一种辊式拖地机器人的制作方法
本申请涉及清洁机器人,特别是涉及一种辊式拖地机器人。
背景技术:
1、拖地机器人可以自主在地面上行进,并对地面进行擦拖。相关技术中,拖 地机器人配置有驱动轮和擦拖件,通过驱动驱动轮运转来驱动拖地机器人行进, 并通过驱动拖擦件运转来擦拖地面,需要耗费过多的电量,或需要配置较多的 部件,尤其是电机,驱动成本过高。
技术实现思路
1、本申请实施例的目的在于提供一种辊式拖地机器人,可以借用辊拖件驱动 辊式拖地机器人前进/后退、转向,降低驱动成本。具体技术方案如下:
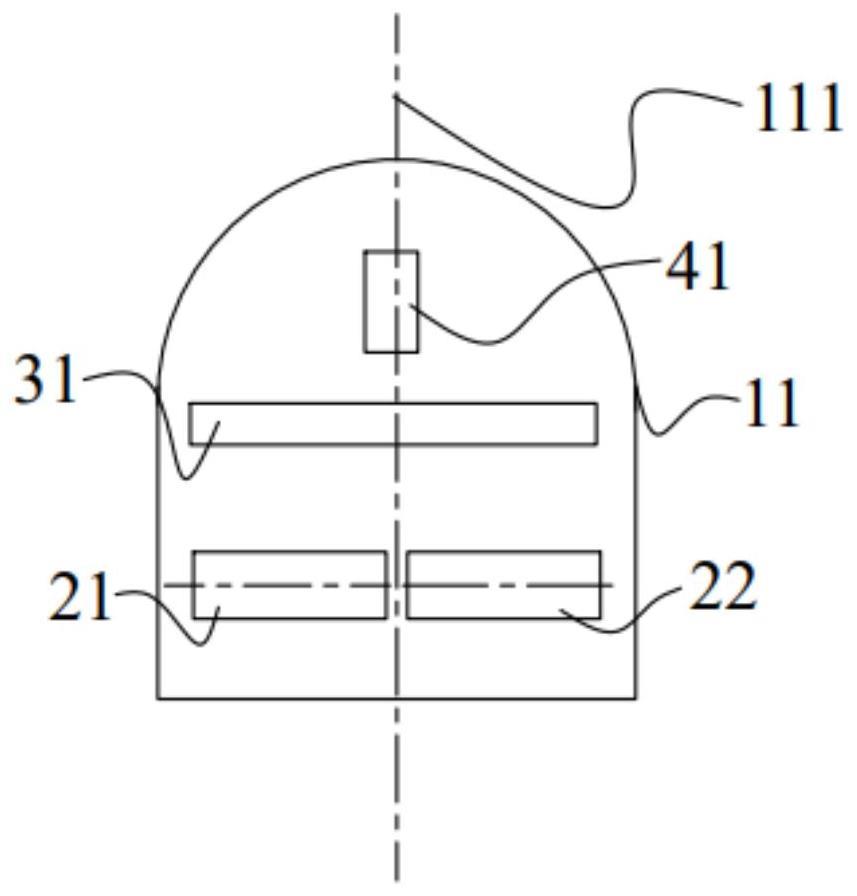
2、一种辊式拖地机器人,包括:
3、底盘;
4、用于拖擦地面的第一辊拖件,横向安装于所述底盘,并向下露出于所述底 盘;
5、用于拖擦地面的第二辊拖件,横向安装于所述底盘,并向下露出于所述底 盘;
6、所述第一辊拖件和所述第二辊拖件分设于所述底盘左右两侧;
7、驱动装置,用于驱动所述第一辊拖件和所述第二辊拖件同向转动以驱动所 述辊式拖地机器人前进或后退,及用于驱动所述第一辊拖件和第二辊拖件反向 转动以驱动所述辊式拖地机器人转向。
8、可选的,所述辊式拖地机器人,包括:
9、用于向所述第一辊拖件和所述第二辊拖件加水的加水件;
10、以及,
11、设于所述第一辊拖件和所述第二辊拖件前方的用于清洁所述第一辊拖件 和所述第二辊拖件的第一清洁组件;所述第一清洁组件包括:位于加水位置下 方的抵接于所述第一辊拖件和第二辊拖件上的第一刮污件,位于所述第一刮污 件下方的,用于承接所述第一刮污件所刮污水的第一污水槽;
12、和/或,
13、设于所述第一辊拖件和第二辊拖件后方的用于清洁所述第一辊拖件和所 述第二辊拖件的第二清洁组件;所述第二清洁组件包括:位于加水位置下方的 抵接于所述第一辊拖件和第二辊拖件上的第二刮污件,位于所述第二刮污件下 方的,用于承接所述第二刮污件所刮污水的第二污水槽。
14、可选的,所述辊式拖地机器人还包括污水箱,以及用于将第一污水槽和/ 或第二污水槽中的污水抽送至所述污水箱中的动力装置。
15、可选的,所第一辊拖件和所述第二辊拖件的周面设有由不同材质构成的驱 动区和擦地区,所述驱动区的摩擦系数大于所述擦地区的摩擦系数,以使所述 第一辊拖件或第二辊拖件的驱动区接触地面时带动所述辊式拖地机器人行进, 且使所述第一辊拖件或第二辊拖件的擦地区接触地面时相对地面打滑以擦拖 地面。
16、可选的,所述擦地区的宽度大于所述驱动区的宽度。
17、可选的,所述第一辊拖件和所述第二辊拖件为单辊轴式拖擦件,所述单辊 轴式拖擦件包括一辊轴,以及设于所述辊轴上的擦拭层;
18、或,
19、所述第一辊拖件和所述第二辊拖件为履带式拖擦件,所述履带式拖擦件包 括:并排设置的第一辊轴和第二辊轴,以及绕设于所述第一辊轴和所述第二辊 轴的擦拭层。
20、可选的,所述第一辊拖件和所述第二辊拖件与所述底盘浮动连接;
21、和/或,
22、所述第一辊拖件和所述第二辊拖件通过升降传动件与底盘连接,所述升降 传动件与升降电机传动连接,以使升降电机通过所述升降传动件驱动所述第一 辊拖件和第二辊拖件升降。
23、可选的,所述第一辊拖件和所述第二辊拖件前后交错设置;
24、或者,所述第一辊拖件和所述第二辊拖件的旋转轴线与所述底盘的左右中 轴线皆平行,且所述第一辊拖件和所述第二辊拖件对称设置于所述底盘的前后 中轴线两侧;
25、或者,所述第一辊拖件和第二辊拖件的旋转轴线与所述底盘的左右中轴线 成角度a设置,角度a大于0且小于45度,且所述第一辊拖件和所述第二辊拖件 对称设置于所述底盘的前后中轴线两侧。
26、可选的,所述底盘底部设有位于所述第一辊拖件和所述第二辊拖件前方的 第一万向轮,和/或,位于所述第一辊拖件和所述第二辊拖件前方的第二万向轮;
27、所述驱动装置包括:
28、与所述第一辊拖件传动连接的第一电机;
29、与所述第二辊拖件传动连接的第二电机;
30、与所述第一电机和所述第二电机电连接的驱动电路,用于驱动所述第一电 机和第二电机同向转动,及反向转动。
31、可选的,所述底盘底部设有位于所述第一辊拖件和所述第二辊拖件前方的 吸尘口、容置于所述吸尘口的清扫滚刷、与所述吸尘口连通的尘盒、与所述尘 盒连通的吸尘风机。
32、相比于现有技术,本申请至少具有如下技术效果:
33、1、第一辊拖件和第二辊拖件的横向设置,且分设于底盘左右两侧,可以 使得第一辊拖件和第二辊拖件同向转动驱动辊式拖地机器人前进或后退,以及 第一辊拖件和第二辊拖件反向转动以驱动辊式拖地机器人转向,既使用了第一 辊拖件和第二辊拖件擦拖地面,又使用第一辊拖件和第二辊拖件转动所形成的 驱动力驱动辊式拖地机器前进、后退、转向,可以节省驱动成本,也可以无需 额外增加驱动轮,也可以使辊式拖地机器人的重量主要由第一辊拖件和第二辊 拖件支撑,提高了第一辊拖件和第二辊拖件对地面的压力,提高了擦拖效果。
34、2、第一辊拖件和第二辊拖件的前方和后方皆设置清洗组件,可以使得辊 拖件在为了进行前进、后退、转向,而进行向前转动和向后转动时,皆可以实 现较好的水洗地面和实时自清洁。
35、3、第一辊拖件和第二辊拖件的周面设有由不同材质构成的驱动区和擦地 区,驱动区的摩擦系数大于擦地区的摩擦系数,以使第一辊拖件或第二辊拖件 的驱动区接触地面时带动辊式拖地机器人行进,且使第一辊拖件或第二辊拖件 的擦地区接触地面时相对地面打滑以擦拖地面。这样使得第一辊拖和第二辊拖 旋转过程中,擦地区与地面接触,可以与地面相对打滑,提高地面与擦拖件接 触的时长或面积,提高地面擦拖效果,转动到驱动区与地面接触时,由于摩擦 力增加,可以有效带动辊式拖地机器人行进,离开当前所擦拖的位置,使辊拖 更好的兼顾擦拖清洁以及驱动行进。
36、当然,实施本申请的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种辊式拖地机器人,其特征在于,包括:
2.根据权利要求1所述的辊式拖地机器人,其特征在于,所述辊式拖地机器人,包括:
3.根据权利要求2所述的辊式拖地机器人,其特征在于,所述辊式拖地机器人还包括污水箱,以及用于将第一污水槽和/或第二污水槽中的污水抽送至所述污水箱中的动力装置。
4.根据权利要求1所述的辊式拖地机器人,其特征在于,所第一辊拖件和所述第二辊拖件的周面设有由不同材质构成的驱动区和擦地区,所述驱动区的摩擦系数大于所述擦地区的摩擦系数,以使所述第一辊拖件或第二辊拖件的驱动区接触地面时带动所述辊式拖地机器人行进,且使所述第一辊拖件或第二辊拖件的擦地区接触地面时相对地面打滑以擦拖地面。
5.根据权利要求4所述的辊式拖地机器人,其特征在于,所述擦地区的宽度大于所述驱动区的宽度。
6.根据权利要求1至5任一所述的辊式拖地机器人,其特征在于,所述第一辊拖件和所述第二辊拖件为单辊轴式拖擦件,所述单辊轴式拖擦件包括一辊轴,以及设于所述辊轴上的擦拭层;
7.根据权利要求1至5任一所述的辊式拖地机器人,其特征在于,所述第一辊拖件和所述第二辊拖件与所述底盘浮动连接;
8.根据权利要求1所述的辊式拖地机器人,其特征在于,所述第一辊拖件和所述第二辊拖件前后交错设置;
9.根据权利要求1所述的辊式拖地机器人,其特征在于,所述底盘底部设有位于所述第一辊拖件和所述第二辊拖件前方的第一万向轮,和/或,位于所述第一辊拖件和所述第二辊拖件前方的第二万向轮;
10.根据权利要求1所述的辊式拖地机器人,其特征在于,所述底盘底部设有位于所述第一辊拖件和所述第二辊拖件前方的吸尘口、容置于所述吸尘口的清扫滚刷、与所述吸尘口连通的尘盒、与所述尘盒连通的吸尘风机。
技术总结
本申请实施例提供了一种辊式拖地机器人,涉及清洁机器人技术领域。该辊式拖地机器人,包括:底盘;用于拖擦地面的第一辊拖件,横向安装于底盘,并向下露出于底盘;用于拖擦地面的第二辊拖件,横向安装于底盘,并向下露出于底盘;第一辊拖件和第二辊拖件分设于底盘左右两侧;驱动装置,用于驱动第一辊拖件和第二辊拖件同向转动以驱动辊式拖地机器人前进或后退,及用于驱动第一辊拖件和第二辊拖件反向转动以驱动辊式拖地机器人转向。采用本申请可以借用辊拖件驱动辊式拖地机器人前进/后退、转向,降低驱动成本。
技术研发人员:魏云杰
受保护的技术使用者:尚科宁家(中国)科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!