一种防滑型轮足式钢筋捆扎机器人的制作方法
本技术属于钢筋捆扎机器人,具体涉及一种防滑型轮足式钢筋捆扎机器人。
背景技术:
1、建筑工程中,为了提高钢筋的捆扎效率、降低工人的劳动强度和作业风险,有使用机器人来代替传统人工捆扎工作。由于钢筋上捆扎结点凸出的形状、高度不同,当机器人行走在凹凸不平的捆扎结点上时容易出现打滑、倒退的问题,因此现有技术有在行走结构上设置防滑件来避免这个问题,如授权公告号cn215443176u提供一种自行式钢筋捆扎机器人,该机器人的车轮包有橡胶,以便机器人行走。
2、实际中,由于机器人上安装有捆扎机、丝盘等结构,机器人的整体重量较大,这反而增大了防滑件与钢筋之间的阻力,进而增大了机器人行走过程中的阻力。而现有的机器人的动力装置所能提供的动力不足(两驱),机器人没有足够的动力克服行走过程中的阻力来跨过捆扎结点,其仍会出现倒退问题。
技术实现思路
1、本实用新型的目的在于克服现有技术中的不足,提供一种防滑型轮足式钢筋捆扎机器人。
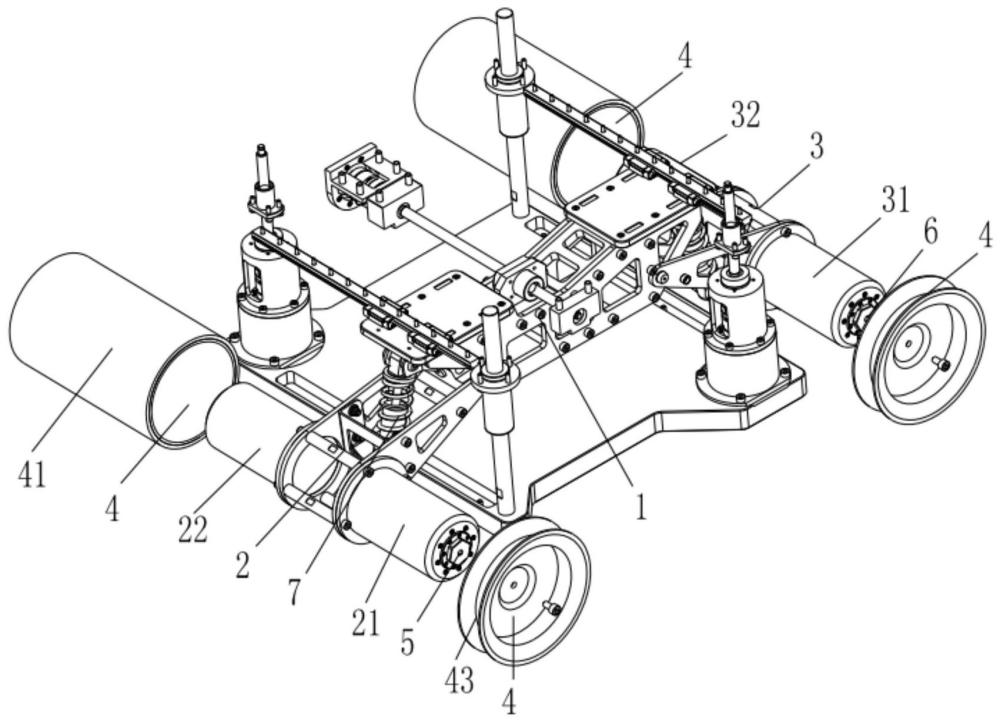
2、为实现以上目的,本实用新型公开一种防滑型轮足式钢筋捆扎机器人,包括车身、设于车身前端两侧的第一车轴和第二车轴、设于车身后端两侧的第三车轴和第四车轴,每个车轴均可转动地连接有行进轮;
3、位于前端的至少一个行进轮和后端的至少一个行进轮设有防滑件;
4、还包括控制装置以及与所述控制装置电连接的驱动装置,每个行进轮均由一个所述驱动装置驱动。
5、优选的,位于前端的两个行进轮和后端的两个行进轮均设有防滑件。
6、优选的,位于所述钢筋捆扎机器人行进方向一侧的两个行进轮的轮面设有限位槽形成槽轮。
7、进一步优选的,所述限位槽的侧壁从槽口到槽底逐渐收拢。
8、进一步优选的,所述槽轮的一侧设有连接凸台,所述连接凸台与对应的车轴连接。
9、优选的,所述驱动装置设于对应的车轴内。
10、优选的,所述第一车轴和/或第二车轴和/或第三车轴和/或第四车轴的两端贯通。
11、优选的,位于所述钢筋捆扎机器人行进方向一侧的两个行进轮呈直筒状形成宽轮,所述宽轮内设有连接板,所述连接板与对应的车轴连接。
12、优选的,所述防滑件可拆卸连接或注塑于所述行进轮的轮面。
13、优选的,所述防滑件套设于所述行进轮上。
14、与现有技术相比,本实用新型的有益效果为:位于前端的至少一个行进轮和后端的至少一个行进轮设有防滑件,增大了前端车轮和后端车轮与钢筋的摩擦力,当机器人行走至捆扎结点上时不易出现打滑、倒退的问题,提高机器人行走稳定性。每个驱动装置单独为一个行进轮提供动力,使得每个行进轮能获得足够大的动力来跨过捆扎结点,避免了因设置防滑件导致行进轮与钢筋之间阻力过大,进而导致机器人行进阻力大,机器人不能提供足够动力来支持行进轮跨过捆扎结点的问题。
技术特征:
1.一种防滑型轮足式钢筋捆扎机器人,包括车身、设于车身前端两侧的第一车轴和第二车轴、设于车身后端两侧的第三车轴和第四车轴,每个车轴均可转动地连接有行进轮,其特征在于:
2.根据权利要求1所述的防滑型轮足式钢筋捆扎机器人,其特征在于:位于前端的两个行进轮和后端的两个行进轮均设有防滑件。
3.根据权利要求1所述的防滑型轮足式钢筋捆扎机器人,其特征在于:位于所述钢筋捆扎机器人行进方向一侧的两个行进轮的轮面设有限位槽形成槽轮。
4.根据权利要求3所述的防滑型轮足式钢筋捆扎机器人,其特征在于:所述限位槽的侧壁从槽口到槽底逐渐收拢。
5.根据权利要求3所述的防滑型轮足式钢筋捆扎机器人,其特征在于:所述槽轮的一侧设有连接凸台,所述连接凸台与对应的车轴连接。
6.根据权利要求1所述的防滑型轮足式钢筋捆扎机器人,其特征在于:所述驱动装置设于对应的车轴内。
7.根据权利要求1所述的防滑型轮足式钢筋捆扎机器人,其特征在于:所述第一车轴和/或第二车轴和/或第三车轴和/或第四车轴的两端贯通。
8.根据权利要求1所述的防滑型轮足式钢筋捆扎机器人,其特征在于:位于所述钢筋捆扎机器人行进方向一侧的两个行进轮呈直筒状形成宽轮,所述宽轮内设有连接板,所述连接板与对应的车轴连接。
9.根据权利要求1-8任一项所述的防滑型轮足式钢筋捆扎机器人,其特征在于:所述防滑件可拆卸连接或注塑于所述行进轮的轮面。
10.根据权利要求1-8任一项所述的防滑型轮足式钢筋捆扎机器人,其特征在于:所述防滑件套设于所述行进轮上。
技术总结
一种防滑型轮足式钢筋捆扎机器人,包括车身、设于车身前端两侧的第一车轴和第二车轴、设于车身后端两侧的第三车轴和第四车轴,每个车轴均可转动地连接有行进轮,位于前端的至少一个行进轮和后端的至少一个行进轮设有防滑件;还包括控制装置以及与所述控制装置电连接的驱动装置,每个行进轮均由一个所述驱动装置驱动。与现有技术相比,本技术的钢筋捆扎机器人有能为每个行进轮提供足够大的动力跨越捆扎节点,避免打滑、倒退。
技术研发人员:王灵超,陈总,苏永宾
受保护的技术使用者:台州市新大陆电子科技有限公司
技术研发日:20240202
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!