一种拖布震动装置及清洁机器人的制作方法
本申请涉及清洁设备,尤其涉及一种拖布震动装置及清洁机器人。
背景技术:
1、清洁机器人是为人类服务的特种机器人,主要从事家庭卫生的清洁工作。清洁机器人的底部通常都设置有拖布组件,能够代替人手对地面进行擦拭和清洗,给人们的生活带来了极大的便利性。
2、在相关技术中,清洁机器人的内部设置有与拖布组件连接的拖布震动装置,拖布震动装置包括驱动机构、往复轮和连杆,往复轮上设置有曲线槽,连杆的一端滑动连接于曲线槽内,另一端与拖布组件连接,当驱动机构驱动往复轮转动时,连杆便可带动拖布组件沿直线方向往复移动,使得清洁机器人在行驶的过程中,拖布组件能够左右摆动清洗地面。
3、然而,相关技术中的拖布组件只能够沿直线方向往复移动,使得拖布组件只在单一方向上的实际清洁面积大于拖布组件本身,总体的往复清洁的面积较小,导致拖布组件的清洁效率较低。
技术实现思路
1、有鉴于此,本申请的目的是为了克服现有技术中的不足,提供一种拖布震动装置及清洁机器人,以解决现有技术中拖布组件只能够沿直线方向往复移动,拖布组件的清洁效果较差的技术问题。
2、为解决上述技术问题,本申请提供了:
3、一种拖布震动装置,应用于清洁机器人,所述拖布震动装置包括连接组件,所述连接组件包括:
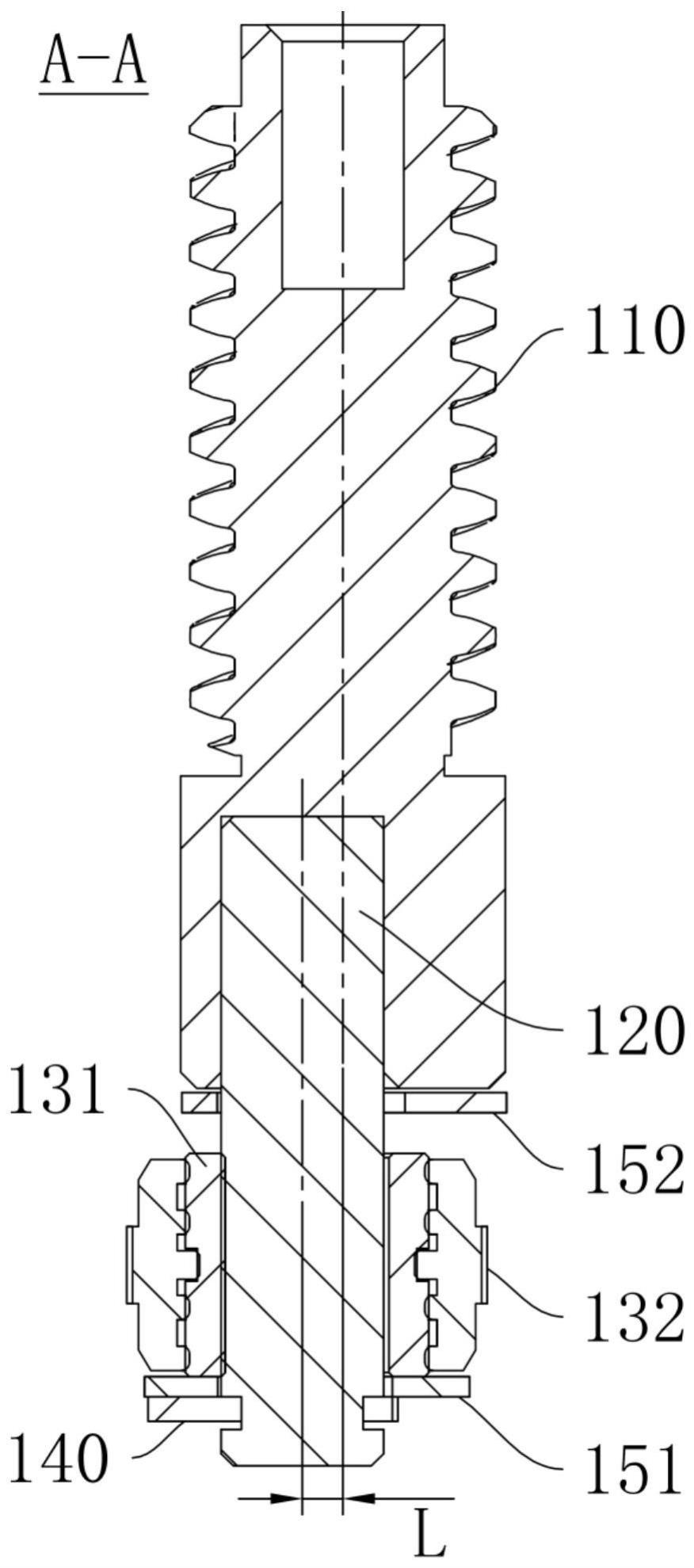
4、驱动轴,所述驱动轴的端部开设有偏心孔,所述偏心孔的中心线与所述驱动轴的转动轴线不重合;
5、摆动轴,所述摆动轴的一端固定于所述偏心孔内;
6、连接件,所述连接件上开设有穿轴孔,所述摆动轴的另一端穿设于所述穿轴孔内,且所述摆动轴能够相对所述连接件转动,所述连接件与所述清洁机器人的拖布组件连接;
7、当所述驱动轴绕其转动轴线转动时,所述驱动轴带动所述摆动轴绕所述驱动轴的转动轴线偏心转动,实现所述拖布组件相对待清洁面往复运动。
8、另外,根据本申请的连接组件,还可具有如下附加的技术特征:
9、在本申请的一些实施例中,所述连接组件还包括卡环,所述摆动轴远离所述偏心孔的一端沿其周向开设有环形卡槽,所述卡环卡接于所述环形卡槽且抵接于所述连接件,以限制所述摆动轴沿其轴线方向移动。
10、在本申请的一些实施例中,所述连接组件还包括第一耐磨垫圈,所述第一耐磨垫圈套设于所述摆动轴上且抵接于所述卡环和所述连接件之间。
11、在本申请的一些实施例中,所述连接组件还包括固定于所述驱动轴的端部的第二耐磨垫圈,所述第二耐磨垫圈背离所述驱动轴的一侧与所述拖布组件相抵接。
12、在本申请的一些实施例中,所述连接件包括导向辊和连接套,所述连接套与所述拖布组件固定连接,所述导向辊转动地设置于所述连接套内,所述导向辊上开设有所述穿轴孔,所述摆动轴的另一端固定于所述穿轴孔内。
13、在本申请的一些实施例中,所述偏心孔的中心线与所述驱动轴的转动轴线之间的距离为l,满足关系式:0.5mm≤l≤1.5mm。
14、在本申请的一些实施例中,所述驱动轴和所述摆动轴均为圆柱体,所述偏心孔为圆形孔。
15、在本申请的一些实施例中,所述驱动轴的直径d和所述摆动轴的直径d满足关系式:d/d=i,2/5≤i≤3/5。
16、所述拖布震动装置还包括驱动件和拖布支架,所述拖布支架上开设有贯穿其的限位槽,所述限位槽用于放置所述拖布组件,所述驱动件与所述驱动轴远离所述偏心孔的一端连接,用于驱动所述驱动轴绕其转动轴线转动,以使所述拖布组件沿所述限位槽的槽壁相对所述待清洁面往复运动。
17、本申请的第二方面提供了一种清洁机器人,包括上述实施例中的拖布震动装置。
18、相对于现有技术,本申请的有益效果是:
19、本申请提出一种拖布震动装置,应用于清洁机器人,拖布震动装置的连接组件包括:开设有偏心孔的驱动轴,一端固定于偏心孔内的摆动轴,以及开设有穿轴孔的连接件。偏心孔的中心线与驱动轴的转动轴线不重合,摆动轴的另一端穿设于穿轴孔内,且摆动轴能够相对连接件转动,连接件与清洁机器人的拖布组件连接。
20、当驱动轴绕其转动轴线转动时,驱动轴带动摆动轴绕驱动轴的转动轴线偏心转动,从而实现拖布组件相对待清洁面往复运动,也即,拖布组件在摆动轴的带动下,能够绕驱动轴的转动轴线对待清洁面往复打圈擦洗,使拖布组件在360°方向上的实际清洁面积均大于拖布组件本身,从而提高了拖布组件的清洁效率。
技术特征:
1.一种拖布震动装置,应用于清洁机器人,其特征在于,所述拖布震动装置包括连接组件,所述连接组件包括:
2.根据权利要求1所述的拖布震动装置,其特征在于,所述连接组件还包括卡环,所述摆动轴远离所述偏心孔的一端沿其周向开设有环形卡槽,所述卡环卡接于所述环形卡槽且抵接于所述连接件,以限制所述摆动轴沿其轴线方向移动。
3.根据权利要求2所述的拖布震动装置,其特征在于,所述连接组件还包括第一耐磨垫圈,所述第一耐磨垫圈套设于所述摆动轴上且抵接于所述卡环和所述连接件之间。
4.根据权利要求2所述的拖布震动装置,其特征在于,所述连接组件还包括固定于所述驱动轴的端部的第二耐磨垫圈,所述第二耐磨垫圈背离所述驱动轴的一侧与所述拖布组件相抵接。
5.根据权利要求1至4中任一项所述的拖布震动装置,其特征在于,所述连接件包括导向辊和连接套,所述连接套与所述拖布组件固定连接,所述导向辊转动地设置于所述连接套内,所述导向辊上开设有所述穿轴孔,所述摆动轴的另一端固定于所述穿轴孔内。
6.根据权利要求1所述的拖布震动装置,其特征在于,所述偏心孔的中心线与所述驱动轴的转动轴线之间的距离l,满足关系式:0.5mm≤l≤1.5mm。
7.根据权利要求1所述的拖布震动装置,其特征在于,所述驱动轴和所述摆动轴均为圆柱体,所述偏心孔为圆形孔。
8.根据权利要求7所述的拖布震动装置,其特征在于,所述驱动轴的直径d和所述摆动轴的直径d满足关系式:d/d=i,2/5≤i≤3/5。
9.根据权利要求1至8中任一项所述的拖布震动装置,其特征在于,所述拖布震动装置还包括驱动件和拖布支架,所述拖布支架上开设有贯穿其的限位槽,所述限位槽用于放置所述拖布组件,所述驱动件与所述驱动轴远离所述偏心孔的一端连接,用于驱动所述驱动轴绕其转动轴线转动,以使所述拖布组件沿所述限位槽的槽壁相对所述待清洁面往复运动。
10.一种清洁机器人,其特征在于,包括权利要求9所述的拖布震动装置。
技术总结
本申请公开一种拖布震动装置及清洁机器人,属于清洁设备技术领域。拖布震动装置的连接组件包括:开设有偏心孔的驱动轴,一端固定于偏心孔内的摆动轴,以及开设有穿轴孔的连接件。偏心孔的中心线与驱动轴的转动轴线不重合,摆动轴的另一端穿设于穿轴孔内,摆动轴能够相对连接件转动,连接件与清洁机器人的拖布组件连接。本申请提供的连接组件,当驱动轴绕其转动轴线转动时,驱动轴带动摆动轴绕驱动轴的转动轴线偏心转动,从而实现拖布组件相对待清洁面往复运动,也即拖布组件在摆动轴的带动下,能够绕驱动轴的转动轴线对待清洁面往复打圈擦洗,使拖布组件在360°方向上的实际清洁面积均大于拖布组件本身,从而提高了拖布组件的清洁效率。
技术研发人员:胡永华,杨剑君
受保护的技术使用者:深圳市优纪元科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!