一种清洁机器人的行走方法与流程
本发明涉及清洁机器人领域。
背景技术:
1、伴随着懒人经济、宅经济等的兴起,越来越多的人选择把钱花在提高居家生活品质上,把人从繁重的家务中解放出来的清洁机器人市场由此快速增长,从2010年起步,到近几年销售规模快速爆发,但使用体验不断被诟病,对于乱七八糟的房间,有些地方无法通过,关键是扫不干净。
2、清洁机器人之所以能够行进,与它的行走结构是分不开的。一个设计优秀的行走机构能让清洁机器人性能提升好几倍。常见的有履带式、轮式、足式等,但都是擦洗机构与行走机构分离的设计,为保证行走机构摩擦力的需求而降低擦洗装置的摩擦力,导致清洁机器人的清洗效果较差,清洗因此提出一种清洁机器人擦洗机构与行走机构结合的技术。
技术实现思路
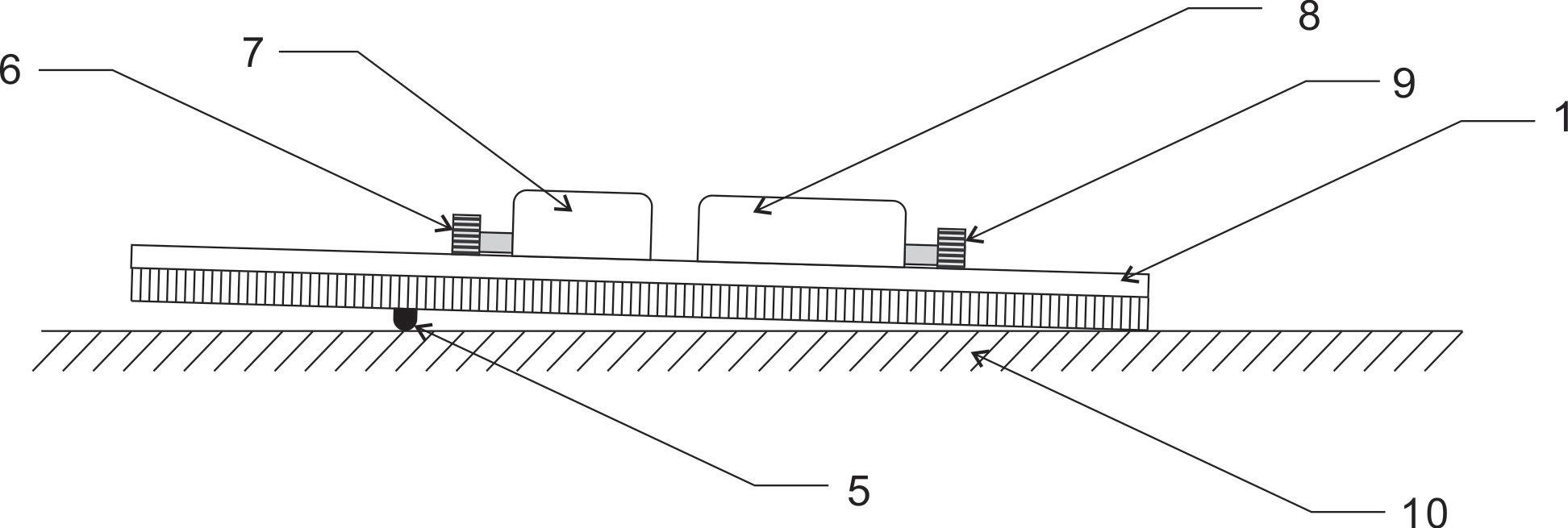
1、要解决现有技术中存在的问题,本发明的目的在于提供一种具有清洁机器人擦洗机构与行走机构结合的技术,该发明通过调整支撑轮位置变化,支撑轮位置的擦洗环压力降低与对向位置形成摩擦力差,产生一个与旋转方向反向的推力。
2、为了实现上述目的,本发明采用了如下技术方案:一种扫地机器人行走方法,包括可转动的擦洗环,擦洗环同时是清洁机器人行走机构,擦洗环上固定有齿环与驱动电机的齿轮咬合;擦洗环内安装环形支撑轮架,支撑轮架固定有齿环与伺服电机的齿轮咬合,并安装有两个支撑轮,为方向控制机构。
技术特征:
1.一种清洁机器人的行走的技术,其特征在于,包括可转动的擦洗环,擦洗环同时是清洁机器人行走机构,擦洗环上固定有齿环与驱动电机的齿轮咬合;擦洗环内安装环形支撑轮架,支撑轮架固定有齿环与伺服电机的齿轮咬合,并安装有两个支撑轮。
2.如权利要求1所述,其特征在于, 其中支撑轮突出于擦洗环的接触面。
3.如权利要求1、2所述,其特征在于, 其中支撑轮的作用,使运行至支撑轮的擦洗环的接触面与地面压力减小,对向擦洗环齿环的接触面与地面压力增加形成摩擦力差,产生一个与旋转方向顺向的推力。
4.如权利要求1、2、3所述,其特征在于,通过支撑轮增加或减小擦洗环或擦洗盘局部区域的压力变化产生推力的行走方法。
技术总结
要解决现有技术中存在的问题,本发明的目的在于提供一种具有清洁机器人擦洗机构与行走机构结合的技术,该发明通过调整支撑轮位置变化,支撑轮位置的擦洗环压力降低与对向位置形成摩擦力差,产生一个与旋转方向反向的推力。
技术研发人员:罗文兴,马敬浩
受保护的技术使用者:北京烁蓝科技发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!