一种扫地机器人的制作方法
1.本实用新型涉及一种扫地机器人。
背景技术:
2.扫地机器人的灰尘盒一般设置在扫地机器人的中部,扫地机器人设有一放置灰尘盒的放置槽,当灰尘盒固定放置在放置盒内时,再通过一盖板盖住放置槽,当需要取出灰尘盒时,需要先掀开盖板,之后再取出,取出不方便。
技术实现要素:
3.本实用新型的目的是解决现有技术的不足,提供一种扫地机器人。
4.本实用新型的一种技术方案:
5.一种扫地机器人,包括灰尘盒和扫地机器人本体,所述扫地机器人本体的侧壁向内设有供灰尘盒插拔的插槽,所述插槽的顶部设有锁槽,所述灰尘盒包括盒体、盒盖、以及用于与扫地机器人本体相互锁紧的锁扣;所述盒盖与盒体形成吸尘仓,所述盒体的插入插槽内的一侧贯穿有进风口,所述盒盖插入插槽内的一侧贯穿有出风口,所述扫地机器人本体内的抽风机对准所述出风口,所述吸尘仓与出风口之间设有过滤结构;所述锁扣包括锁紧块和复位弹簧,所述盒体的远离进风口一侧设有容纳腔,所述锁紧块活动设置在容纳腔内,所述复位弹簧的底部与容纳腔的底部连接,顶部与锁紧块连接,所述盒盖的远离出风口一侧穿有通槽,当灰尘盒插入插槽内时,所述通槽位于锁槽的下方,所述锁紧块的顶部活动穿设在通槽和锁槽内。
6.一种优选的方案是所述锁紧块包括按压块和锁紧片,所述按压块的底部向内凹设有凹槽,所述凹槽内设有固定柱,所述复位弹簧的顶部套设在固定柱外;所述锁紧片活动穿设在通槽内。
7.一种优选的方案是所述按压块的外壁设有滑块,所述容纳腔的内壁设有滑槽,所述滑块滑动设置在滑槽内。
8.一种优选的方案是所述盒体的两侧设有导向槽,所述插槽的两侧壁设有导向条,所述导向条与导向槽滑动连接。
9.一种优选的方案是所述盒盖贯穿有安装槽,所述安装槽底部设有若干支撑条,所述过滤结构包括过滤网,以及设于过滤网上表面的过滤框,所述过滤网和过滤框分别设置在安装槽内,所述安装槽的表面设有盖板,所述盖板用于盖住所述安装槽。
10.一种优选的方案是所述过滤框包括框体,以及设于框体内的倾斜板,相邻倾斜板之间形成气流通道。
11.一种优选的方案是所述盒盖靠近盒体的一面设有密封圈,当盒盖与盒体相互盖合后,所述密封圈用于密封盒盖和盒体。
12.综合上述技术方案,本实用新型的有益效果:当需要取下灰尘盒时,按下锁紧块,锁紧块的顶部脱离锁槽,灰尘盒便可以从插槽内取出;当灰尘盒插入插槽内时,锁紧块在复
位弹簧的作用下,锁紧块的顶部插入锁槽内。
13.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
14.图1是本实用新型的立体图;
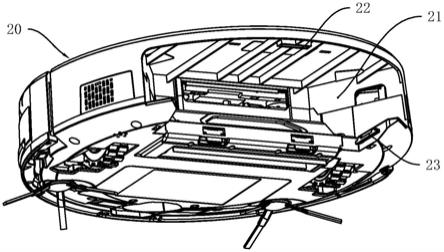
15.图2是本实用新型中扫地机器人本体的立体图;
16.图3是本实用新型中灰尘盒的立体图一;
17.图4本实用新型中灰尘盒的立体图二;
18.图5是本实用新型中灰尘盒的爆炸图;
19.图6是本实用新型中盒体的立体图;
20.图7是本实用新型中锁紧块的立体图;
21.图8是本实用新型中过滤框的立体图。
具体实施方式
22.为阐述本实用新型的思想及目的,下面将结合附图和具体实施例对本实用新型作进一步的说明。
23.如图1至图8所示,一种扫地机器人,包括灰尘盒10和扫地机器人本体20,所述扫地机器人本体20的侧壁向内设有供灰尘盒10插拔的插槽21,所述插槽21的顶部设有锁槽22,所述灰尘盒10包括盒体11,盒盖12,以及用于与扫地机器人相互锁紧的锁扣13;所述盒盖12与盒体11形成吸尘仓,所述盒体11的插入插槽21内的一侧贯穿有进风口111,所述盒盖12插入插槽21内的一侧贯穿有出风口121,所述扫地机器人本体20内的抽风机对准所述出风口121,所述吸尘仓与出风口121之间设有过滤结构14;所述锁扣13包括锁紧块131和复位弹簧,所述盒体11的远离进风口111一侧设有容纳腔112,所述锁紧块131活动设置在容纳腔112内,所述复位弹簧的底部与容纳腔112的底部连接,顶部与锁紧块131连接,所述盒盖12的远离出风口121一侧穿有通槽122,当灰尘盒10插入插槽21内时,所述通槽122位于锁槽22的下方,所述锁紧块131的顶部活动穿设在通槽122和锁槽22内。
24.如图1至图8所示,当需要取下灰尘盒10时,按下锁紧块131,锁紧块131的顶部脱离锁槽22,灰尘盒10便可以从插槽21内取出;当灰尘盒10插入插槽21内时,锁紧块131在复位弹簧的作用下,锁紧块131的顶部插入锁槽22内。
25.如图1至图8所示,所述锁紧块131包括按压块132和锁紧片133,所述按压块132的底部向内凹设有凹槽134,所述凹槽134内设有固定柱135,所述复位弹簧的顶部套设在固定柱135外;所述锁紧片133活动穿设在通槽122内。锁紧片133在复位弹簧的作用下可以活动穿设在通槽122和锁槽22内,方便灰尘盒10取出或者插入插槽21内。
26.如图1至图8所示,所述按压块132的外壁设有滑块136,所述容纳腔112的内壁设有滑槽113,所述滑块136滑动设置在滑槽113内。滑块136起到定位和导向作用。
27.如图1至图8所示,所述盒体11的两侧设有导向槽114,所述插槽21的两侧壁设有导向条23,所述导向条23与导向槽114滑动连接。导向条23起到定位和导向作用,方便灰尘盒
10插入插槽21内。
28.如图1至图8所示,所述盒盖12贯穿有安装槽123,所述安装槽123底部设有若干支撑条124,所述过滤结构14包括过滤网141,以及设于过滤网141上表面的过滤框142,所述过滤网141和过滤框142分别设置在安装槽123内,所述安装槽123的表面设有盖板15,所述盖板15用于盖住所述安装槽123。过滤网141起到过滤作用,防止灰尘从出风口121吸出,过滤框142可以压紧过滤网141。
29.如图1至图8所示,所述过滤框142包括框体143,以及设于框体143内的倾斜板144,相邻倾斜板144之间形成气流通道。
30.如图1至图8所示,所述盒盖12靠近盒体11的一面设有密封圈,当盒盖12与盒体11相互盖合后,所述密封圈用于密封盒盖12和盒体11。
31.以上是本实用新型的具体实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。
技术特征:
1.一种扫地机器人,其特征在于,包括灰尘盒和扫地机器人本体,所述扫地机器人本体的侧壁向内设有供灰尘盒插拔的插槽,所述插槽的顶部设有锁槽,所述灰尘盒包括盒体、盒盖、以及用于与扫地机器人本体相互锁紧的锁扣;所述盒盖与盒体形成吸尘仓,所述盒体的插入插槽内的一侧贯穿有进风口,所述盒盖插入插槽内的一侧贯穿有出风口,所述扫地机器人本体内的抽风机对准所述出风口,所述吸尘仓与出风口之间设有过滤结构;所述锁扣包括锁紧块和复位弹簧,所述盒体的远离进风口一侧设有容纳腔,所述锁紧块活动设置在容纳腔内,所述复位弹簧的底部与容纳腔的底部连接,顶部与锁紧块连接,所述盒盖的远离出风口一侧穿有通槽,当灰尘盒插入插槽内时,所述通槽位于锁槽的下方,所述锁紧块的顶部活动穿设在通槽和锁槽内。2.根据权利要求1所述一种扫地机器人,其特征在于,所述锁紧块包括按压块和锁紧片,所述按压块的底部向内凹设有凹槽,所述凹槽内设有固定柱,所述复位弹簧的顶部套设在固定柱外;所述锁紧片活动穿设在通槽内。3.根据权利要求2所述一种扫地机器人,其特征在于,所述按压块的外壁设有滑块,所述容纳腔的内壁设有滑槽,所述滑块滑动设置在滑槽内。4.根据权利要求1所述一种扫地机器人,其特征在于,所述盒体的两侧设有导向槽,所述插槽的两侧壁设有导向条,所述导向条与导向槽滑动连接。5.根据权利要求1至3任意一项所述一种扫地机器人,其特征在于,所述盒盖贯穿有安装槽,所述安装槽底部设有若干支撑条,所述过滤结构包括过滤网,以及设于过滤网上表面的过滤框,所述过滤网和过滤框分别设置在安装槽内,所述安装槽的表面设有盖板,所述盖板用于盖住所述安装槽。6.根据权利要求5所述一种扫地机器人,其特征在于,所述过滤框包括框体,以及设于框体内的倾斜板,相邻倾斜板之间形成气流通道。7.根据权利要求1所述一种扫地机器人,其特征在于,所述盒盖靠近盒体的一面设有密封圈,当盒盖与盒体相互盖合后,所述密封圈用于密封盒盖和盒体。
技术总结
本实用新型公开了一种扫地机器人,包括灰尘盒和扫地机器人本体,扫地机器人本体设有插槽,插槽的顶部设有锁槽,灰尘盒包括盒体、盒盖和锁扣;盒体的插入插槽内的一侧贯穿有进风口,盒盖插入插槽内的一侧贯穿有出风口,扫地机器人本体内的抽风机对准出风口,吸尘仓与出风口之间设有过滤结构;锁扣包括锁紧块和复位弹簧,盒体的远离进风口一侧设有容纳腔,锁紧块活动设置在容纳腔内,复位弹簧的底部与容纳腔的底部连接,顶部与锁紧块连接,盒盖的远离出风口一侧穿有通槽,当灰尘盒插入插槽内时,通槽位于锁槽的下方,锁紧块的顶部活动穿设在通槽和锁槽内。它的优点是方便取出灰尘盒;灰尘盒与扫地机器人本体锁紧或者解锁方便快捷。尘盒与扫地机器人本体锁紧或者解锁方便快捷。尘盒与扫地机器人本体锁紧或者解锁方便快捷。
技术研发人员:尹成良
受保护的技术使用者:深圳琥珀智通科技有限公司
技术研发日:2021.09.08
技术公布日:2022/3/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1