移动,所述第一安装架带动所述第一升降座向上移动,所述第一升降座带动所述刮板继续向上移动,从而继续对墙面刮涂腻子,直至到达墙面的最高点,以此方法能够有效解决现有技术中,通过工人进行腻子刮墙效率较低,工人劳动强度大,且难以精确控制腻子的厚度和均匀度,无法确保墙面平整光滑的问题。
技术特征:
1.一种基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
2.如权利要求1所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
3.如权利要求2所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
4.如权利要求3所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
5.如权利要求4所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
6.如权利要求5所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
7.如权利要求6所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
8.如权利要求7所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,
9.一种基于多传感器融合的建筑腻子刮墙机器人的控制方法,应用于如权利要求8所述的基于多传感器融合的建筑腻子刮墙机器人,其特征在于,包括如下步骤:
技术总结
本发明涉及建筑设备技术领域,具体公开一种基于多传感器融合的建筑腻子刮墙机器人及其控制方法,包括机体、防护罩、多个传感器、第一安装架、第一升降座、第一丝杆、第一驱动件、盒体、刮板、两组第一导向件、移动组件、升降组件和控制组件,第一安装架与升降组件固定连接,第一丝杆贯穿第一升降座,第一驱动件用于驱动第一丝杆转动,移动组件设置于盒体的内部,刮板与移动组件固定连接,控制组件设置于机体的上表面,多个传感器用于对作业环境进行全方位感知,通过使用本发明替代人工进行腻子刮墙,提升了工作效率,减少了对人力的依赖,同时能精确控制腻子的厚度和均匀度,确保墙面平整光滑。
技术研发人员:许盈辰,胡涛,许有
受保护的技术使用者:苏州毕诚智造科技有限公司
技术研发日:
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!