一种表面清洁装置的控制方法及表面清洁装置与流程
本申请涉及清洁,具体地涉及一种表面清洁装置的控制方法及表面清洁装置。
背景技术:
1、表面清洁装置是一种可以提供清洁功能的家用电器,例如擦窗机器人、扫地机器人等自移动表面清洁装置。表面清洁装置的底部通常设有驱动单元,通过驱动单元可以驱动表面清洁装置在待清洁表面行走。当表面清洁装置在待清洁表面行走时,可以通过清洁单元对待清洁表面进行擦拭或清扫,进而实现对待清洁表面的清洁效果。
2、现有技术中,常见的驱动单元包括转动驱动单元和/或平动驱动单元。其中,转动驱动单元用于驱动表面清洁装置在待清洁表面转动,平动驱动单元用于驱动表面清洁装置在待清洁表面平动。对于包含转动驱动单元的表面清洁装置,通常在表面清洁装置上定义起始工作时的姿态(在下文中称为“工作位姿”),表面清洁装置由工作位姿开始执行表面清洁操作。可理解,为了便于表面清洁装置工作,用户需要按照工作位姿将表面清洁装置放置在待清洁表面上,操作不便,用户体验较差。
技术实现思路
1、有鉴于此,本申请提供一种表面清洁装置的控制方法及表面清洁装置,以利于解决现有技术中用户需要按照工作位姿将表面清洁装置放置在待清洁表面上,操作不便,用户体验较差的问题。
2、第一方面,本申请实施例提供了一种表面清洁装置的控制方法,所述表面清洁装置包括第一驱动单元和第二驱动单元,所述第一驱动单元用于驱动所述表面清洁装置在待清洁表面上转动,所述第二驱动单元用于驱动所述表面清洁装置在所述待清洁表面上平动,所述方法包括:
3、控制所述表面清洁装置按照第一转动方向由第一角度向第二角度转动,所述第一角度为所述表面清洁装置在所述待清洁表面上的初始位姿对应的角度,所述第二角度为所述表面清洁装置在所述待清洁表面上的工作位姿对应的角度;
4、若所述表面清洁装置按照所述第一转动方向由所述第一角度转动至第三角度时,检测到第一边界,控制所述表面清洁装置按照第二转动方向由所述第三角度向第四角度转动;当所述表面清洁装置转动至所述第四角度时,控制所述表面清洁装置向远离所述第一边界的方向平动;控制所述表面清洁装置按照所述第一转动方向转动至所述第二角度;其中,所述第一转动方向和所述第二转动方向相反,所述第三角度和所述第二角度的差值小于90°,所述第四角度和所述第二角度相差90°;
5、若所述表面清洁装置按照所述第一转动方向由所述第一角度转动至第五角度时,检测到第二边界,则控制所述表面清洁装置按照所述第二转动方向转动至所述第二角度,其中,所述第五角度和所述第二角度的差值大于90°。
6、在一种可能的实现方式中,所述方法还包括:
7、若所述表面清洁装置按照所述第二转动方向由所述第三角度向所述第四角度转动的过程中检测到第二边界,则输出告警信息。
8、在一种可能的实现方式中,在所述表面清洁装置按照所述第一转动方向由所述第一角度转动至第三角度后,所述方法还包括:根据所述表面清洁装置的最大旋转半径lmax、所述第二角度α、所述第三角度β和所述表面清洁装置的最大旋转半径与所述表面清洁装置的中轴线之间的夹角γ,计算第一距离l1;
9、所述当所述表面清洁装置转动至所述第四角度时,控制所述表面清洁装置向远离所述第一边界的方向平动,包括:当所述表面清洁装置转动至所述第四角度时,控制所述表面清洁装置向远离所述第一边界的方向平动所述第一距离l1,使得所述表面清洁装置的旋转中心与所述第一边界之间的距离大于或等于所述最大旋转半径lmax。
10、在一种可能的实现方式中,所述根据所述表面清洁装置的最大旋转半径lmax、所述第二角度α、所述第三角度β和所述表面清洁装置的最大旋转半径与所述表面清洁装置的中轴线之间的夹角γ,计算第一距离l1,包括:
11、根据公式l1=lmax-lmax·cos(|α-β|-γ)计算所述第一距离l1。
12、在一种可能的实现方式中,若沿顺时针方向,所述第一角度和所述第二角度之间的差值小于180°,则所述第一转动方向为顺时针方向;
13、若沿逆时针方向,所述第一角度和所述第二角度之间的差值小于180°,则所述第一转动方向为拟时针方向。
14、在一种可能的实现方式中,所述控制所述表面清洁装置按照所述第二转动方向转动至所述第二角度,包括:
15、控制所述表面清洁装置按照所述第二转动方向由所述第五角度向第六角度转动,所述第六角度与所述第二角度相差90°;
16、当所述表面清洁装置转动至所述第六角度时,控制所述表面清洁装置向远离所述第一边界的方向平动;
17、控制所述表面清洁装置按照所述第二转动方向转动至所述第二角度。
18、在一种可能的实现方式中,在所述表面清洁装置按照所述第一转动方向由所述第一角度转动至第五角度后,所述方法还包括:根据所述表面清洁装置的最大旋转半径lmax和最小旋转半径lmin,计算第二距离l2;
19、所述控制所述表面清洁装置向远离所述第一边界的方向平动,包括:控制所述表面清洁装置向远离所述第一边界的方向平动所述第二距离l2,使得所述表面清洁装置的旋转中心与所述第一边界之间的距离大于或等于所述最大旋转半径lmax。
20、在一种可能的实现方式中,所述根据所述表面清洁装置的最大旋转半径lmax和最小旋转半径lmin,计算第二距离l2,包括:
21、根据公式l2=lmax-lmin计算所述第二距离l2。
22、在一种可能的实现方式中,所述方法还包括:
23、若所述表面清洁装置按照第二转动方向由所述第五角度向所述第六角度转动的过程中检测到第三边界,则输出告警信息,所述第一边界和所述第三边界相对设置。
24、第二方面,本申请实施例提供了一种表面清洁装置,包括:
25、处理器;
26、存储器;
27、以及计算机程序,其中所述计算机程序被存储在所述存储器中,所述计算机程序包括指令,当所述指令被所述处理器执行时,使得所述表面清洁装置执行第一方面中任意一项所述的方法。
28、采用本申请实施例提供的技术方案,在执行清洁操作之前,用户可以以任意位姿将表面清洁装置放置在待清洁表面上,表面清洁装置自动调整姿态至工作位姿,操作方便,提高用户体验。
技术特征:
1.一种表面清洁装置的控制方法,其特征在于,所述表面清洁装置包括第一驱动单元和第二驱动单元,所述第一驱动单元用于驱动所述表面清洁装置在待清洁表面上转动,所述第二驱动单元用于驱动所述表面清洁装置在所述待清洁表面上平动,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,所述根据所述表面清洁装置的最大旋转半径lmax、所述第二角度α、所述第三角度β和所述表面清洁装置的最大旋转半径与所述表面清洁装置的中轴线之间的夹角γ,计算第一距离l1,包括:
5.根据权利要求1所述的方法,其特征在于,
6.根据权利要求1所述的方法,其特征在于,所述控制所述表面清洁装置按照所述第二转动方向转动至所述第二角度,包括:
7.根据权利要求6所述的方法,其特征在于,在所述表面清洁装置按照所述第一转动方向由所述第一角度转动至第五角度后,所述方法还包括:根据所述表面清洁装置的最大旋转半径lmax和最小旋转半径lmin,计算第二距离l2;
8.根据权利要求7所述的方法,其特征在于,所述根据所述表面清洁装置的最大旋转半径lmax和最小旋转半径lmin,计算第二距离l2,包括:
9.根据权利要求8所述的方法,其特征在于,所述方法还包括:
10.一种表面清洁装置,其特征在于,包括:
技术总结
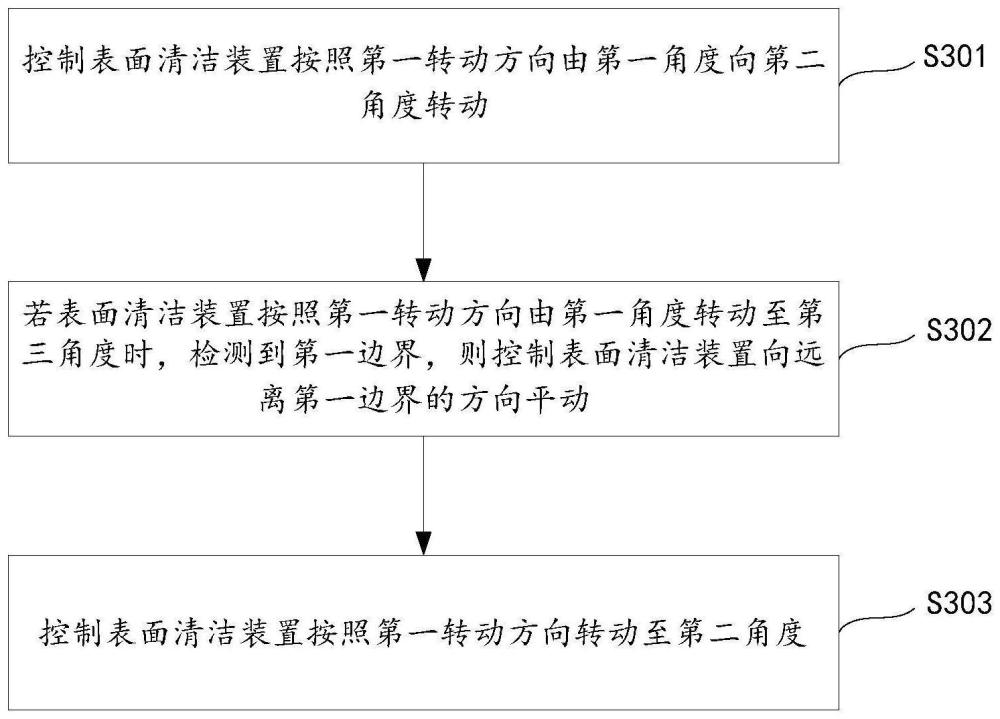
本申请实施例提供的一种表面清洁装置的控制方法及表面清洁装置,所述方法包括:控制表面清洁装置按照第一转动方向由第一角度向第二角度转动,第一角度为表面清洁装置在待清洁表面上的初始位姿对应的角度,第二角度为表面清洁装置在待清洁表面上的工作位姿对应的角度;若表面清洁装置按照第一转动方向由第一角度转动至第三角度时,检测到第一边界,则控制表面清洁装置向远离第一边界的方向平动,第三角度和第二角度的差值小于90°;控制表面清洁装置按照第一转动方向转动至第二角度。在本申请中,在执行清洁操作之前,用户可以以任意位姿将表面清洁装置放置在待清洁表面上,表面清洁装置自动调整姿态至工作位姿,操作方便,提高用户体验。
技术研发人员:杨俊
受保护的技术使用者:北京赫特智慧科技有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!