清洁设备的建图方法及系统、存储介质及清洁设备与流程
【】本发明涉及家用电器领域,具体涉及一种清洁设备的建图方法。
背景技术
0、
背景技术:
1、随着自动化技术和人工智能技术的不断发展,扫地机、洗地机等各种清洁设备的应用越来越广泛。但是,在传统技术中,由于现有的扫地机无法确定台阶的位置,导致现有的扫地机的清洁策略较为简单,遇到台阶时,极易被困,其原因主要是对台阶的建图过程较为简单,从而很难实现针对性的清洁策略,导致清洁效率低下。
2、有鉴于此,实有必要开发一种清洁设备的建图方法及系统、存储介质及清洁设备,用以解决上述问题。
技术实现思路
0、
技术实现要素:
1、针对现有技术的不足之处,本发明的目的在于提供一种清洁设备的建图方法,所述方法包括:
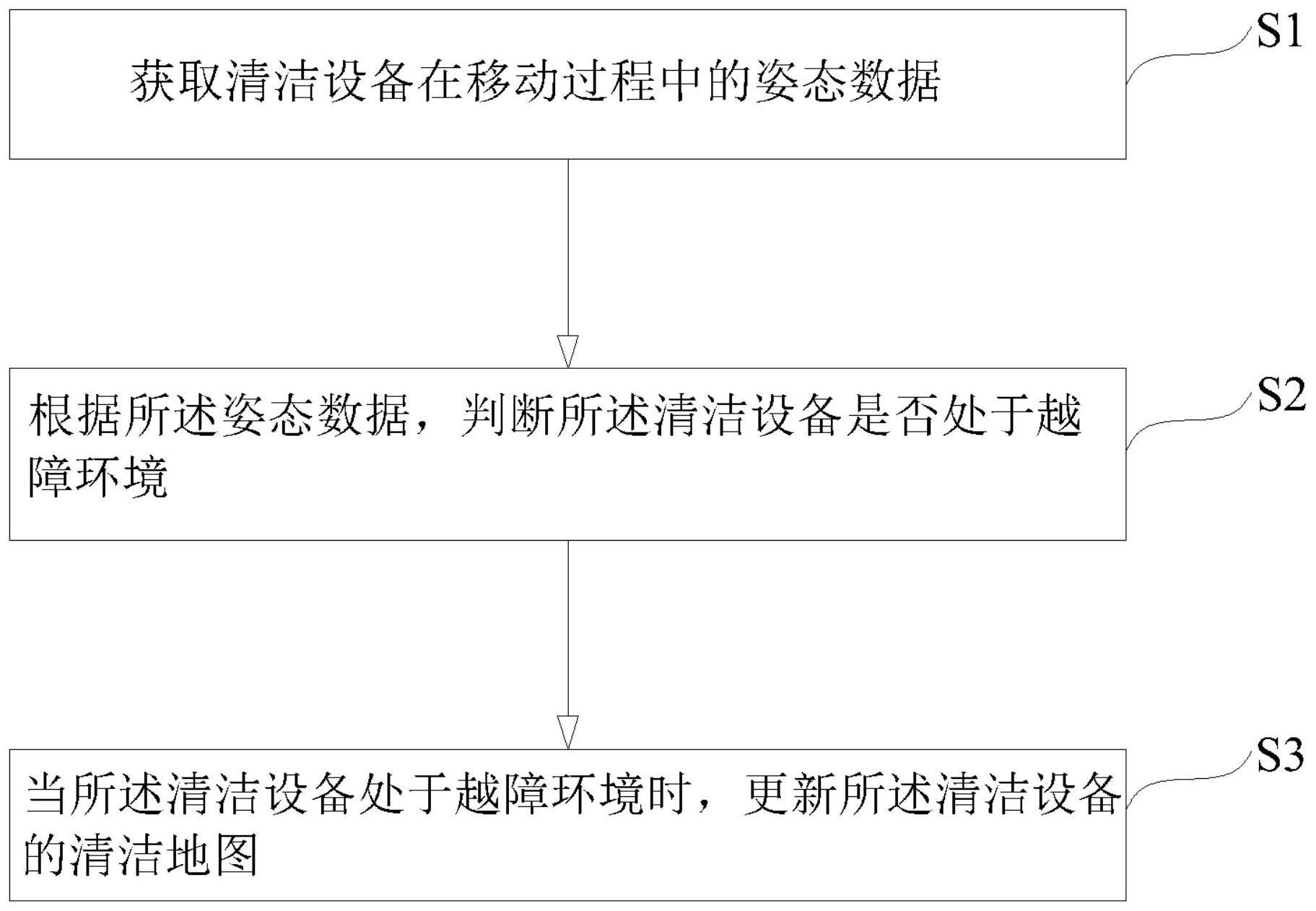
2、获取清洁设备在移动过程中的姿态数据;
3、根据所述姿态数据,判断所述清洁设备是否处于越障环境;
4、当所述清洁设备处于越障环境时,更新所述清洁设备的清洁地图。
5、优选的,所述获取清洁设备在移动过程中的姿态数据,包括:
6、获取所述清洁设备中至少两个判断点的高度数据,所述高度数据为每个判断点相对所述清洁设备最低点的垂直距离;
7、根据至少两个判断点的高度数据,及至少两个判断点之间的位置关系,确定所述清洁设备的倾斜角度。
8、优选的,所述根据所述姿态数据,判断所述清洁设备是否处于越障环境,包括:
9、判断所述倾斜角度是否满足预设倾斜范围;
10、当所述倾斜角度满足所述预设倾斜范围,则确定所述清洁设备处于越障环境。
11、优选的,当所述倾斜角度满足所述预设倾斜范围,则确定所述清洁设备处于越障环境,之后还包括:
12、获取所述清洁设备的支撑台面的点云数据;
13、根据所述点云数据,确定所述支撑台面的特征数据,所述特征数据包括台面长度和台面平整度;
14、当所述特征数据满足预设特征,则将所述越障环境定义为台阶特征。
15、优选的,所述预设倾斜范围包括第一预设倾斜角度和第二预设倾斜角度,所述第一预设倾斜角度小于所述第二预设倾斜角度;
16、当所述倾斜角度在所述第一预设倾斜角度和所述第二预设倾斜角度之间时,确定所述清洁设备处于越障环境;
17、当所述倾斜角度大于所述第二预设倾斜角度时,则控制所述清洁设备向后移动,以降低所述清洁设备的倾斜角度。
18、优选的,当所述清洁设备处于越障环境时,更新所述清洁设备的清洁地图,包括:
19、当所述清洁设备处于越障环境中时,控制所述清洁设备继续移动;
20、按照预设频率持续获得所述清洁设备的姿态数据,直到通过所述姿态数据判断出所述清洁设备脱离越障环境;
21、根据所述清洁设备通过所述越障环境的移动数据,及预先构建的清洁地图,获得更新后的清洁地图。
22、优选的,所述按照预设频率持续获得所述清洁设备的姿态数据,直到通过所述姿态数据判断出所述清洁设备脱离越障环境,还包括:
23、按照预设频率持续获得所述清洁设备的姿态数据,当通过所述姿态数据判断出所述清洁设备不属于越障环境时,继续获得预设数量的姿态数据;
24、当通过所述预设数量的姿态数据均判断出所述清洁设备不属于越障环境时,则确定所述清洁设备脱离越障环境。
25、优选的,所述根据所述清洁设备通过所述越障环境的移动数据,及预先构建的清洁地图,获得更新后的清洁地图,包括:
26、根据所述清洁设备通过所述越障环境的移动数据,确定所述清洁设备的移动距离和多个姿态数据;
27、根据所述多个姿态数据和移动距离,确定所述越障环境的高差;
28、根据所述高差,及所述越障环境在预先构建的清洁地图中的位置,获得更新后的清洁地图。
29、优选的,所述根据所述高差,及所述越障环境在预先构建的清洁地图中的位置,获得更新后的清洁地图,之后包括:
30、当所述高差超过预设高差时,根据所述越障环境,将更新后的清洁地图进行分割处理,以得到第一分割地图和第二分割地图;
31、根据所述清洁设备在第一分割地图或第二分割地图的位置,生成针对第一分割地图或第二分割地图的清洁路径;
32、按照所述清洁路径,对第一分割地图或第二分割地图进行清洁处理。
33、另一方面,本发明还提供一种清洁设备的建图系统,包括:获取模块,被配置用于获取清洁设备在移动过程中的姿态数据;
34、确定模块,被配置用于根据所述姿态数据,判断所述清洁设备是否处于越障环境;以及
35、处理模块,被配置用于当所述清洁设备处于越障环境时,更新所述清洁设备的清洁地图。
36、另一方面,本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行如上述任一项所述的方法。
37、另一方面,本发明还提供一种清洁设备,包括清洁本体与电子设备,所述电子设备包括:处理器;存储器;以及计算机程序程序,其中所述计算机程序程序被存储在所述存储器中,并且被配置成由处理器执行,所述计算机程序程序包括用于执行如上述任一项所述的方法。
38、相比现有技术,本发明的有益效果在于:
39、本发明提供的一种清洁设备的建图方法及系统、存储介质及清洁设备,其通过获取清洁区域内的台阶信息以同步更新清洁地图,以使得清洁设备根据更新后的清洁地图将清洁区域精细化分区清洁,提高清洁设备的清洁效率,减少清洁机器人被困发生的概率。
40、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
技术特征:
1.一种清洁设备的建图方法,其特征在于,所述方法包括:
2.如权利要求1所述的清洁设备的建图方法,其特征在于,所述获取清洁设备在移动过程中的姿态数据,包括:
3.如权利要求2所述的清洁设备的建图方法,其特征在于,所述根据所述姿态数据,判断所述清洁设备是否处于越障环境,包括:
4.如权利要求3所述的清洁设备的建图方法,其特征在于,当所述倾斜角度满足所述预设倾斜范围,则确定所述清洁设备处于越障环境,之后还包括:
5.如权利要求2所述的清洁设备的建图方法,其特征在于,所述预设倾斜范围包括第一预设倾斜角度和第二预设倾斜角度,所述第一预设倾斜角度小于所述第二预设倾斜角度;
6.如权利要求1所述的清洁设备的建图方法,其特征在于,当所述清洁设备处于越障环境时,更新所述清洁设备的清洁地图,包括:
7.如权利要求6所述的清洁设备的建图方法,其特征在于,所述按照预设频率持续获得所述清洁设备的姿态数据,直到通过所述姿态数据判断出所述清洁设备脱离越障环境,还包括:
8.如权利要求6所述的清洁设备的建图方法,其特征在于,所述根据所述清洁设备通过所述越障环境的移动数据,及预先构建的清洁地图,获得更新后的清洁地图,包括:
9.如权利要求6所述的清洁设备的建图方法,其特征在于,所述根据所述高差,及所述越障环境在预先构建的清洁地图中的位置,获得更新后的清洁地图,之后包括:
10.一种清洁设备的建图系统,其特征在于,包括:获取模块,被配置用于获取清洁设备在移动过程中的姿态数据;
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行如权利要求1~9中任一项所述的方法。
12.一种清洁设备,其特征在于,包括清洁本体与电子设备,所述电子设备包括:处理器;存储器;以及计算机程序程序,其中所述计算机程序程序被存储在所述存储器中,并且被配置成由处理器执行,所述计算机程序程序包括用于执行如权利要求1~9中任一项所述的方法。
技术总结
本发明涉及一种清洁设备的建图方法及系统、存储介质及清洁设备,其中清洁设备的建图方法包括:获取清洁设备在移动过程中的姿态数据;根据所述姿态数据,判断所述清洁设备是否处于越障环境;当所述清洁设备处于越障环境时,更新所述清洁设备的清洁地图。该清洁设备的建图方法通过获取清洁区域内的台阶信息以同步更新清洁地图,以使得清洁设备根据更新后的清洁地图将清洁区域精细化分区清洁,提高清洁设备的清洁效率,减少清洁机器人被困发生的概率。
技术研发人员:孙佳佳,丘伟楠,徐银波
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!