一种基于手势控制的升降桌的制作方法
1.本实用新型涉及办公用具领域,尤其涉及一种基于手势控制的升降桌。
背景技术:
2.随着社会不断发展,上班族在桌椅上进行办公的时间不输于睡觉时间,长时间伏案工作无疑加重人的颈椎负担,上班族对于桌椅要求已经从单纯满足办公的要求向舒适健康办公转变,站坐交替办公逐渐受都市白领欢迎的一种办公模式,而传统的升降桌采用机械式结构操作升降,操作复杂且不够人工智能。
技术实现要素:
3.本实用新型目的在于克服上述现有技术存在的不足,而提供一种基于手势控制的升降桌。
4.为了解决上述技术问题,本实用新型的技术方案是:
5.一种基于手势控制的升降桌,包括桌体本体,所述桌体本体包括可升降的桌腿和安装于所述桌腿上的桌板,所述桌腿设有驱动所述桌腿动作实现所述桌板升降的驱动机构,所述桌体本体上设有控制器,所述控制器分别连接驱动机构和通过感应手势动作控制所述驱动机构动作的手势感应装置。
6.进一步的,所述手势感应装置包括超声波发声器和用以接收经过手势时反射的超声波信号的超声波检测器。
7.进一步的,所述控制器包括处理器,所述处理器对所述手势感应装置前的手势动作进行识别,通过所述控制器控制所述驱动机构带动所述桌腿作出升或降的动作。
8.进一步的,所述手势感应装置嵌入于所述桌板内或所述桌板侧边,所述手势感应装置与所述桌板上表面或侧面齐平。
9.进一步的,所述的手势感应装置的感应距离为10~30cm。
10.进一步的,所述桌体本体还包括连接所述控制器的第一设置按键;
11.所述第一设置按键用于对所述控制器输入控制所述驱动机构进行升动作的升指令。
12.进一步的,所述桌体本体还包括连接所述控制器的第二设置按键;
13.所述第二设置按键用于对所述控制器输入控制所述驱动机构进行降动作的降指令。
14.本实用新型还提供了一种升降桌的手势控制方法,包括:
15.计算超声波信号发射到经过用户手势反射被接收所需的时间;
16.根据所述时间确定用户的手势动作;
17.根据所述手势动作控制升降桌进行升降。
18.进一步的,所述确定用户的手势动作包括:
19.根据所述时间确定用户手势对应的三维坐标,将所述三维坐标与预设的手势动作
库中的标准手势的坐标进行匹配识别,从而确定用户所述手势动作。
20.进一步的,根据手势动作对所述升降桌输出对应的升指令或降指令,所述升指令和降指令用于驱动所述升降桌的驱动机构作出升动作或降动作,从而控制升降桌进行升降。
21.与现有技术相比,本实用新型通过计算超声波信号发射到经过手势反射所需的时间,识别用户的手势动作,通过手势动作控制升降桌进行升降,提升了智能升降桌的智能性。
附图说明
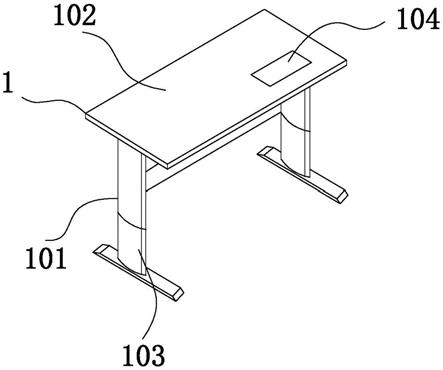
22.图1为本实用新型的构造示意图;
23.图2为本实用新型的原理流程图;
24.图中:1
‑
桌体本体,101
‑
桌腿,102
‑
桌板,103
‑
驱动机构,104
‑
手势感应装置。
具体实施方式
25.下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
26.参照图1所示,一种基于手势控制的升降桌,包括桌体本体1,所述桌体本体包括可升降的桌腿101和安装于所述桌腿上的桌板102,所述桌腿101设有驱动所述桌腿动作实现所述桌板升降的驱动机构103,所述桌体本体1上设有控制器,所述控制器分别连接驱动机构103和通过感应手势动作控制所述驱动机构动作的手势感应装置104,所述桌腿101具体可通过电机或液压控制升降。
27.其中,所述手势感应装置104包括超声波发声器和用以接收经过手势时反射的超声波信号的超声波检测器,此处手势感应装置可以选用超声波传感器,可以通过扬声器来发射超声波,在碰到用户手掌后声波会回弹,麦克风收集这些回声来感应用户的手势。
28.超声波传感器可以发射出高频率声音,普通人听不到这些声音,但机器可以通过计算用户的手在屏幕前移动的声音速度和频率,检测出该手势的三维位置。这种超声波非接触手势技术的概念与体感控制或其他相似的技术并无差异,但它与家具产品或办公产品结合或将有巨大的潜力。超声波传感器在25
‑
50khz的频率范围内工作,人和宠物都听不到这种声音而受到影响。
29.其中,所述控制器包括处理器,所述处理器对所述手势感应装置前的手势动作进行识别,通过所述控制器控制所述驱动机构带动所述桌腿作出升或降的动作。
30.工作原理如下:当用户用手在手势感应装置104前方划过时,超声波发声器发射的超声波被手阻挡而被反射一部分,当控制器通过超声波检测器检测到反射的超声波时,控制器控制驱动机构对桌板进行升或降。为了使得手势感应装置与升降桌更好的一体结合,所述手势感应装置104嵌入于所述桌板102内或所述桌板102侧边,所述手势感应装置104与所述桌板102上表面或侧面齐平。
31.为了进一步防止误触发升降桌进行升降,所述的手势感应装置104的感应距离为10~30cm,感应距离通过超声波传感器进行距离测量。
32.此外,所述桌体本体1还包括连接所述控制器的第一设置按键;
33.所述第一设置按键用于对所述控制器输入控制所述驱动机构进行升动作的升指
令。
34.此外,所述桌体本体1还包括连接所述控制器的第二设置按键;
35.所述第二设置按键用于对所述控制器输入控制所述驱动机构进行降动作的降指令。
36.所述第一设置按键和第二设置按键用于在伏案工作是直接通过机械操作方式控制升降桌进行升降。
37.图2为基于手势控制升降桌升降的方法流程图,本实施例可适用于对升降桌的高度进行隔空控制的情况,该方法可以由可感应手势动作的手势感应装置来执行,该装置被配置于通过电信号控制升降的桌体上。
38.步骤110、计算超声波信号发射到经过用户手势反射被接收所需的时间;
39.步骤120、根据所述时间确定用户手势对应的三维坐标,将所述三维坐标与预设的手势动作库中的标准手势的坐标进行匹配识别,从而确定用户所述手势动作;
40.步骤130、根据手势动作对所述升降桌输出对应的升指令或降指令,所述升指令和降指令用于驱动所述升降桌的驱动机构作出升动作或降动作,从而控制升降桌进行升降。
41.具体地,手势动作可以采用向上摆手和向下摆手的手势动作分别控制升降桌的升或降。
42.本实用新型通过计算超声波信号发射到经过手势反射所需的时间,识别用户的手势动作,通过手势动作控制升降桌进行升降,提升了智能升降桌的智能性。
43.以上所述仅为本实用新型的较佳实施例,凡依本实用新型申请专利范围所做的均等变化与修饰,皆应属本实用新型的涵盖范围。
技术特征:
1.一种基于手势控制的升降桌,其特征在于,包括桌体本体,所述桌体本体包括可升降的桌腿和安装于所述桌腿上的桌板,所述桌腿设有驱动所述桌腿动作实现所述桌板升降的驱动机构,所述桌体本体上设有控制器,所述控制器分别连接驱动机构和通过感应手势动作控制所述驱动机构动作的手势感应装置;所述桌体本体还包括连接所述控制器的第一设置按键;所述第一设置按键用于对所述控制器输入控制所述驱动机构进行升动作的升指令;所述桌体本体还包括连接所述控制器的第二设置按键;所述第二设置按键用于对所述控制器输入控制所述驱动机构进行降动作的降指令。2.根据权利要求1所述的基于手势控制的升降桌,其特征在于,所述手势感应装置包括超声波发声器和用以接收经过手势时反射的超声波信号的超声波检测器。3.根据权利要求1所述的基于手势控制的升降桌,其特征在于,所述控制器包括处理器,所述处理器对所述手势感应装置前的手势动作进行识别,通过所述控制器控制所述驱动机构带动所述桌腿作出升或降的动作。4.根据权利要求1所述的基于手势控制的升降桌,其特征在于,所述手势感应装置嵌入于所述桌板内或所述桌板侧边,所述手势感应装置与所述桌板上表面或侧面齐平。5.根据权利要求1所述的基于手势控制的升降桌,其特征在于,所述的手势感应装置的感应距离为10~30cm。
技术总结
本实用新型涉及一种基于手势控制的升降桌,包括桌体本体,所述桌体本体包括可升降的桌腿和安装于所述桌腿上的桌板,所述桌腿设有驱动所述桌腿动作实现所述桌板升降的驱动机构,所述桌体本体上设有控制器,所述控制器分别连接驱动机构和通过感应手势动作控制所述驱动机构动作的手势感应装置。本实用新型通过计算超声波信号发射到经过手势反射所需的时间,识别用户的手势动作,通过手势动作控制升降桌进行升降,提升了智能升降桌的智能性。提升了智能升降桌的智能性。提升了智能升降桌的智能性。
技术研发人员:魏罡 林玮
受保护的技术使用者:厦门乐范健康科技有限公司
技术研发日:2020.09.18
技术公布日:2021/11/5
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1