清扫机器人的控制方法、机器人及计算机可读存储介质与流程
本发明大致涉及机器人,尤其涉及一种清扫机器人的控制方法,一种机器人以及一种计算机可读存储介质。
背景技术:
1、现有的清洁机器人在针对实体墙进行沿边贴墙清扫时,大多采用沿边红外传感器、接触式传感器等简单传感检测方案,实现的沿边贴墙清扫的运动控制策略相对单一,在清扫过程中,需要碰撞接触实现贴墙清扫及避障,对大型的商用清洁机器人而言不可靠且不适用;针对实体墙缺乏有效的多传感器融合感知方案,不能应用在相对复杂且存在障碍物的墙体边缘环境;单一的运动控制策略无法满足复杂墙体边界环境中的近距离清扫。因此,急需一种能够满足机器人在各种复杂的实体墙环境进行近距离贴墙清扫和无碰撞要求的技术方案。
2、背景技术部分的内容仅仅是发明人所知晓的技术,并不当然代表本领域的现有技术。
技术实现思路
1、针对现有技术存在问题中的一个或多个,本发明提供一种清扫机器人的控制方法,该方法基于一种融合感知方案并结合完备的清扫运动控制策略,能够使机器人在各种复杂的实体墙环境进行近距离贴墙清扫和无碰撞要求。所述清扫机器人安装有激光雷达和深度相机,所述控制方法包括:
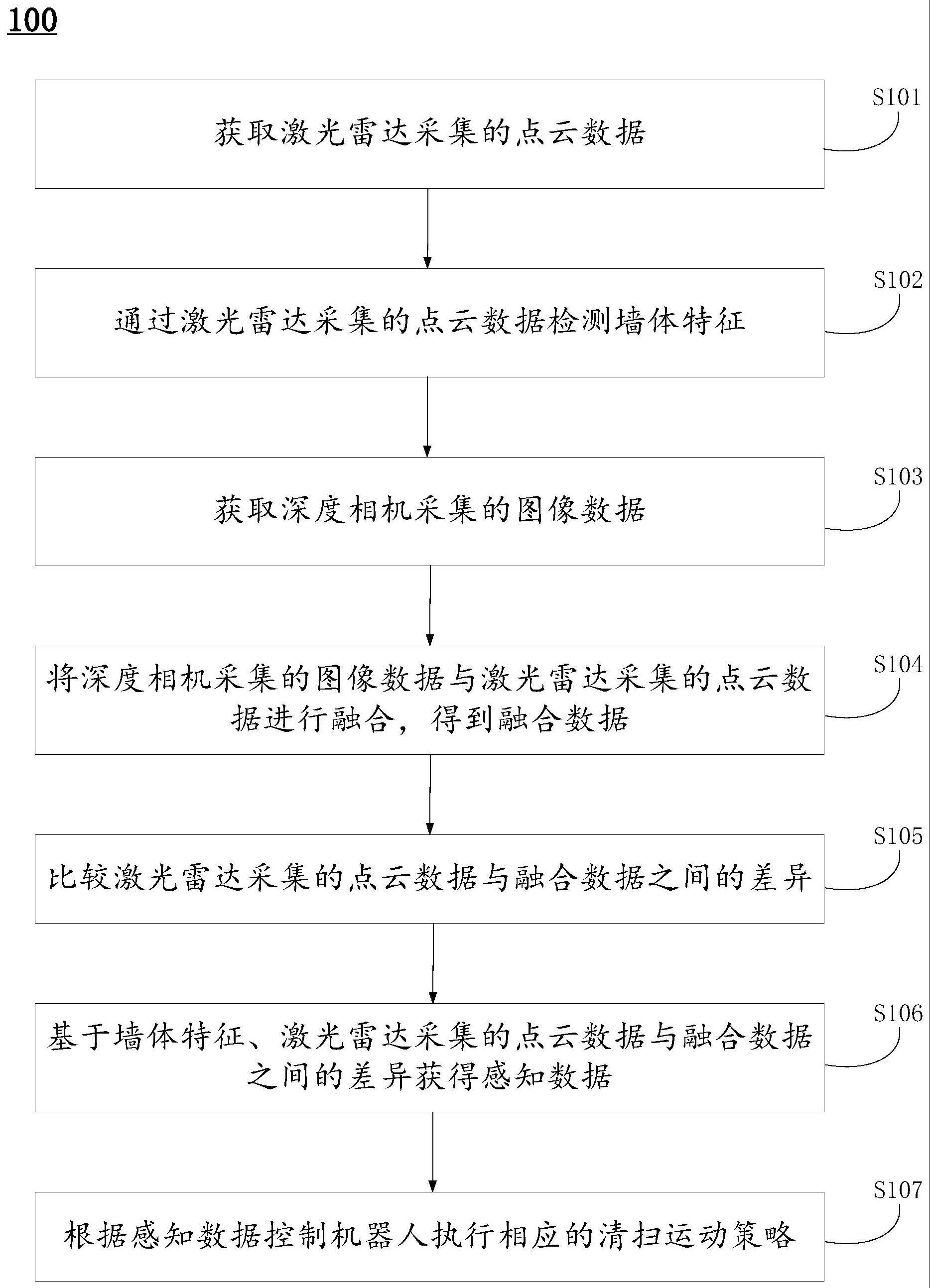
2、获取所述激光雷达采集的点云数据;
3、通过所述激光雷达采集的点云数据检测墙体特征;
4、获取所述深度相机采集的图像数据;
5、将所述深度相机采集的图像数据与所述激光雷达采集的点云数据进行融合,得到融合数据;
6、比较所述激光雷达采集的点云数据与所述融合数据之间的差异;
7、基于所述墙体特征、所述激光雷达采集的点云数据与所述融合数据之间的差异获得感知数据;和
8、根据所述感知数据控制所述机器人执行相应的清扫运动策略。
9、根据本发明的一个方面,其中所述通过所述激光雷达采集的点云数据检测墙体特征的步骤包括:在所述激光雷达采集的点云中,通过与预设结构化特征进行特征匹配,检测所述墙体特征。
10、根据本发明的一个方面,其中所述比较所述激光雷达采集的点云数据与所述融合数据之间的差异的步骤包括:在期望位姿处,基于所述点云数据确定所述机器人与所述墙体的第一距离,基于所述融合数据确定所述机器人与所述墙体的第二距离,并确定所述第一距离和所述第二距离的第一差异。
11、根据本发明的一个方面,其中所述比较所述激光雷达采集的点云数据与所述融合数据之间的差异的步骤还包括:基于所述点云数据获得所述机器人的第一当前位姿,确定所述第一当前位姿的第一航向角度与所述期望位姿的第二航向角度之间的航向差异。
12、根据本发明的一个方面,其中所述基于所述墙体特征、所述激光雷达采集的点云数据与所述融合数据之间的差异获得感知数据的步骤包括:确定所述墙体特征是否为预设特征、确定所述第一差异是否小于第一阈值、并确定所述航向差异是否小于第二阈值,得到确定结果,基于所述确定结果获得所述感知数据。
13、根据本发明的一个方面,其中所述基于所述确定结果获得所述感知数据的步骤包括:当确定所述墙体特征为所述连续直线特征或所述连续曲线特征、所述第一差异小于所述第一阈值,并且所述航向差异小于所述第二阈值时,将所述激光雷达采集的点云数据作为所述感知数据;当确定所述墙体特征不满足所述连续直线特征或所述连续曲线特征、所述第一差异不小于所述第一阈值,或所述航向差异不小于所述第二阈值时,将所述融合数据作为所述感知数据。
14、根据本发明的一个方面,其中所述根据所述感知数据控制所述机器人执行相应的清扫运动策略的步骤包括:根据所述感知数据,适应性调整所述机器人的位姿和/或速度,以控制所述机器人靠墙侧与所述墙体保持第一预设距离执行清扫任务。
15、根据本发明的一个方面,其中所述根据所述感知数据控制所述机器人执行相应的清扫运动策略的步骤还包括:根据所述感知数据,分别检测所述机器人的正前方、侧前方和靠墙侧相反侧是否存在障碍物,如果存在障碍物,控制所述机器人与正前方障碍物保持第二预设距离,与侧前方障碍物保持第三预设距离,并与靠墙侧相反侧障碍物保持第四预设距离,其中所述第四预设距离大于所述第一预设距离。
16、本发明还提供一种机器人,包括:
17、壳体;
18、移动底盘,具有行走机构;
19、传感器,包括激光雷达和深度相机,所述激光雷达和所述深度相机安装于所述机器人,配置成采集所述机器人的周围环境信息;
20、清洁装置,用于清扫;和
21、处理单元,与所述行走机构、所述激光雷达以及所述深度相机耦合,配置成可执行如上所述的控制方法。
22、本发明还提供一种计算机可读存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如上所述的控制方法。
23、采用本发明的技术方案,能够使机器人针对各种复杂的实体墙进行近距离贴墙清扫,对环境变化具备非常好的适应能力,能够针对不同的环境完成高质量的沿边清扫,并能够针对其周边障碍物实现良好的检测与避障效果,更好地满足机器人在沿边清扫过程中的墙边清扫细节和无碰撞要求,进一步提升了机器人的安全性。
技术特征:
1.一种清扫机器人的控制方法,所述清扫机器人安装有激光雷达和深度相机,所述控制方法包括:
2.根据权利要求1所述的控制方法,其中所述通过所述激光雷达采集的点云数据检测墙体特征的步骤包括:在所述激光雷达采集的点云中,通过与预设结构化特征进行特征匹配,检测所述墙体特征。
3.根据权利要求1所述的控制方法,其中所述比较所述激光雷达采集的点云数据与所述融合数据之间的差异的步骤包括:在期望位姿处,基于所述点云数据确定所述机器人与所述墙体的第一距离,基于所述融合数据确定所述机器人与所述墙体的第二距离,并确定所述第一距离和所述第二距离的第一差异。
4.根据权利要求3所述的控制方法,其中所述比较所述激光雷达采集的点云数据与所述融合数据之间的差异的步骤还包括:基于所述点云数据获得所述机器人的第一当前位姿,确定所述第一当前位姿的第一航向角度与所述期望位姿的第二航向角度之间的航向差异。
5.根据权利要求2-4中任一项所述的控制方法,其中所述基于所述墙体特征、所述激光雷达采集的点云数据与所述融合数据之间的差异获得感知数据的步骤包括:确定所述墙体特征是否为预设特征、确定所述第一差异是否小于第一阈值、并确定所述航向差异是否小于第二阈值,得到确定结果,基于所述确定结果获得所述感知数据。
6.根据权利要求5所述的控制方法,其中所述基于所述确定结果获得所述感知数据的步骤包括:当确定所述墙体特征为所述连续直线特征或所述连续曲线特征、所述第一差异小于所述第一阈值,并且所述航向差异小于所述第二阈值时,将所述激光雷达采集的点云数据作为所述感知数据;当确定所述墙体特征不满足所述连续直线特征或所述连续曲线特征、所述第一差异不小于所述第一阈值,或所述航向差异不小于所述第二阈值时,将所述融合数据作为所述感知数据。
7.根据权利要求6所述的控制方法,其中所述根据所述感知数据控制所述机器人执行相应的清扫运动策略的步骤包括:根据所述感知数据,适应性调整所述机器人的位姿和/或速度,以控制所述机器人靠墙侧与所述墙体保持第一预设距离执行清扫任务。
8.根据权利要求7所述的控制方法,其中所述根据所述感知数据控制所述机器人执行相应的清扫运动策略的步骤还包括:根据所述感知数据,分别检测所述机器人的正前方、侧前方和靠墙侧相反侧是否存在障碍物,如果存在障碍物,控制所述机器人与正前方障碍物保持第二预设距离,与侧前方障碍物保持第三预设距离,并与靠墙侧相反侧障碍物保持第四预设距离,其中所述第四预设距离大于所述第一预设距离。
9.一种机器人,包括:
10.一种计算机可读存储介质,包括存储于其上的计算机可执行指令,所述可执行指令在被处理器执行时实施如权利要求1-8中任一项所述的控制方法。
技术总结
本发明提供一种清扫机器人的控制方法,清扫机器人安装有激光雷达和深度相机,控制方法包括:获取激光雷达采集的点云数据;通过激光雷达采集的点云数据检测墙体特征;获取深度相机采集的图像数据;将深度相机采集的图像数据与激光雷达采集的点云数据进行融合,得到融合数据;比较激光雷达采集的点云数据与融合数据之间的差异;基于墙体特征、激光雷达采集的点云数据与述融合数据之间的差异获得感知数据;和根据感知数据控制机器人执行相应的清扫运动策略。采用本发明的技术方案,机器人对复杂环境的适应能力更强,能够更好地满足机器人在沿边清扫过程中的墙边清扫细节和无碰撞要求。
技术研发人员:蒋云,杨辉,李通,王翰,姚亚健,周恩德,吴松
受保护的技术使用者:武汉擎朗智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!