一种清洁控制方法及相关装置与流程
本发明涉及智能家居,特别涉及一种清洁控制方法及相关装置。
背景技术:
1、清洁设备能够与清洁机器人配合,实现对清洁机器人的清扫头或拖布的清洁功能,以及回收清洁机器人收集的垃圾等。便于对清洁机器人进行清洁维护,使得清洁机器人可以进行下一次扫地或拖地操作。
2、清洁设备一般设置有用于清洗拖布的清洗槽,清洁设备通过向清洗槽中注入清洗液,并使得容置于清洗槽中的拖布转动以实现清洗。目前对拖布进行清洗时,清洗槽注入的清洗液量是固定的,但是由于清洁机器人每次进行的拖地任务并不完全一致,若拖布的脏污指数较高,可能造成清洗不充分,若拖布的脏污指数较低,则可能造成清洗液的浪费,且清洗效率也较低。
技术实现思路
1、本发明提供一种清洁控制方法及相关装置,以解决现有技术中清洁设备对清洁机器人的拖布清洗不充分或清洗效率低的技术问题。
2、为解决上述技术问题,本发明采用的一个技术方案是提供一种清洁控制方法,应用于清洁设备,包括:
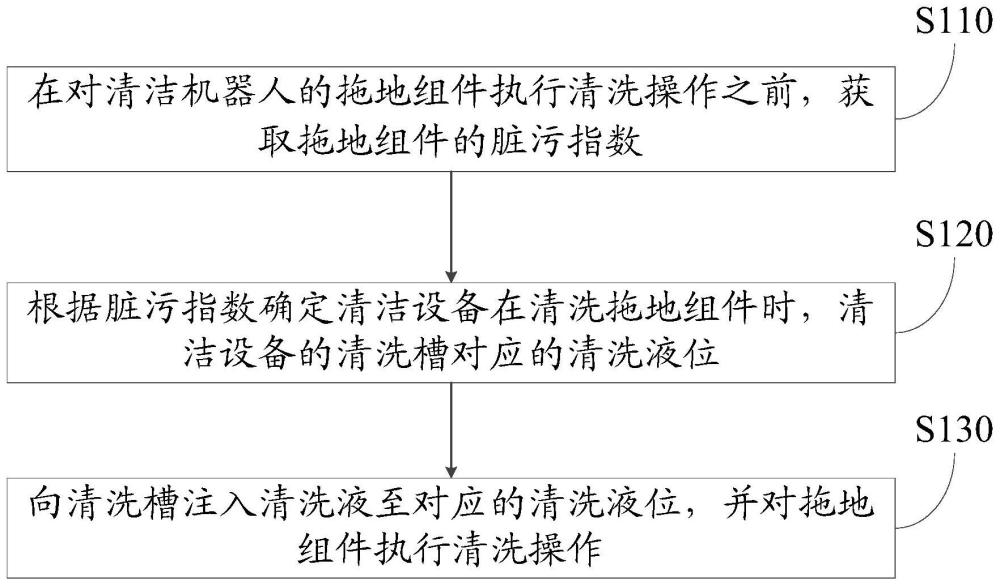
3、在对清洁机器人的拖地组件执行清洗操作之前,获取所述拖地组件的脏污指数;
4、根据所述脏污指数确定清洁设备在清洗所述拖地组件时,所述清洁设备的清洗槽对应的清洗液位;
5、向所述清洗槽注入清洗液至所述对应的清洗液位,并对所述拖地组件执行清洗操作。
6、在一具体实施例中,所述获取所述拖地组件的脏污指数的方法包括:
7、接收由所述清洁机器人发送的所述拖地组件的脏污指数,所述脏污指数为所述清洁机器人根据拖地任务中的任务参数确定的。
8、在一具体实施例中,所述获取所述拖地组件的脏污指数的方法包括:
9、启动用于检测所述拖地组件的至少一个传感器,并通过所述至少一个传感器检测所述拖地组件,以获取所述拖地组件的脏污指数。
10、在一具体实施例中,所述对所述拖地组件执行清洗操作的方法包括:
11、判断所述清洗槽内的液位是否超过预设液位;
12、若所述清洗槽内的液位高于所述预设液位,控制所述拖地组件以第一旋转速度旋转;
13、若所述清洗槽内的液位不高于所述预设液位,控制所述拖地组件以第二旋转速度旋转;
14、其中,所述第一旋转速度小于所述第二旋转速度。
15、在一具体实施例中,所述对所述拖地组件执行清洗操作的方法包括:
16、根据所述清洗槽内的清洗液位,确定所述拖地组件的清洗时长。
17、在一具体实施例中,所述获取所述拖地组件的脏污指数之后,所述方法还包括:
18、判断所述脏污指数是否低于预设脏污指数;
19、若所述脏污指数低于所述预设脏污指数,则不对所述拖地组件进行清洗;
20、若所述脏污指数不低于所述预设脏污指数,则对所述拖地组件进行清洗。
21、在一具体实施例中,所述对所述拖地组件执行清洗操作之后,所述方法还包括:
22、根据所述清洗槽的清洗液位确定对所述清洗槽抽吸清洗液的时间,以及所述拖地组件的脱水时间以及烘干时间。
23、为解决上述技术问题,本发明采用的另一个技术方案是提供一种清洁控制方法,应用于清洁机器人,包括:
24、获取所述清洁机器人在执行当前拖地任务时所对应的m个任务参数;
25、根据所述m个任务参数中每个参数的置信度,从所述m个参数中选取n个目标任务参数;
26、确定所述n个目标任务参数中每个目标任务参数的权重;
27、根据所述n个目标任务参数和所述每个目标任务参数的权重,确定所述拖地组件的脏污指数;
28、将所述拖地组件的脏污指数发送给所述清洁设备;
29、其中,所述任务参数包括以下至少一种:
30、拖地面积、拖地时长、拖地吸力、拖地压力、拖地速度、拖地区域属性、耗电量、耗水量、拖地频率。
31、为解决上述技术问题,本发明采用的另一个技术方案是提供一种清洁设备,包括:
32、设备主体;
33、清洗槽,形成于所述设备主体,且与清洗液机构连接;
34、处理器,设置于所述设备主体上,用于在对清洁机器人的拖地组件执行清洗操作之前,获取清洁机器人的拖地组件的脏污指数,根据脏污指数确定所述清洁设备在清洗所述拖地组件时,所述清洁设备的所述清洗槽对应的清洗液位;
35、控制器,设置于所述设备主体上,且与所述处理器通信连接,用于控制所述清洗液机构向所述清洗槽注入清洗液至对应的清洗液位,并控制所述拖地组件转动,以执行清洗操作。
36、为解决上述技术问题,本发明采用的另一个技术方案是提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述的清洁控制方法。
37、本发明清洁控制方法应用于清洁设备,包括在对清洁机器人的拖地组件执行清洗操作之前,获取拖地组件的脏污指数,根据脏污指数确定清洁设备在清洗拖地组件时,清洁设备的清洗槽对应的清洗液位,向清洗槽注入清洗液至对应的清洗液位,并对拖地组件执行清洗操作,通过根据拖地组件的脏污指数向清洗槽注入对应的清洗液位,能够使得拖地组件的脏污指数较高时,清洁设备对拖地组件的清洗更加充分,提高清洗效果,还能够使得拖地组件的脏污指数较低时,避免浪费清洗液,提高清洗效率。
技术特征:
1.一种清洁控制方法,其特征在于,应用于清洁设备,包括:
2.根据权利要求1所述的清洁控制方法,其特征在于,所述获取所述拖地组件的脏污指数的方法包括:
3.根据权利要求1或2所述的清洁控制方法,其特征在于,所述获取所述拖地组件的脏污指数的方法包括:
4.根据权利要求1所述的清洁控制方法,其特征在于,所述对所述拖地组件执行清洗操作的方法包括:
5.根据权利要求1所述的清洁控制方法,其特征在于,所述对所述拖地组件执行清洗操作的方法包括:
6.根据权利要求1所述的清洁控制方法,其特征在于,所述获取所述拖地组件的脏污指数之后,所述方法还包括:
7.根据权利要求1所述的清洁控制方法,其特征在于,所述对所述拖地组件执行清洗操作之后,所述方法还包括:
8.一种清洁控制方法,其特征在于,应用于清洁机器人,包括:
9.一种清洁设备,其特征在于,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项或权利要求8所述的清洁控制方法。
技术总结
本发明公开了一种清洁控制方法及相关装置,所述清洁控制方法应用于清洁设备,包括在对清洁机器人的拖地组件执行清洗操作之前,获取拖地组件的脏污指数,根据脏污指数确定清洁设备在清洗拖地组件时,清洁设备的清洗槽对应的清洗液位,向清洗槽注入清洗液至对应的清洗液位,并对拖地组件执行清洗操作,通过根据拖地组件的脏污指数向清洗槽注入对应的清洗液位,能够使得拖地组件的脏污指数较高时,清洁设备对拖地组件的清洗更加充分,提高清洗效果,还能够使得拖地组件的脏污指数较低时,避免浪费清洗液,提高清洗效率。
技术研发人员:张诗宇,罗华菊,李昂,郭盖华
受保护的技术使用者:深圳乐动机器人股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!