一种地墙两用型清洁机器人
1.本实用新型涉及机器人技术领域,尤其涉及一种地墙两用型清洁机器人。
背景技术:
2.随着科学技术的进步和社会发展,特别是受生活节奏的加快和工作压力的增大影响,人们希望更多地从繁琐的家庭日常清洁事务中解脱出来,这无疑是清洁机器人进入家庭的市场诉求。
3.目前,国内市场虽然拥有不少的清洁机器人品牌,而且在技术上越来越成熟,但是,具备核心研发能力的清洁机器人企业占比并不高,并且在墙面清洁方面更是鲜有产品问世。
4.常见的爬墙技术有:足式、车轮式和履带式。足式机器人能跨越较小的障碍,但移动速度慢;车轮式移动速度快、控制灵活,但维持一定的吸附力较困难机器人运行的稳定型和安全性相应降低;履带式对壁面适应性强,着地面积大,机器人运行平稳,但其不易转弯。这三种移动方式的跨越障碍能力都很弱。
5.经调研发现,基本上现有的扫地机器只能在地面上进行操作,例如专利cn210169969u提供的一种自动化扫地机器人防撞装置,主要解决了扫地机器人与其他物体的磕碰问题,但无法在墙面的清扫等诸多问题;专利cn209826575u提供的一种扫地机器人的清洁机构,虽然在普通扫地机器人的技术上进行了一些革新,但始终无法实现上墙问题,无法解决除开地面之外的清扫工作。
技术实现要素:
6.有鉴于此,本实用新型的实施例提供了一种地墙两用型清洁机器人。
7.本实用新型的实施例提供一种地墙两用型清洁机器人,包括壳体、驱动装置、真空吸附装置和吸尘装置,所述壳体底部下方设有向下延伸的吸附槽口和若干吸尘入口,所述吸附槽口位于所述壳体底部的中部,所述驱动装置包括两独立驱动轮和随动轮,两所述独立驱动轮安装于所述壳体底部,且两所述独立驱动轮并排设置,所述随动轮安装于所述壳体底部,且其与两所述独立驱动轮不在同一直线上,所述真空吸附装置安装在所述壳体内部,且其位于所述吸附槽口正上方,所述吸尘装置安装在所述壳体内部,且其通过管道分别与各所述吸尘入口连通。
8.进一步地,所述壳体为半椭球形,所述吸附槽口横截面为长条形或方形。
9.进一步地,所述吸附槽口上嵌设有吸附面板,所述吸附面板上均匀设有若干吸附孔。
10.进一步地,所述吸附孔的孔径为4
‑
6mm。
11.进一步地,所述吸附面板下表面四周设有用于地面或墙面保持紧密接触的围裙。
12.进一步地,所述壳体底部还设有两电动刷头,两所述电动刷头分别设置在所述吸附槽口左右两侧。
13.进一步地,所述壳体内部还设有用于感测所述清洁机器人与障碍物之间距离的红外传感器和用于所述清洁机器人清扫路线导航的陀螺仪。
14.本实用新型的实施例提供的技术方案带来的有益效果是:本实用新型的一种地墙两用型清洁机器人通过在所述壳体内设置所述真空吸附装置,从而通过所述真空吸附装置的吸附作用可使得所述清洁机器人对墙面的灰尘等垃圾进行清扫,以解决现有扫地机器人无法上墙的问题。
附图说明
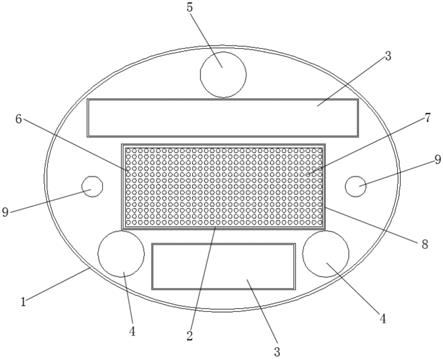
15.图1是本实用新型一种地墙两用型清洁机器人的仰视图。
16.图2是本实用新型一种地墙两用型清洁机器人的左视图。
17.图中:1
‑
壳体,2
‑
吸附槽口,3
‑
吸尘入口,4
‑
独立驱动轮,5
‑
随动轮,6
‑
吸附面板,7
‑
吸附孔,8
‑
围裙,9
‑
电动刷头。
具体实施方式
18.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
19.请参考图1和图2,本实用新型的实施例提供了一种地墙两用型清洁机器人,包括壳体1、驱动装置、真空吸附装置和吸尘装置,所述壳体1为半椭球形,且其底部下方设有向下延伸的吸附槽口2和若干吸尘入口3,所述吸附槽口2横截面为长条形或方形,且其位于所述壳体1底部的中部,本实施例中所述壳体1底部下方设有两所述吸尘入口3,且两所述吸尘入口3分别位于所述吸附槽口2前后方。
20.所述驱动装置包括两独立驱动轮4和随动轮5,两所述独立驱动轮4安装于所述壳体1底部,且两所述独立驱动轮4并排设置,所述随动轮5安装于所述壳体1底部,且其与两所述独立驱动轮4不在同一直线上。
21.所述真空吸附装置安装在所述壳体1内部,且其位于所述吸附槽口2正上方,所述吸附槽口2上嵌设有吸附面板6,所述吸附面板6上均匀设有若干吸附孔7,所述吸附孔7的孔径为4
‑
6mm,优选地,所述吸附孔7的孔径为5mm,且任意相邻的两所述吸附孔7之间的中心距为10mm,本实施例中所述吸附面板6下表面四周设有用于地面或墙面保持紧密接触的围裙8,从而在清扫墙面时,可通过所述真空吸附装置更稳定地将所述清洁机器人吸附在墙面上。
22.所述吸尘装置安装在所述壳体1内部,且其通过管道分别与各所述吸尘入口3连通,本实施例中所述壳体1底部还设有两电动刷头9,两所述电动刷头9分别设置在所述吸附槽口2左右两侧,且在工作时,两所述电动刷头9的转动方向相反,从而通过两所述电动刷头9与所述吸尘装置的配合,以将墙面打扫干净。
23.本实用新型中所述壳体1内部还设有用于感测所述清洁机器人与障碍物之间距离的红外传感器和用于所述清洁机器人清扫路线导航的陀螺仪,通过所述红外传感器,可避免所述清洁机器人与墙面上的障碍物发生碰撞,同时通过所述陀螺仪记录所述清洁机器人绕行方向,避免所述清洁机器人重复行走,免除重复清扫,提高清扫效率。
24.本实用新型的一种地墙两用型清洁机器人通过在所述壳体1内设置所述真空吸附
装置,从而通过所述真空吸附装置的吸附作用可使得所述清洁机器人对墙面的灰尘等垃圾进行清扫,以解决现有扫地机器人无法上墙的问题。
25.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本申请请求保护的范围。
26.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
27.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种地墙两用型清洁机器人,其特征在于:包括壳体、驱动装置、真空吸附装置和吸尘装置,所述壳体底部下方设有向下延伸的吸附槽口和若干吸尘入口,所述吸附槽口位于所述壳体底部的中部,所述驱动装置包括两独立驱动轮和随动轮,两所述独立驱动轮安装于所述壳体底部,且两所述独立驱动轮并排设置,所述随动轮安装于所述壳体底部,且其与两所述独立驱动轮不在同一直线上,所述真空吸附装置安装在所述壳体内部,且其位于所述吸附槽口正上方,所述吸尘装置安装在所述壳体内部,且其通过管道分别与各所述吸尘入口连通。2.如权利要求1所述的一种地墙两用型清洁机器人,其特征在于:所述壳体为半椭球形,所述吸附槽口横截面为长条形或方形。3.如权利要求1所述的一种地墙两用型清洁机器人,其特征在于:所述吸附槽口上嵌设有吸附面板,所述吸附面板上均匀设有若干吸附孔。4.如权利要求3所述的一种地墙两用型清洁机器人,其特征在于:所述吸附孔的孔径为4
‑
6mm。5.如权利要求3所述的一种地墙两用型清洁机器人,其特征在于:所述吸附面板下表面四周设有用于地面或墙面保持紧密接触的围裙。6.如权利要求1所述的一种地墙两用型清洁机器人,其特征在于:所述壳体底部还设有两电动刷头,两所述电动刷头分别设置在所述吸附槽口左右两侧。7.如权利要求1所述的一种地墙两用型清洁机器人,其特征在于:所述壳体内部还设有用于感测所述清洁机器人与障碍物之间距离的红外传感器和用于所述清洁机器人清扫路线导航的陀螺仪。
技术总结
本实用新型提供一种地墙两用型清洁机器人,包括壳体、驱动装置、真空吸附装置和吸尘装置,壳体底部下方设有向下延伸的吸附槽口和若干吸尘入口,吸附槽口位于壳体底部的中部,驱动装置包括两独立驱动轮和驱动轮,两独立驱动轮安装于壳体底部,且两独立驱动轮并排设置,随动轮安装于所述壳体底部,且其与两独立驱动轮不在同一直线上,真空吸附装置安装在壳体内部,且其位于吸附槽口正上方,吸尘装置安装在壳体内部,且其通过管道分别与各吸尘入口连通。本实用新型的有益效果:本实用新型通过在壳体内设置真空吸附装置,从而通过真空吸附装置的吸附作用可使得清洁机器人对墙面的灰尘等垃圾进行清扫,以解决现有扫地机器人无法上墙的问题。墙的问题。墙的问题。
技术研发人员:柯贤福 宗小峰 盖龄杰 秦浩翔 李传建 刘德华
受保护的技术使用者:中国地质大学(武汉)
技术研发日:2020.11.26
技术公布日:2021/12/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1